本期分享Zynq-7010/20工业开发板(双核ARM Cortex-A9+A7)的参数规格资料,其中包含软硬件、原理图、工业温度等均有。
测试板卡是一款基于Xilinx Zynq-7000系列XC7Z010/XC7Z020高性能低功耗处理器设计的异构多核SoC工业级核心板,处理器集成PS端双核ARM Cortex-A9 + PL端Artix-7架构28nm可编程逻辑资源。核心板内部集成USB PHY芯片,通过邮票孔连接方式引出千兆网口、USB、CAN、UART等通信接口,可通过PS端加载PL端程序,且PS端和PL端可独立开发。核心板经过专业的PCB Layout和高低温测试验证,稳定可靠,可满足各种工业应用环境。
SOM-TLZ7x-S核心板板载CPU、ROM、RAM、USB PHY、晶振、电源、LED等硬件资源,并通过邮票孔连接方式引出IO。

图 1 核心板硬件框图
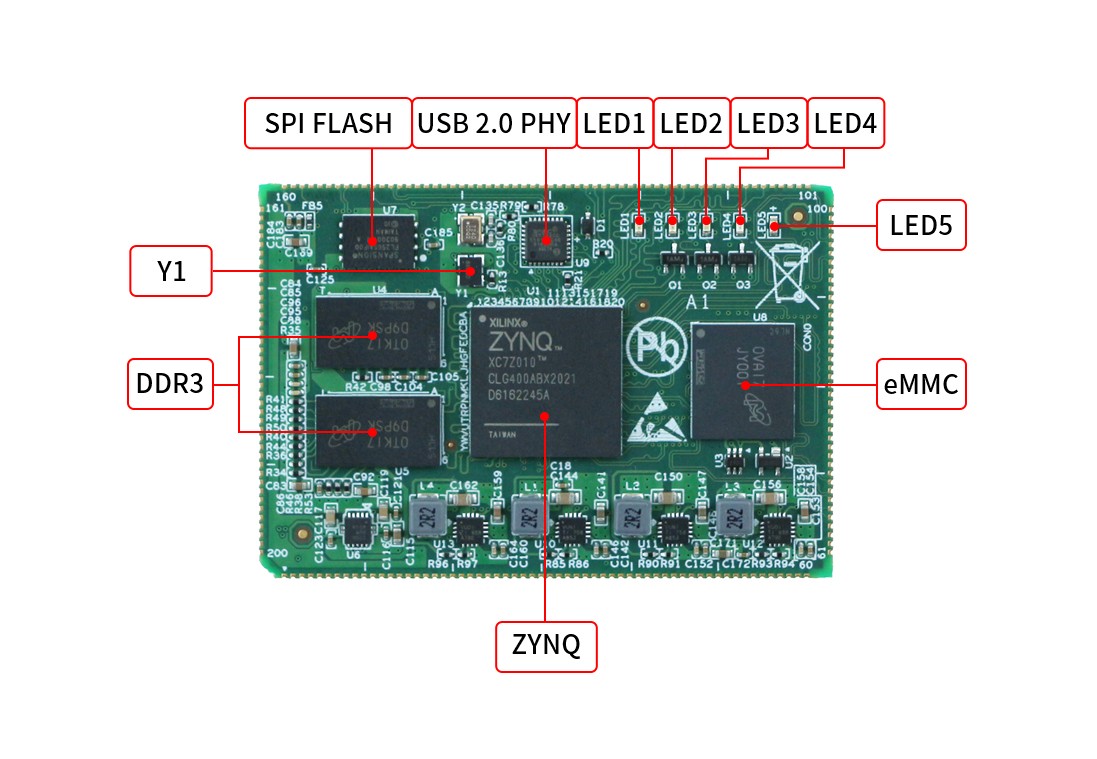
图 2
核心板CPU型号兼容XC7Z010-2CLG400I/XC7Z020-2CLG400I,CLG400封装,工作温度范围为-40°C~100°C,引脚数量为400个,尺寸为17mm*17mm。
CPU功能框图、资源列表如下。
📢博客主页:https://blog.csdn.net/weixin_43197380📢欢迎点赞👍收藏⭐留言📝如有错误敬请指正!📢本文由Loewen丶原创,首发于CSDN,转载注明出处🙉📢现在的付出,都会是一种沉淀,只为让你成为更好的人✨文章预览:一.分辨率(Resolution)1、工业相机的分辨率是如何定义的?2、工业相机的分辨率是如何选择的?二.精度(Accuracy)1、像素精度(PixelAccuracy)2、定位精度和重复定位精度(RepeatPrecision)三.公差(Tolerance)四.课后作业(Post-ClassExercises)视觉行业的初学者,甚至是做了1~2年
我正在尝试为ChefRecipe编写一个库,以简化一些常见的搜索。例如,我希望能够在cookbook/libraries/library.rb中执行类似的操作,然后从同一Recipe中的Recipe中使用它:moduleExampledefself.search_attribute(attribute_name)returnsearch(:nodes,node[attribute_name])endend问题是,在Chef库文件中,node对象或search函数都不可用。似乎可以使用Chef::Search::Query.new().search(...)进行搜索,但我找不到任何可以访
最近玩步进电机时候,发现步进电机驱动种类多;A4988,drv8825,tb6600,lv8731……;tb6600驱动电流可达4A,1600细分,十分强大,但是体积大,用在平衡车上不太合适。drv8825加散热器驱动电流可达2.5A,32细分,还不错。芯片介绍这里的介绍只介绍其引脚连接。如图是它的说明书中对引脚的解释在这里把它翻译成中文。 为了方便大家使用,说明书还给出了一种典型的连接方式 这样初始化好之后,将AOUT1、AOUT2、BOUT1、BOUT2分别连接到步进电机对应信号线,AOUT1与AOUT2同相,BOUT1与BOUT2同相。判断步进电机信号线是否同相的一个方法是将其中两条接
我是ruby和Chef的新手。我一直在开发Recipe,提交它们,将它们上传到Chef服务器,然后通过角色更改将它们部署到Chef客户端,然后在客户端上运行“chef-client”。这个过程很慢。我如何使用IDE(在我的例子中是Eclipse)开发Recipe并能够调试(设置断点、观察变量等)并运行它们,而无需将它们上传到Chef服务器,然后使用Chef-客户运行?我将Eclipse3.7Indigo与“动态语言工具包-Ruby开发工具3.0.0.v20110424-7Z--E_EkMYXO4k101442”插件一起使用我正在使用10.xChef代码行开发OpscodeChef说
项目场景Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。 Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。 Baumer堡盟VCX相机为堡盟全系列相机中的主流常用相机,性能强大、坚固可靠,易于集成,常用与一般行业的检测定位识别使用。问题描述工业相机的触发有多种方式:1.硬件触发:使用外部硬件设备来触发相机,如传感器或开关。2.软件触发:使用软件来触发相机,可以是手动的也可以是自动的。3.同步触发:使相机的触发与其他设备或系
1.准备工具自行安装linux版本的vivado,和xilinx开发环境。linux版本我选择的是Ubuntu18.04,ubuntu系统下xilinx开发环境我安装的是vivado2018.3(安装时候要记得勾选SDK),安装好vivado后也就包含了xilinx的ARM部分交叉编译器。2.Petalinux工具安装petalinux并不是一个特殊Linux内核,而是一套开发环境配置的工具,降低uboot、内核、根文件系统的配置的工作量,可以从Vivado的导出硬件信息自动完成相关软件的配置,安装版本为petalinux-v2018.3注:vivado配置zynq硬核配置部分参考ZYNQ70
1、ZYNQ启动流程简介ZYNQ启动系统流程与传统FPGA有所不同,传统FPGA只需要将bin文件或者mcs文件烧写到FLASH中,上电就能自动运行FPGA程序。ZYNQ需要烧写Boot.bin文件(包含fsbl、PS程序、PL程序)。如图所示,ZYNQ上有一块固定的只读存储器——BootRom,每次开机时都会自动运行其中代码,通过外围引脚配置BootRom的寄存器,可以实现开机启动模式配置。BootRom从配置的存储设备中加载运行FSBL。之后,FSBL会加载uboot,然后u-boot加载操作系统内核运行,并挂载根文件系统。图1ZYNQ启动流程Bit文件加载可以在FSBL后、u-boot后
ChatGPT是美国人工智能实验室OpenAI推出的一款训练相对成熟的自然语言处理工具,该工具使用Transformer神经网络架构来训练,该架构拥有语言理解和文本生成能力,通过与语料库连来学习和优化模型,进而让其能更准确地实现互动,有趣的是,基于大量现有数据库,该工具甚至能完成类似于邮件、脚本、文案、代码等内容的编写工作。最新动态该软件于2022年11月底在OpenAI的官网被推出,一经推出即在社交媒体走红,并收获众多注册用户,2023年一月末,ChatGPT的月活用户已突破1亿,而这进一步帮助该工具训练模型。在此之后,ChatGPT表现出优秀的问答回应能力吸引了众多巨头的关注和跟进,据报告
我迷失在V8源代码以及有关该主题的文章中,我偶然发现了一篇博文,其中指出:Ifyouareforcedtofillupanarraywithheterogeneouselements,letV8knowearlyonbyusinganarrayliteralespeciallywithfixed-sizesmallarrays.letarray=[77,88,0.5,true];//V8knowstonotallocatemultipletimes.如果这是真的,那么为什么它是真的?为什么是数组字面量?与通过构造函数创建数组相比,这有什么特别之处?作为V8源的新手,很难找出同构/异构阵
Libero下载网盘下载官网下载License申请环境变量配置网盘下载不想去官网下载的可以直接使用次链接下载链接:https://pan.baidu.com/s/1DinqpUVjsS_VLE1YlwCcwQ?pwd=jwz1提取码:jwz1–来自百度网盘超级会员V2的分享官网下载首先我们打开官网:https://www.microsemi.com/选择FPGA&SOC选择FPGA&SocDesignTOOLS再选择FPGADesignTools选择LiberoSocv11.9andearller选择下载第一次点击下载会跳转到登陆界面,按照步骤注册就行License申请要使用Libero软件需