本文通过Matlab编程实现A* 算法,并通过几个简单的例子,打断点调试输出A*搜索的过程。
A* 算法是一种全局路径规划算法,通过A*算法可以在一个有障碍物的地图中找到从起点到终点的路径。
网上关于A* 算法的详细介绍有很多,博主也就不再赘述。推荐想学习的博友看一下这篇博文入门:《A*算法(超级详细讲解,附有举例的详细手写步骤)》,博主看完后有种醍醐灌顶的感觉,就想通过自己比较熟悉的Matlab实现一遍,所以就有了本文的内容。
由于博主是初学者,难免有一些错误,如果有博友发现bug恳请私信或评论告知。
新建一个Astar()函数如下,其中包含了输入参数和AstarSearch()算法函数。
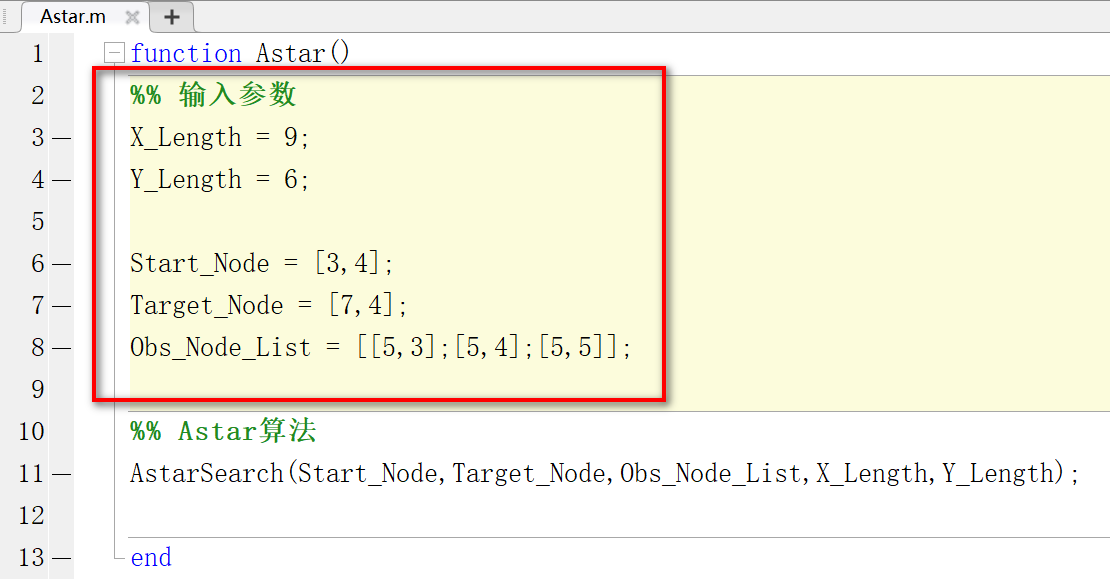
其中,含义分别如下:
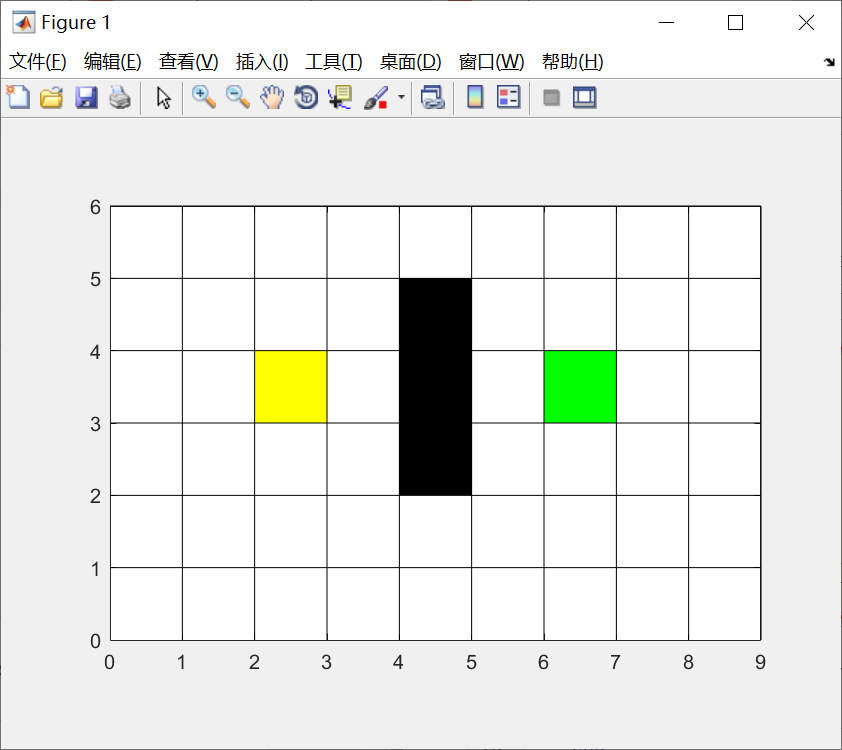
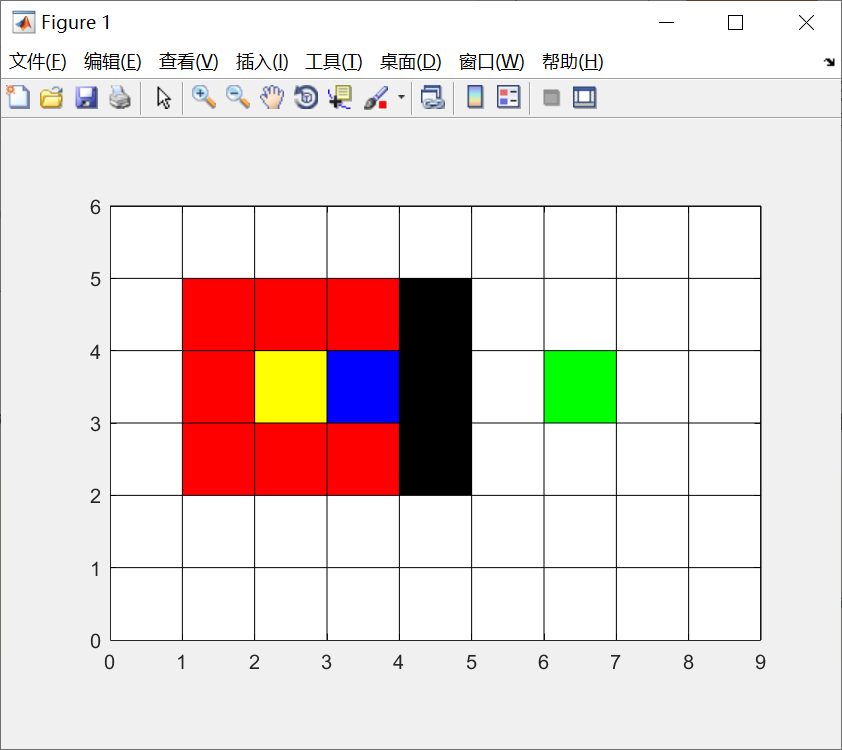
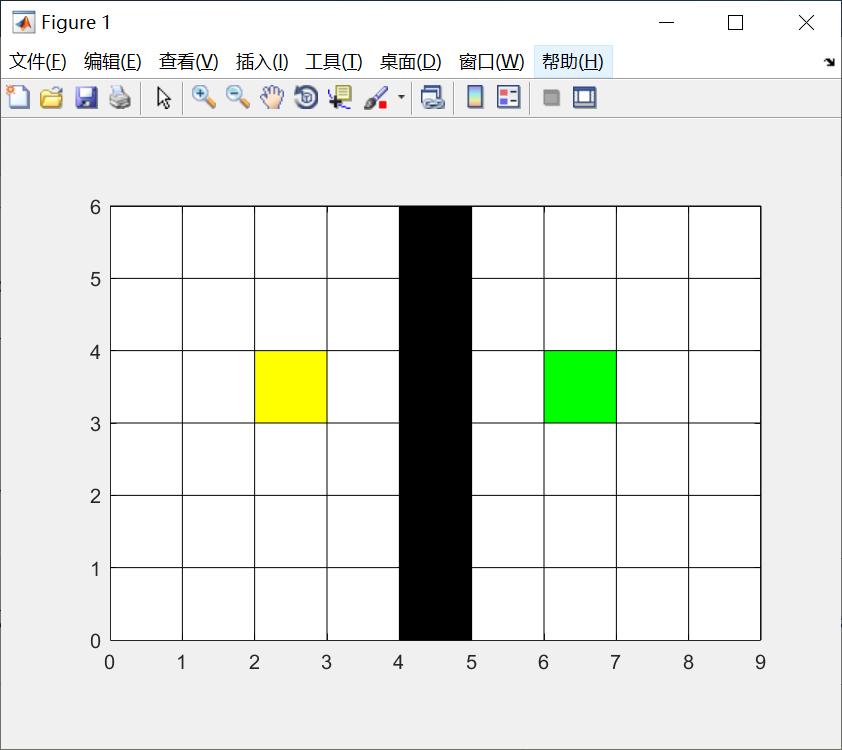
1)X_Length和Y_Length代表网格地图的长和宽,如图的参数就是代表9*6的网格。
2)Start_Node、Target_Node、Obs_Node_List分别为起点、终点、障碍物坐标。
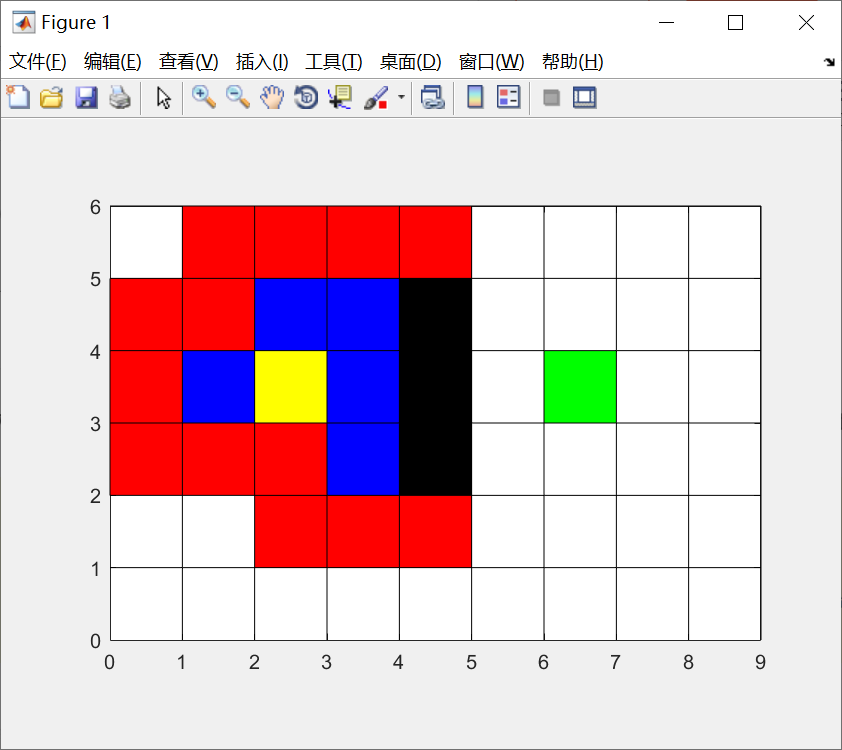
通过Plot函数画图可以直观地看到地图的大小以及黄色的起点、绿色的终点和黑色的障碍物:
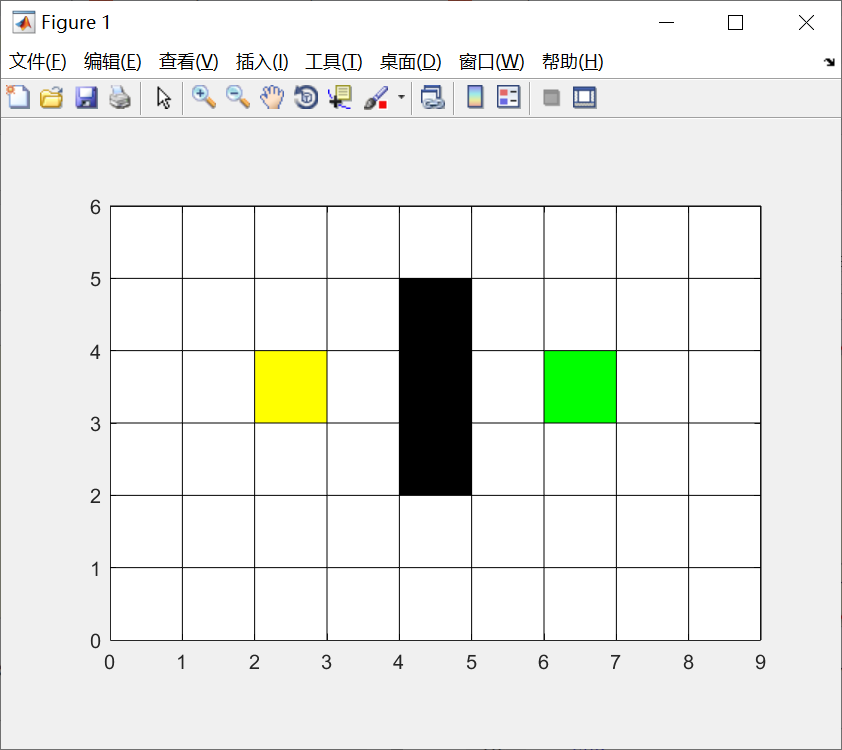
这些参数会传递给后面的AstarSearch()函数作为输入,用来进行A* 搜索算法。因此每次试验的时候直接调上面的参数就可以运行Matlab得出结果。
在A* 搜索算法的开始,博主定义了一些初始化变量,如下图所示:
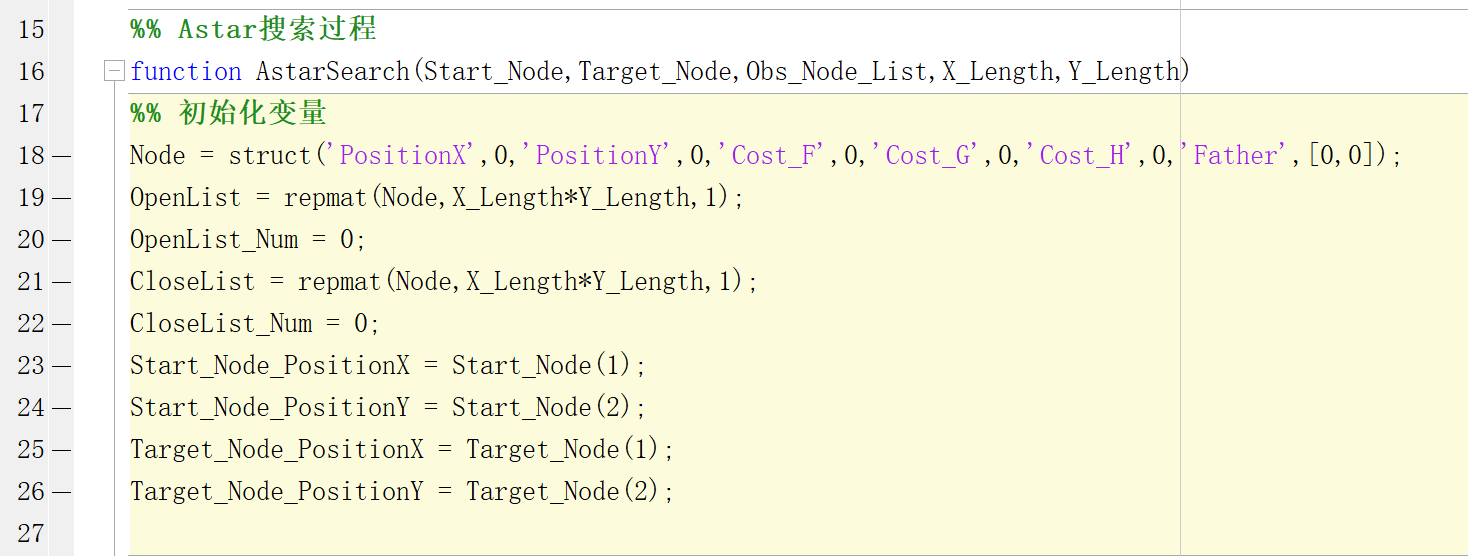
1)Node是节点的意思,是个结构体变量。其中的成员包括:PositionX,PositionY,代表横坐标和纵坐标;Cost_F,Cost_G,Cost_H,代表3个代价值;Father,表示父节点的坐标。
2)OpenList和CloseList是初始化的固定大小的数组,数组的元素是Node节点的结构体类型数组长度是地图的总网格数量;其实这样定义比较占用资源,不过是仿真也就无所谓了。
3)OpenList_Num和CloseList_Num是OpenList和CloseList中的有效元素个数。由于A* 循环的过程中会不断地增减OpenList和CloseList中的元素,所以Num值也会不断地加减。
循环过程比较长,基本上就是根据上面的链接中的方法来写的函数。其实核心就是将考察过的节点放入CloseList,将待考察的节点放入OpenList。同时在循环的过程中更新Cost的值,直到OpenList中如果出现目标点则代表搜索完成找到路径,或者OpenList为空则代表没找到路径。具体可以参考博主在附录里贴的Matlab代码。
另外,在每次循环结束的时候,会用一个PlotGridArea()函数画出当前循环的信息,例如哪些节点在OpenList,哪些在CloseList。
后文测试的时候,会在画图这里打个断点,来输出每次循环后的信息。
循环会通过两个条件跳出:OpenList中如果出现目标点则代表搜索完成找到路径,或者OpenList为空则代表没找到路径。跳出循环后会根据两种结果分别进行后处理,找到路径的话就会再画一张从起点到终点的图片,没找到就会弹窗提示。

画出路径的方法是:从OpenList中找到终点(Target_Node),然后找它的父节点,再找父节点的父节点,就这样顺藤摸瓜直到找到起点。这样就形成了一个从终点到起点的完整链路。
案例1用一个比较简单的9*6的网格来验证。
1)Matlab中定义初始点、结束点和障碍物点如下:
%% 输入参数
X_Length = 9;
Y_Length = 6;
Start_Node = [3,4];
Target_Node = [7,4];
Obs_Node_List = [[5,3];[5,4];[5,5]];
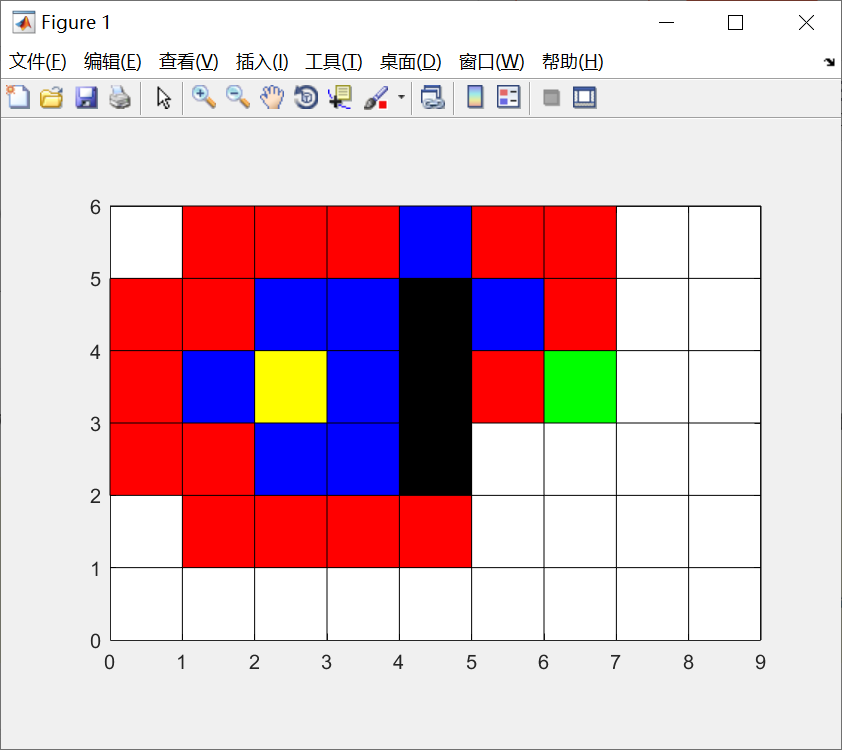
2)不打断点直接运行完Matlab程序以后,会分别在两张图中输出最后一次的OpenList、CloseList和画出的路线。
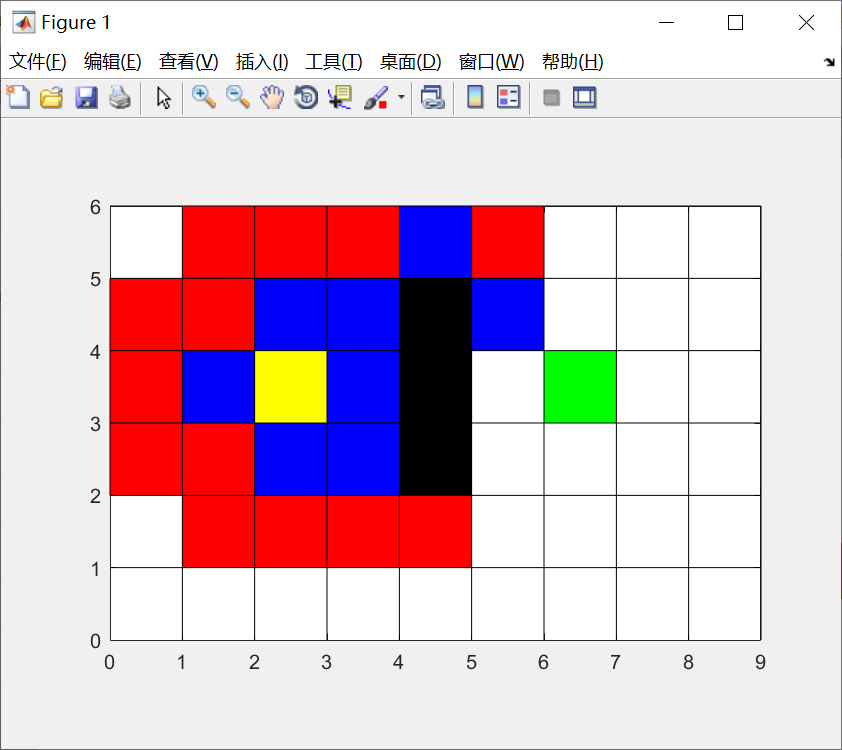
上图中蓝色的格子代表已经放入CloseList中的节点,红色代表放入OpenList中的节点;
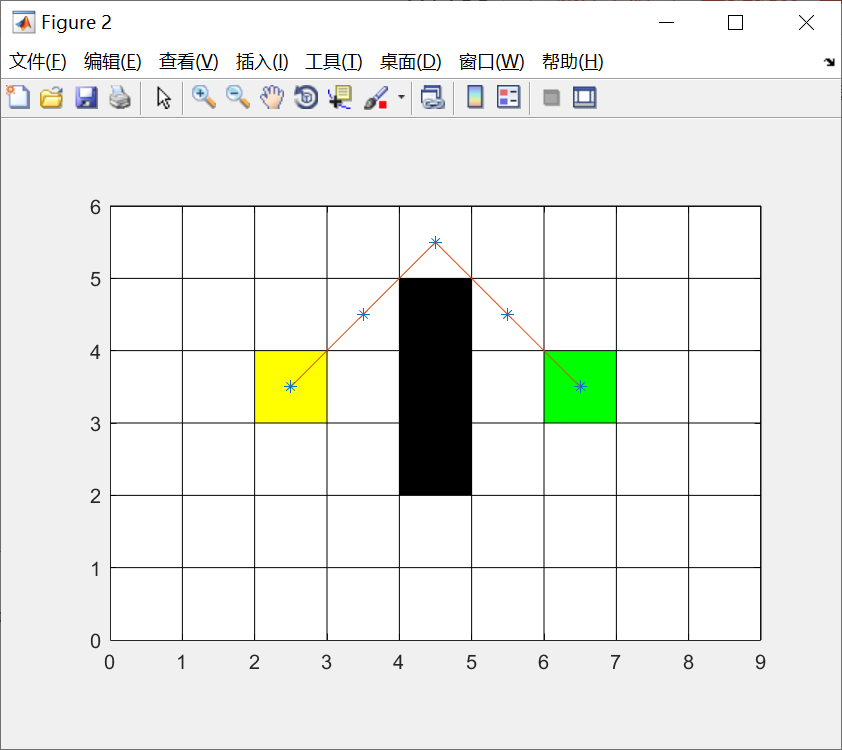
上图中是最后画出的从起点到终点的路线。
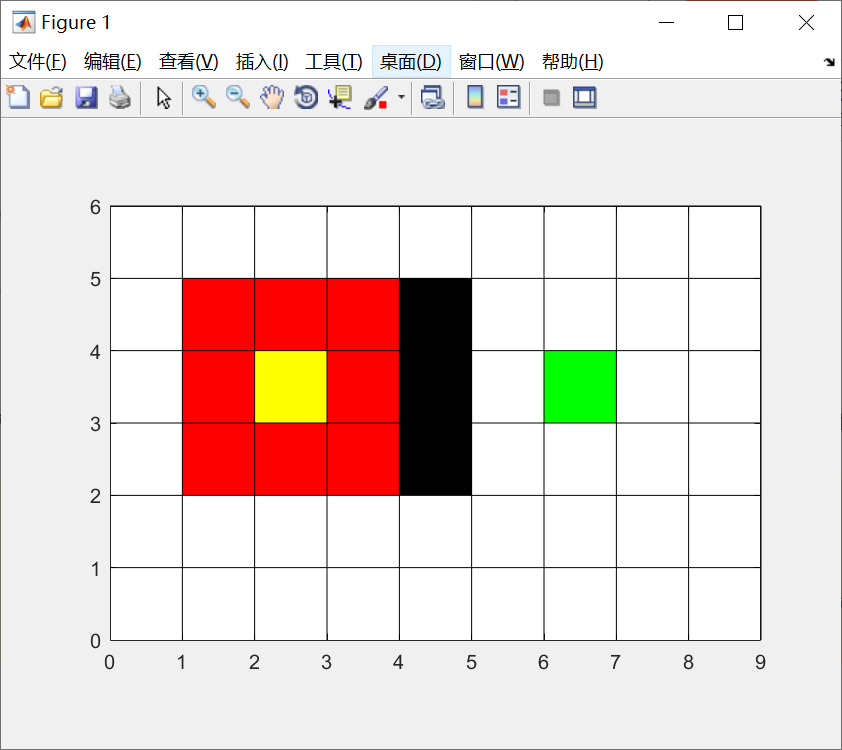
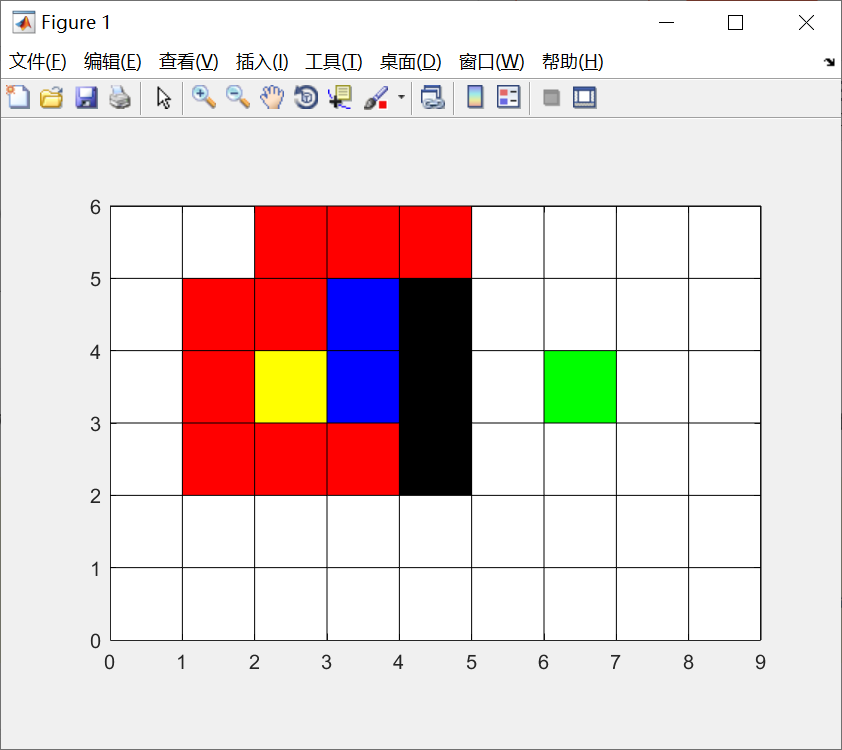
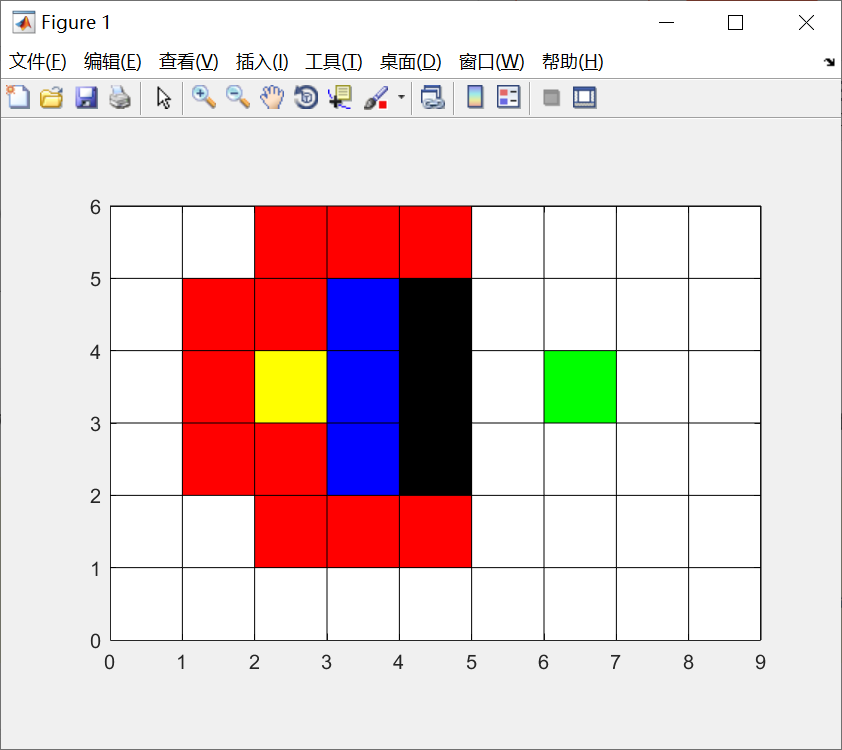
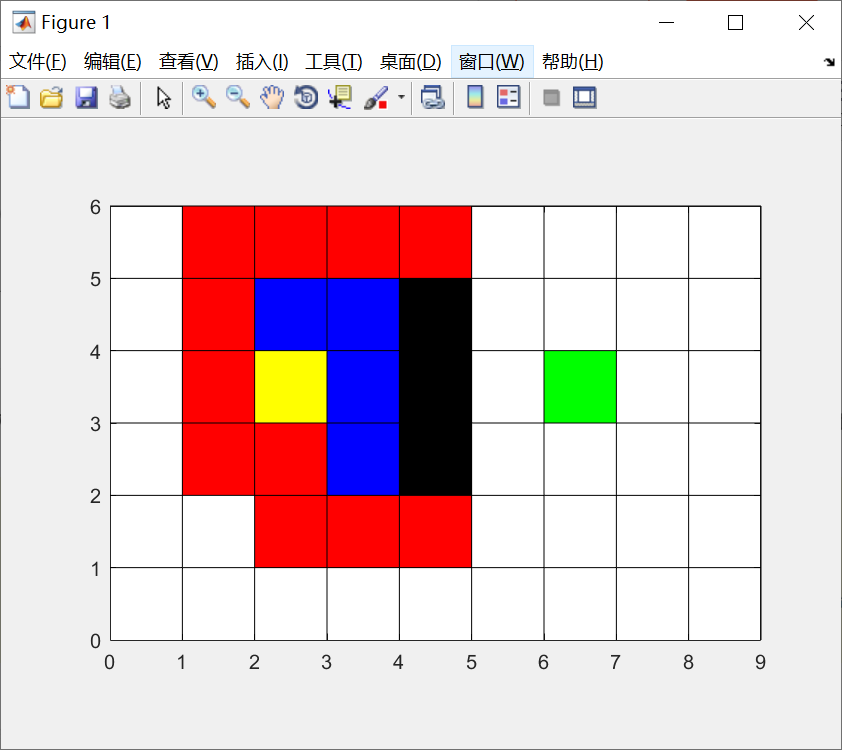
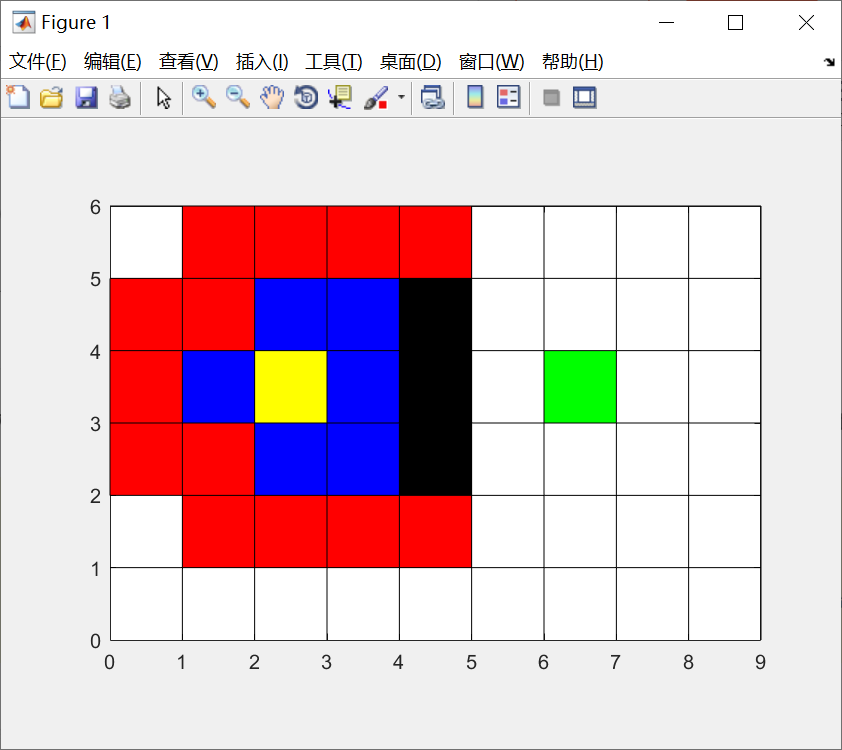
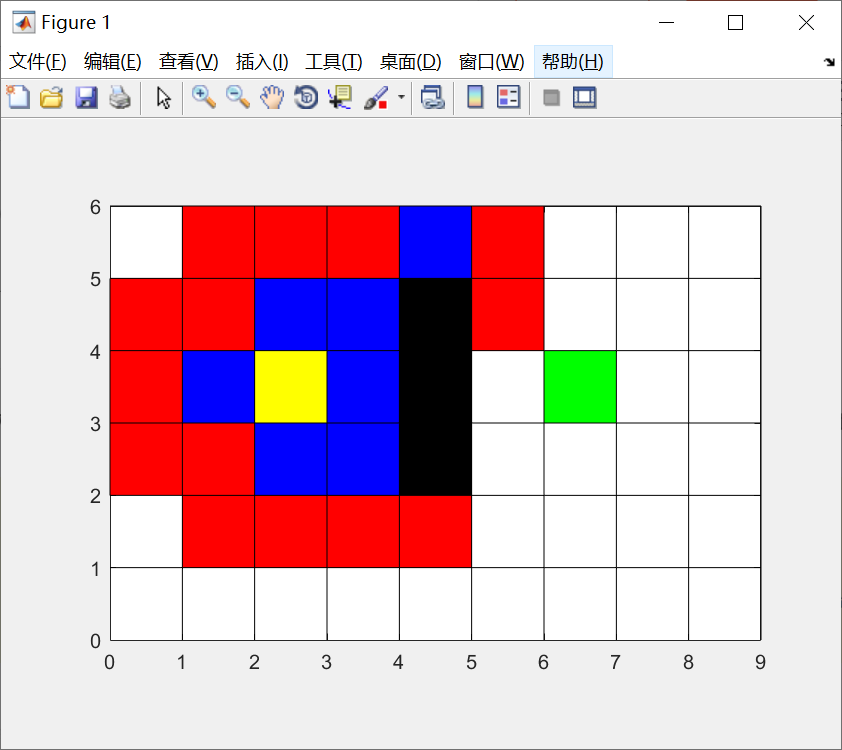
3)另外,也可以在While循环的最后打个断点,输出每次循环后的OpenList和CloseList网格。

在该案例中,每次输出的图片如下:
案例2用一个稍微复杂点的情况来验证。
1)Matlab中定义初始点、结束点和障碍物点如下:
%% 输入参数
X_Length = 12;
Y_Length = 8;
Start_Node = [2,2];
Target_Node = [11,7];
Obs_Node_List = [[4,2];[4,3];[4,4];[4,5];[3,5];[2,5];
[6,1];[6,2];[6,4];[6,5];[6,7];[6,8];
[8,5];[9,5];[10,5];[8,4];[9,4];[10,4]];
2)运行程序输出结果:

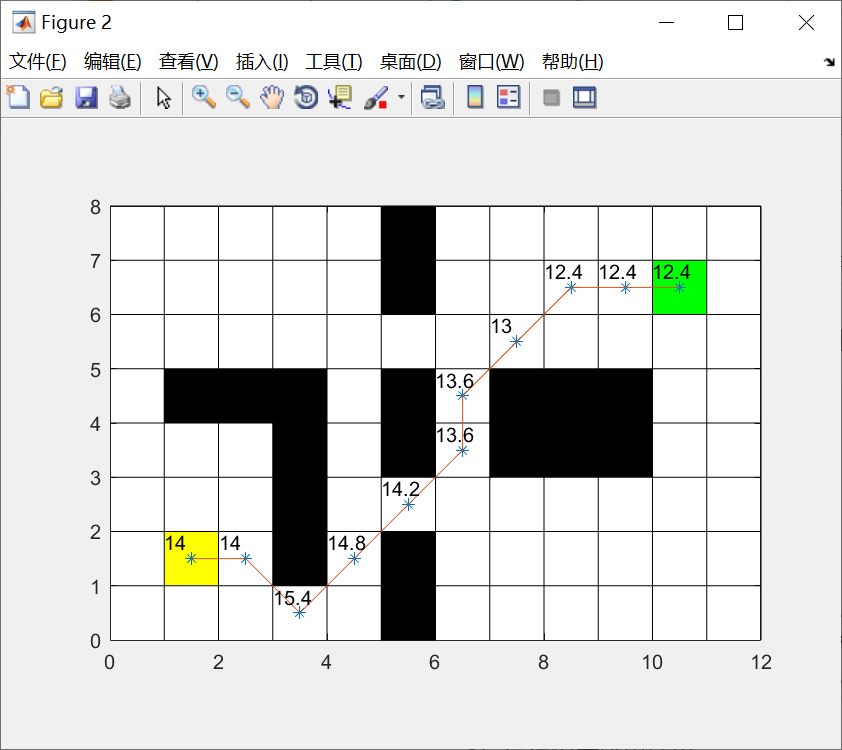
上图中博主优化了一下代码,把Cost_F代价也打印出来了。
案例3用一个找不到路径的情况来验证。
1)Matlab中定义初始点、结束点和障碍物点如下:
%% 输入参数
X_Length = 9;
Y_Length = 6;
Start_Node = [3,4];
Target_Node = [7,4];
Obs_Node_List = [[5,1];[5,2];[5,3];[5,4];[5,5];[5,6]];
2)运行程序输出结果:
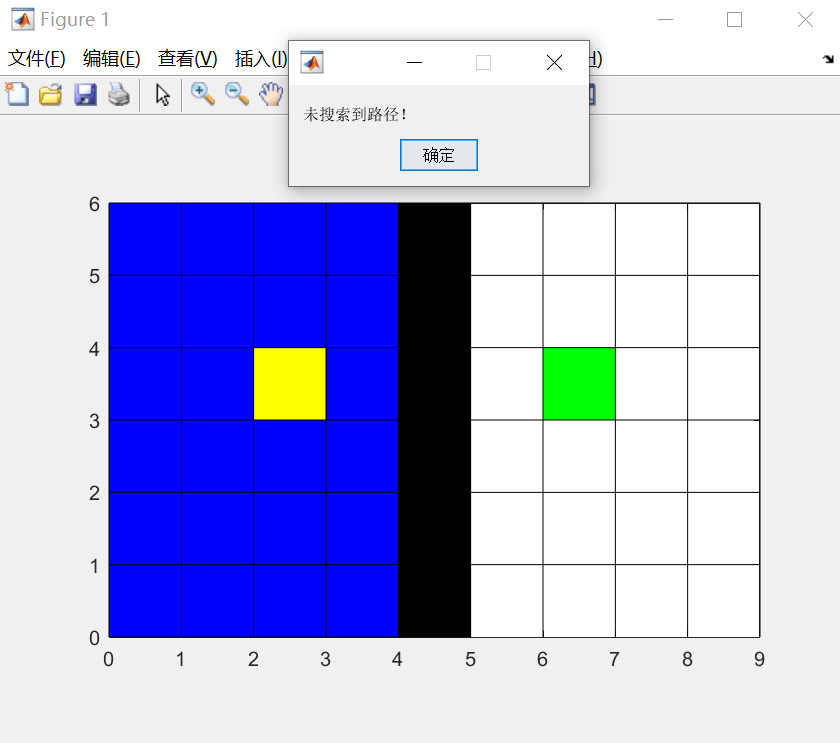
程序将障碍物左边的所有点都找了一遍,放入了CloseList。此时OpenList中已经没有了点,所以判定为没有合适的路径。
本文是博主通过Matlab编程来学习A*算法的总结,虽然学习过程比较坎坷,但也收获了不少。另外,由于这是博主自己的学习过程,肯定有很多不严谨的地方和错误,希望博友可以用批判的眼光看待,如果发现错误和不规范之处,也希望多多交流讨论。
下面的代码在Matlab2018a中用文中的3个案例验证过。可以建立一个Astar.m文件,再把代码拷贝进去。
function Astar()
%% 输入参数
X_Length = 9;
Y_Length = 6;
Start_Node = [3,4];
Target_Node = [7,4];
Obs_Node_List = [[5,1];[5,2];[5,3];[5,4];[5,5];[5,6]];
%% Astar算法
AstarSearch(Start_Node,Target_Node,Obs_Node_List,X_Length,Y_Length);
end
%% Astar搜索过程
function AstarSearch(Start_Node,Target_Node,Obs_Node_List,X_Length,Y_Length)
%% 初始化变量
Node = struct('PositionX',0,'PositionY',0,'Cost_F',0,'Cost_G',0,'Cost_H',0,'Father',[0,0]);
OpenList = repmat(Node,X_Length*Y_Length,1);
OpenList_Num = 0;
CloseList = repmat(Node,X_Length*Y_Length,1);
CloseList_Num = 0;
Start_Node_PositionX = Start_Node(1);
Start_Node_PositionY = Start_Node(2);
Target_Node_PositionX = Target_Node(1);
Target_Node_PositionY = Target_Node(2);
%% 将初始节点加入CloseList
Node_Father.PositionX = Start_Node_PositionX;
Node_Father.PositionY = Start_Node_PositionY;
Node_Father.Cost_G = 0;
Node_Father.Cost_H = abs(Start_Node_PositionX - Target_Node_PositionX) + abs(Start_Node_PositionY - Target_Node_PositionY);
Node_Father.Cost_F = Node_Father.Cost_G + Node_Father.Cost_H;
Node_Father.Father = [0,0];
CloseList_Num = CloseList_Num + 1;
CloseList(CloseList_Num) = Node_Father;
%% 打印地图网格和起始、终止、障碍物点
PlotGridArea(X_Length,Y_Length,Start_Node,Target_Node,Obs_Node_List,OpenList,OpenList_Num,CloseList,CloseList_Num)
%% 循环查找路径
while 1
Node_Child_List = repmat(Node,8,1);
Node_Child_List(1).PositionX = Node_Father.PositionX + 1;Node_Child_List(1).PositionY = Node_Father.PositionY;
Node_Child_List(2).PositionX = Node_Father.PositionX + 1;Node_Child_List(2).PositionY = Node_Father.PositionY + 1;
Node_Child_List(3).PositionX = Node_Father.PositionX;Node_Child_List(3).PositionY = Node_Father.PositionY + 1;
Node_Child_List(4).PositionX = Node_Father.PositionX - 1;Node_Child_List(4).PositionY = Node_Father.PositionY + 1;
Node_Child_List(5).PositionX = Node_Father.PositionX - 1;Node_Child_List(5).PositionY = Node_Father.PositionY;
Node_Child_List(6).PositionX = Node_Father.PositionX - 1;Node_Child_List(6).PositionY = Node_Father.PositionY - 1;
Node_Child_List(7).PositionX = Node_Father.PositionX;Node_Child_List(7).PositionY = Node_Father.PositionY - 1;
Node_Child_List(8).PositionX = Node_Father.PositionX + 1;Node_Child_List(8).PositionY = Node_Father.PositionY - 1;
%计算子节点中的属性
for i = 1:8
PositionX = Node_Child_List(i).PositionX;
PositionY = Node_Child_List(i).PositionY;
%判断是否超地图范围,如果是则不考虑
if PositionX <= 0 || PositionX > X_Length || PositionY <= 0 || PositionY > Y_Length
continue;
end
%判断是否障碍物节点,如果是则不考虑
IsObsNodeFlag = false;
for j = 1:size(Obs_Node_List,1)
Obs_Node_PositionX = Obs_Node_List(j,1);
Obs_Node_PositionY = Obs_Node_List(j,2);
if PositionX == Obs_Node_PositionX && PositionY == Obs_Node_PositionY
IsObsNodeFlag = true;
break;
end
end
if IsObsNodeFlag
continue;
end
%判断是否在CloseList中,如果是则不考虑
IsInCloseListFlag = false;
for j = 1:CloseList_Num
if PositionX == CloseList(j).PositionX && PositionY == CloseList(j).PositionY
IsInCloseListFlag = true;
break;
end
end
if IsInCloseListFlag
continue;
end
%计算代价函数
if abs(PositionX - Node_Father.PositionX) + abs(PositionY - Node_Father.PositionY) == 2
Cost_G = 1.4 + Node_Father.Cost_G;
else
Cost_G = 1 + Node_Father.Cost_G;
end
Cost_H = abs(PositionX - Target_Node_PositionX) + abs(PositionY - Target_Node_PositionY);
Cost_F = Cost_G + Cost_H;
%判断节点是否在OpenList,是则考虑更新,不是则加入
IsInOpenListFlag = false;
Index_InOpenList = 0;
for j = 1:OpenList_Num
if PositionX == OpenList(j).PositionX && PositionY == OpenList(j).PositionY
IsInOpenListFlag = true;
Index_InOpenList = j;
break;
end
end
if IsInOpenListFlag %如果节点已经在Openlist,则需要判断新的路径的代价函数是不是更高
if Cost_F < OpenList(Index_InOpenList).Cost_F
OpenList(Index_InOpenList).Cost_F = Cost_F;
OpenList(Index_InOpenList).Cost_G = Cost_G;
OpenList(Index_InOpenList).Father = [Node_Father.PositionX,Node_Father.PositionY];
end
else %直接加入OpenList
OpenList_Num = OpenList_Num + 1;
OpenList(OpenList_Num).PositionX = PositionX;
OpenList(OpenList_Num).PositionY = PositionY;
OpenList(OpenList_Num).Cost_G = Cost_G;
OpenList(OpenList_Num).Cost_H = Cost_H;
OpenList(OpenList_Num).Cost_F = Cost_F;
OpenList(OpenList_Num).Father = [Node_Father.PositionX,Node_Father.PositionY];
end
end
%画出OpenList和CloseList
PlotGridArea(X_Length,Y_Length,Start_Node,Target_Node,Obs_Node_List,OpenList,OpenList_Num,CloseList,CloseList_Num);
%判断OpenList是否已经出现了目标节点
ExistTargetNodeFlag = false;
for i = 1:OpenList_Num
if OpenList(i).PositionX == Target_Node_PositionX && OpenList(i).PositionY == Target_Node_PositionY
ExistTargetNodeFlag = true;
CloseList_Num = CloseList_Num + 1;%将目标节点放入CloseList以便后面处理
Target_Node_Cost_F = OpenList(i).Cost_F;
CloseList(CloseList_Num) = OpenList(i);
end
end
if ExistTargetNodeFlag %OpenList中如果出现目标点则代表搜索完成找到路径
break;
end
%判断OpenList是否为空
IsOpenListEmpty = false;
if OpenList_Num == 0
IsOpenListEmpty = true;
end
if IsOpenListEmpty %OpenList为空则代表没找到路径
break;
end
%挑出代价函数最小的子节点
Index_Min_Cost = 1;
Temp_Cost_F = OpenList(1).Cost_F;
for i = 1:OpenList_Num
if OpenList(i).Cost_F < Temp_Cost_F
Temp_Cost_F = OpenList(i).Cost_F;
Index_Min_Cost = i;
end
end
%加入CloseList并从OpenList中删除
CloseList_Num = CloseList_Num + 1;
CloseList(CloseList_Num) = OpenList(Index_Min_Cost);
for i = Index_Min_Cost:OpenList_Num
OpenList(i) = OpenList(i+1);
end
OpenList_Num = OpenList_Num - 1;
%将该节点作为父节点继续进行搜索
Node_Father = CloseList(CloseList_Num);
end
%% 循环完成后处理结果
if ExistTargetNodeFlag %OpenList中如果出现目标点则代表搜索完成找到路径,根据CloseList中的数据画出图像
PositionX = Target_Node_PositionX;
PositionY = Target_Node_PositionY;
Path_List = [Target_Node_PositionX,Target_Node_PositionY,Target_Node_Cost_F];
while 1
for i = 1:CloseList_Num % 寻找当前节点的父节点
if PositionX == CloseList(i).PositionX && PositionY == CloseList(i).PositionY
PositionX = CloseList(i).Father(1);
PositionY = CloseList(i).Father(2);
break;
end
end
for i = 1:CloseList_Num % 寻找父节点的Cost_F
if PositionX == CloseList(i).PositionX && PositionY == CloseList(i).PositionY
Cost_F = CloseList(i).Cost_F;
Path_List = [[PositionX,PositionY,Cost_F];Path_List];
break;
end
end
if PositionX == Start_Node_PositionX && PositionY == Start_Node_PositionY
break;
end
end
PlotPath(X_Length,Y_Length,Start_Node,Target_Node,Obs_Node_List,Path_List)
elseif IsOpenListEmpty %OpenList为空则代表没找到路径
msgbox('未搜索到路径!');
end
end
%% 画出每次搜索后的OpenList和CloseList
function PlotGridArea(X_Length,Y_Length,Start_Node,Target_Node,Obs_Node_List,OpenList,OpenList_Num,CloseList,CloseList_Num)
figure(1);
% 画网格线
for x = 1:X_Length
plot([x,x],[0,Y_Length],'black');
hold on;
end
for y = 1:Y_Length
plot([0,X_Length],[y,y],'black');
hold on;
end
%坐标轴调整
axis equal;
axis([0,X_Length,0,Y_Length]);
%Start_Node
Start_Node_X = Start_Node(1);
Start_Node_Y = Start_Node(2);
fill([Start_Node_X,Start_Node_X,Start_Node_X-1,Start_Node_X-1,Start_Node_X],[Start_Node_Y,Start_Node_Y-1,Start_Node_Y-1,Start_Node_Y,Start_Node_Y],'yellow');
%Target_Node
Target_Node_X = Target_Node(1);
Target_Node_Y = Target_Node(2);
fill([Target_Node_X,Target_Node_X,Target_Node_X-1,Target_Node_X-1,Target_Node_X],[Target_Node_Y,Target_Node_Y-1,Target_Node_Y-1,Target_Node_Y,Target_Node_Y],'green');
%Obs_Node
for i = 1:length(Obs_Node_List)
Obs_Node_X = Obs_Node_List(i,1);
Obs_Node_Y = Obs_Node_List(i,2);
fill([Obs_Node_X,Obs_Node_X,Obs_Node_X-1,Obs_Node_X-1,Obs_Node_X],[Obs_Node_Y,Obs_Node_Y-1,Obs_Node_Y-1,Obs_Node_Y,Obs_Node_Y],'black');
end
%CloseList
for i = 1:CloseList_Num
Close_Node = CloseList(i);
if Close_Node.PositionX == Start_Node(1) && Close_Node.PositionY == Start_Node(2)%如果是Start_Node就不当作CloseNode画
continue;
elseif Close_Node.PositionX == Target_Node(1) && Close_Node.PositionY == Target_Node(2)%如果是Target_Node就不当作CloseNode画
continue;
end
Close_Node_X = Close_Node.PositionX;
Close_Node_Y = Close_Node.PositionY;
fill([Close_Node_X,Close_Node_X,Close_Node_X-1,Close_Node_X-1,Close_Node_X],[Close_Node_Y,Close_Node_Y-1,Close_Node_Y-1,Close_Node_Y,Close_Node_Y],'blue');
end
%OpenList
for i = 1:OpenList_Num
Open_Node = OpenList(i);
if Open_Node.PositionX == Start_Node(1) && Open_Node.PositionY == Start_Node(2)%如果是Start_Node就不当作OpenNode画
continue;
elseif Open_Node.PositionX == Target_Node(1) && Open_Node.PositionY == Target_Node(2)%如果是Target_Node就不当作OpenNode画
continue;
end
Open_Node_X = Open_Node.PositionX;
Open_Node_Y = Open_Node.PositionY;
fill([Open_Node_X,Open_Node_X,Open_Node_X-1,Open_Node_X-1,Open_Node_X],[Open_Node_Y,Open_Node_Y-1,Open_Node_Y-1,Open_Node_Y,Open_Node_Y],'red');
end
end
%% 搜索出路径后,通过画图画出来
function PlotPath(X_Length,Y_Length,Start_Node,Target_Node,Obs_Node_List,Path_List)
figure(2);
% 画网格线
for x = 1:X_Length
plot([x,x],[0,Y_Length],'black');
hold on;
end
for y = 1:Y_Length
plot([0,X_Length],[y,y],'black');
hold on;
end
%坐标轴调整
axis equal;
axis([0,X_Length,0,Y_Length]);
%Start_Node
Start_Node_X = Start_Node(1);
Start_Node_Y = Start_Node(2);
fill([Start_Node_X,Start_Node_X,Start_Node_X-1,Start_Node_X-1,Start_Node_X],[Start_Node_Y,Start_Node_Y-1,Start_Node_Y-1,Start_Node_Y,Start_Node_Y],'yellow');
%Target_Node
Target_Node_X = Target_Node(1);
Target_Node_Y = Target_Node(2);
fill([Target_Node_X,Target_Node_X,Target_Node_X-1,Target_Node_X-1,Target_Node_X],[Target_Node_Y,Target_Node_Y-1,Target_Node_Y-1,Target_Node_Y,Target_Node_Y],'green');
%Obs_Node
for i = 1:length(Obs_Node_List)
Obs_Node_X = Obs_Node_List(i,1);
Obs_Node_Y = Obs_Node_List(i,2);
fill([Obs_Node_X,Obs_Node_X,Obs_Node_X-1,Obs_Node_X-1,Obs_Node_X],[Obs_Node_Y,Obs_Node_Y-1,Obs_Node_Y-1,Obs_Node_Y,Obs_Node_Y],'black');
end
%Path_List
plot(Path_List(:,1)-0.5,Path_List(:,2)-0.5,'*');
plot(Path_List(:,1)-0.5,Path_List(:,2)-0.5,'-');
%Cost_F
for i = 1:size(Path_List,1)
PositionX = Path_List(i,1);
PositionY = Path_List(i,2);
Cost_F = Path_List(i,3);
text(PositionX - 1,PositionY - 0.2,num2str(Cost_F));
end
end
几个月前,我读了一篇关于rubygem的博客文章,它可以通过阅读代码本身来确定编程语言。对于我的生活,我不记得博客或gem的名称。谷歌搜索“ruby编程语言猜测”及其变体也无济于事。有人碰巧知道相关gem的名称吗? 最佳答案 是这个吗:http://github.com/chrislo/sourceclassifier/tree/master 关于ruby-寻找通过阅读代码确定编程语言的rubygem?,我们在StackOverflow上找到一个类似的问题:
matlab打开matlab,用最简单的imread方法读取一个图像clcclearimg_h=imread('hua.jpg');返回一个数组(矩阵),往往是a*b*cunit8类型解释一下这个三维数组的意思,行数、数和层数,unit8:指数据类型,无符号八位整形,可理解为0~2^8的数三个层数分别代表RGB三个通道图像rgb最常用的是24-位实现方法,即RGB每个通道有256色阶(2^8)。基于这样的24-位RGB模型的色彩空间可以表现256×256×256≈1670万色当imshow传入了一个二维数组,它将以灰度方式绘制;可以把图像拆分为rgb三层,可以以灰度的方式观察它figure(1
目录一.加解密算法数字签名对称加密DES(DataEncryptionStandard)3DES(TripleDES)AES(AdvancedEncryptionStandard)RSA加密法DSA(DigitalSignatureAlgorithm)ECC(EllipticCurvesCryptography)非对称加密签名与加密过程非对称加密的应用对称加密与非对称加密的结合二.数字证书图解一.加解密算法加密简单而言就是通过一种算法将明文信息转换成密文信息,信息的的接收方能够通过密钥对密文信息进行解密获得明文信息的过程。根据加解密的密钥是否相同,算法可以分为对称加密、非对称加密、对称加密和非
网络编程套接字网络编程基础知识理解源`IP`地址和目的`IP`地址理解源MAC地址和目的MAC地址认识端口号理解端口号和进程ID理解源端口号和目的端口号认识`TCP`协议认识`UDP`协议网络字节序socket编程接口`sockaddr``UDP`网络程序服务器端代码逻辑:需要用到的接口服务器端代码`udp`客户端代码逻辑`udp`客户端代码`TCP`网络程序服务器代码逻辑多个版本服务器单进程版本多进程版本多线程版本线程池版本服务器端代码客户端代码逻辑客户端代码TCP协议通讯流程TCP协议的客户端/服务器程序流程三次握手(建立连接)数据传输四次挥手(断开连接)TCP和UDP对比网络编程基础知识
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
动漫制作技巧是很多新人想了解的问题,今天小编就来解答与大家分享一下动漫制作流程,为了帮助有兴趣的同学理解,大多数人会选择动漫培训机构,那么今天小编就带大家来看看动漫制作要掌握哪些技巧?一、动漫作品首先完成草图设计和原型制作。设计草图要有目的、有对象、有步骤、要形象、要简单、符合实际。设计图要一致性,以保证制作的顺利进行。二、原型制作是根据设计图纸和制作材料,可以是手绘也可以是3d软件创建。在此步骤中,要注意的问题是色彩和平面布局。三、动漫制作制作完成后,加工成型。完成不同的表现形式后,就要对设计稿进行加工处理,使加工的难易度降低,并得到一些基本准确的概念,以便于后续的大样、准确的尺寸制定。四、
我完全不是程序员,正在学习使用Ruby和Rails框架进行编程。我目前正在使用Ruby1.8.7和Rails3.0.3,但我想知道我是否应该升级到Ruby1.9,因为我真的没有任何升级的“遗留”成本。缺点是什么?我是否会遇到与普通gem的兼容性问题,或者甚至其他我不太了解甚至无法预料的问题? 最佳答案 你应该升级。不要坚持从1.8.7开始。如果您发现不支持1.9.2的gem,请避免使用它们(因为它们很可能不被维护)。如果您对gem是否兼容1.9.2有任何疑问,您可以在以下位置查看:http://www.railsplugins.or
我创建了一个由于“在运行时执行的单例元类定义”而无法编码的对象(这段代码的描述是否正确?)。这是通过以下代码执行的:#defineclassXthatmyusesingletonclassmetaprogrammingfeatures#throughcallofmethod:break_marshalling!classXdefbreak_marshalling!meta_class=class我该怎么做才能使对象编码正确?是否可以从对象instance_of_x的classX中“移除”单例组件?我真的需要一个建议,因为我们的一些对象需要通过Marshal.dump序列化机制进行缓存。
我正在查看Ruby日志记录库Logging.logger方法并从sourceatgithub提出问题与这段代码有关:logger=::Logging::Logger.new(name)logger.add_appendersappenderlogger.additive=falseclass我知道类 最佳答案 这实际上删除了方法(当它实际被执行时)。这是确保close不会被调用两次的保障措施。看起来好像有嵌套的“class 关于Ruby元编程问题,我们在StackOverflow上找到一
使用Paperclip,我想从这样的URL抓取图像:require'open-uri'user.photo=open(url)问题是我最后得到一个像“open-uri20110915-4852-1o7k5uw”这样的文件名。有什么方法可以更改user.photo上的文件名?作为一个额外的变化,Paperclip将我的文件存储在S3上,所以如果我可以在初始分配中设置我想要的文件名就更好了,这样图像就会上传到正确的S3key。像这样:user.photo=open(url),:filename=>URI.parse(url).path 最佳答案