PMSM 无位置传感器控制主要分为两类:一种是在中高速范围内利用反电动势和电角速度的关系,通过计算反电动势获取转子位置信息,例如磁链观测器,模型参考自适应法,扩展卡尔曼滤波器和滑模观测器。另一种是利用电机凸极效应的高频注入法,包括脉振高频电流注入法、旋转高频电压注入法和脉振高频电压注入法,后两种方法与基本数学方程无关,它对电机参数不敏感,具有更好的鲁棒性。
在零低速环境下,基波模型中有关位置的反电动势信号很微弱,提取时信噪比过低,此时实现无位置传感器控制可利用电机的高频激励模型,通过注入高频信号再提取高频响应中的位置信号即可,高频注入法主要以旋转高频电压注入法和脉振高频电压注入法两种为主。
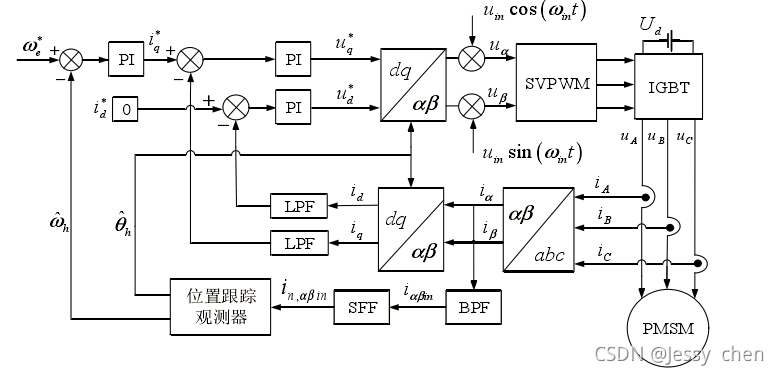
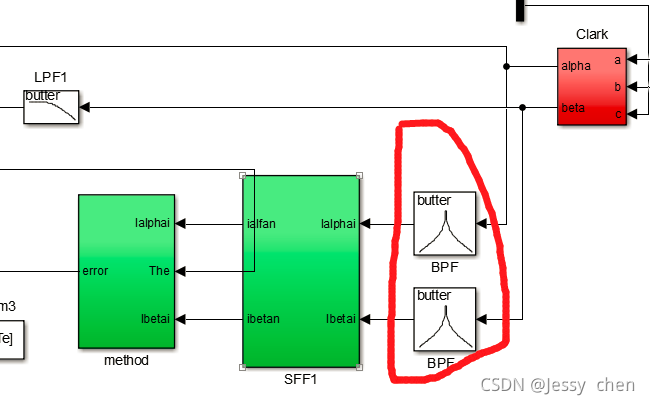
旋转高频电压注入法在两相静止坐标系( a-β)下,分别向α轴和β轴注入高频电压信号,然后通过带通滤波器(BPF)检测电机的高频电流响应,高频电流响应中包含正序分量和负序分量,只有负序分量的相位中可以提取位置信号,再使用同步轴系高通滤波器(SFF)滤除正序分量,最后获取转子的位置和速度信息,这种方法实现较容易,低速时性能较好[。旋转高频电压注入法在低速下抗扰性较好,但同时也受到滤波器延时和 DSP信号采集、控制延时的影响,转子估算相位会有延迟。针对延时问题通常采用一种补偿算法,从高频正序电流分量中提取误差量,用以对转子位置辨识误差进行补偿,以提高位置辨识精度
基于旋转高频注入法的永磁同步电机无位置传感器控制系统框图如下:
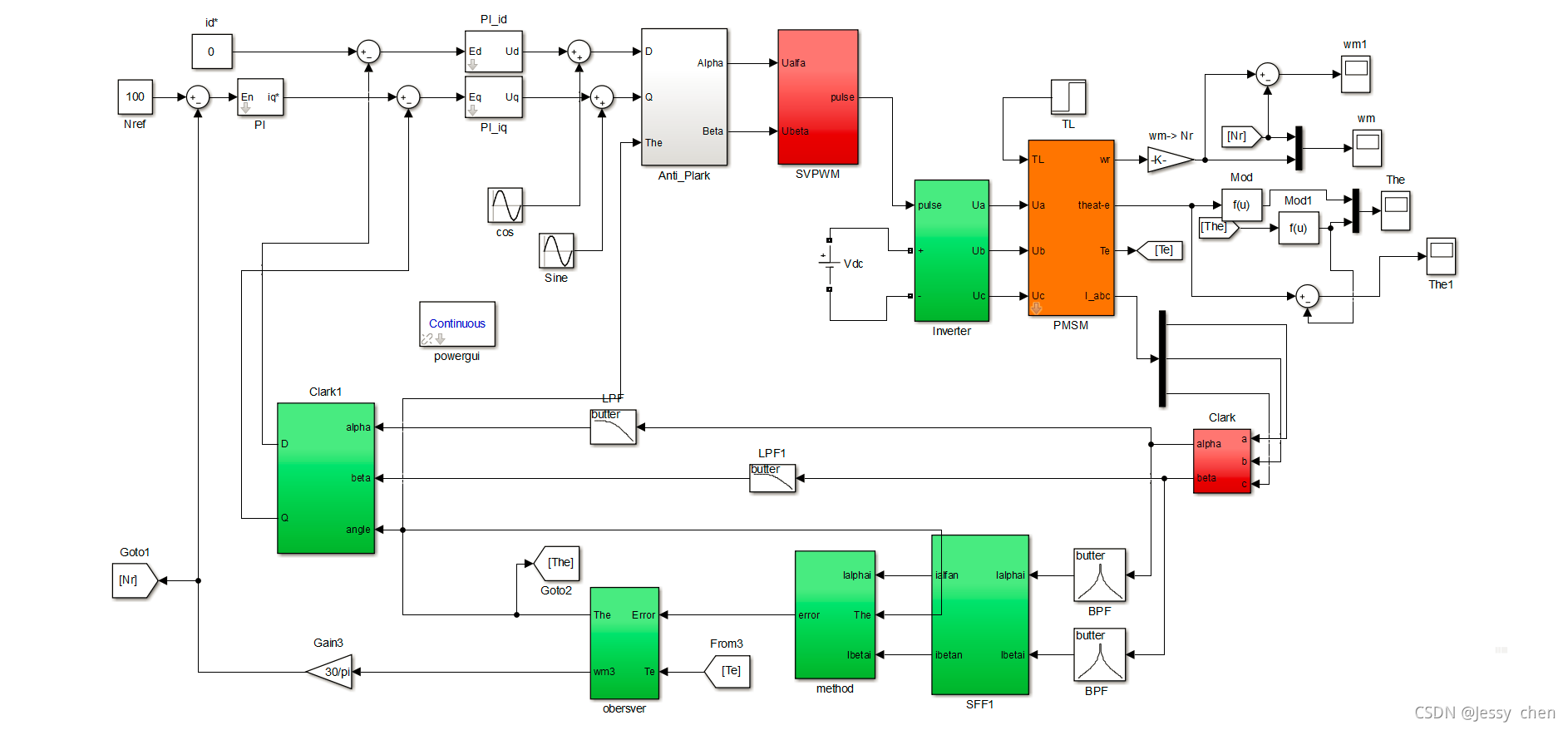
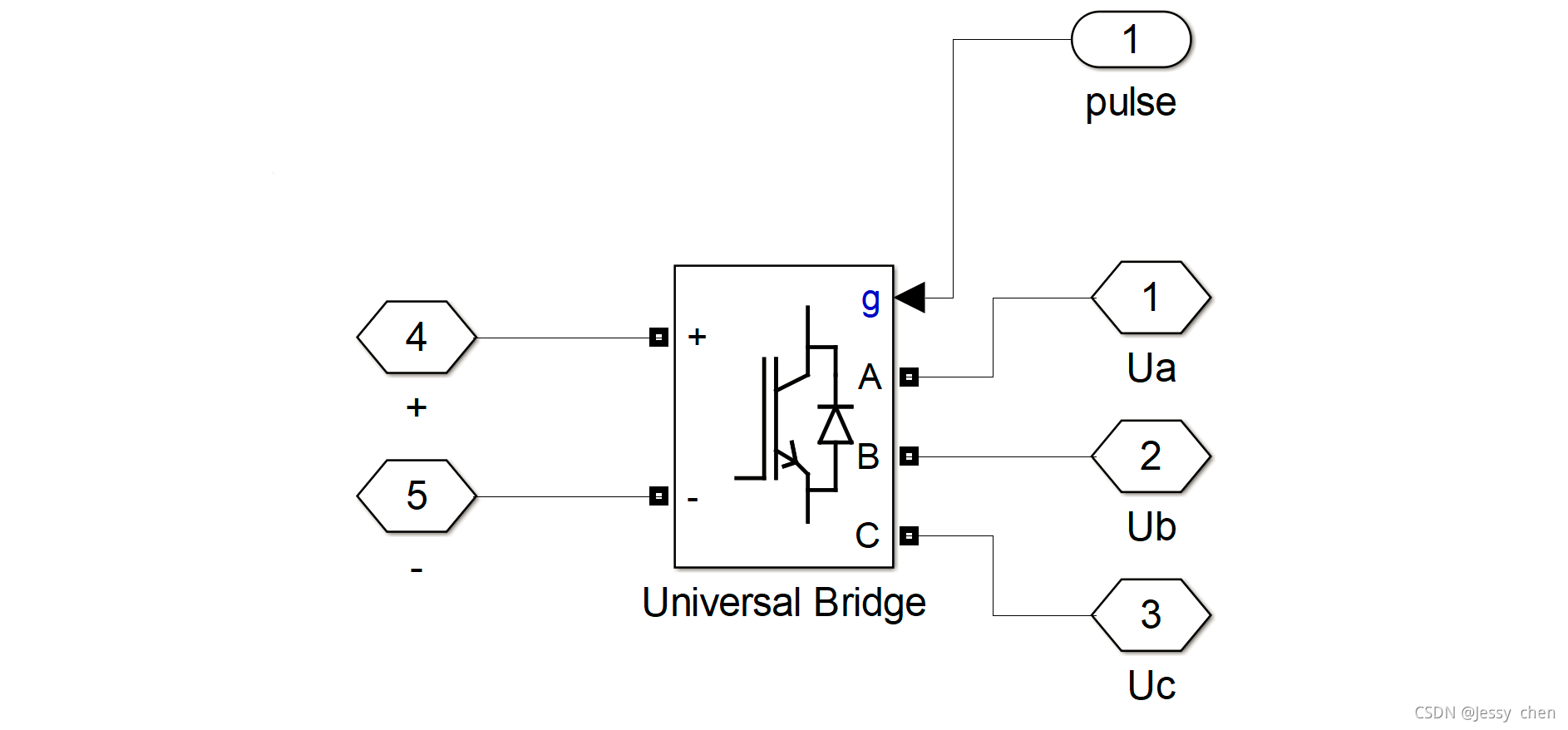
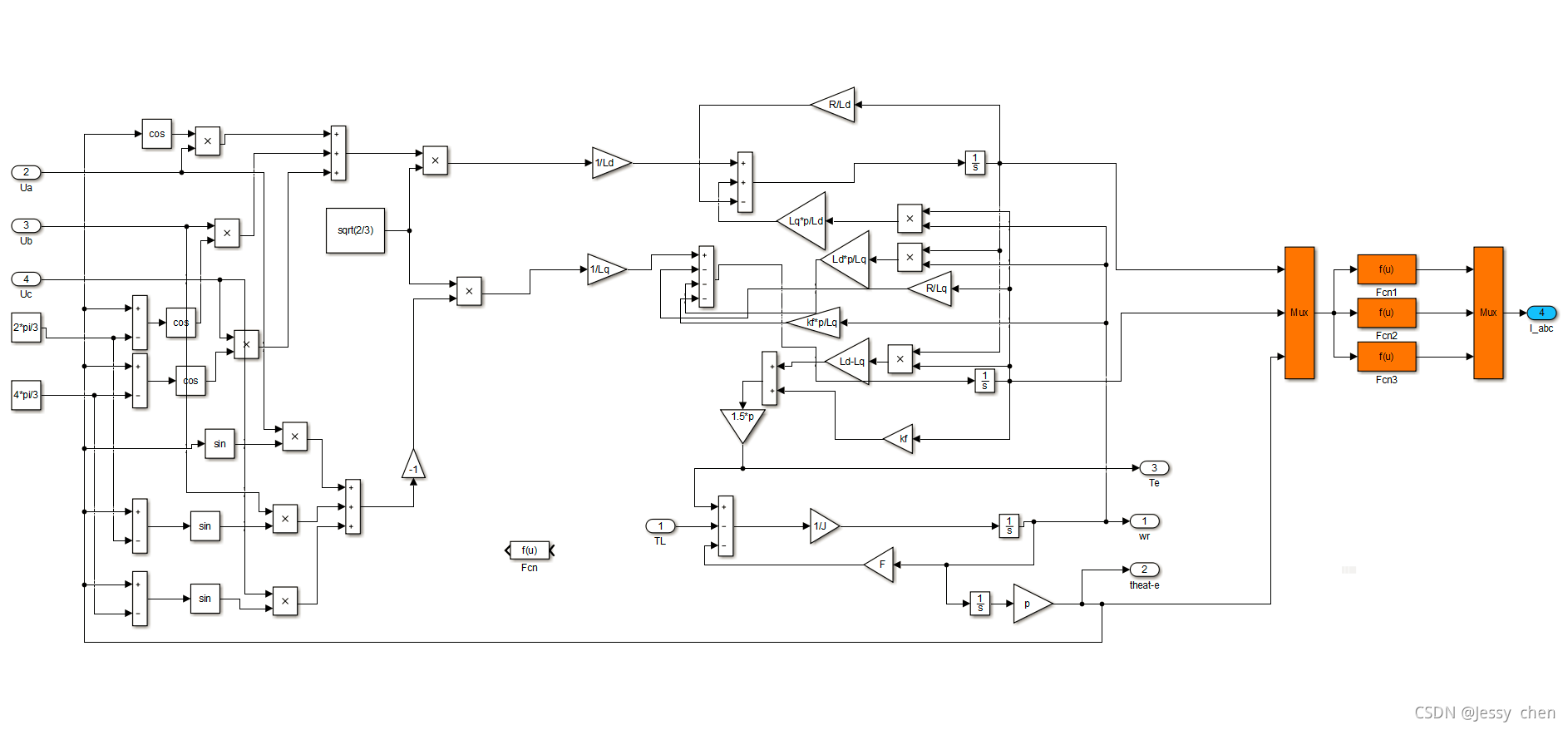
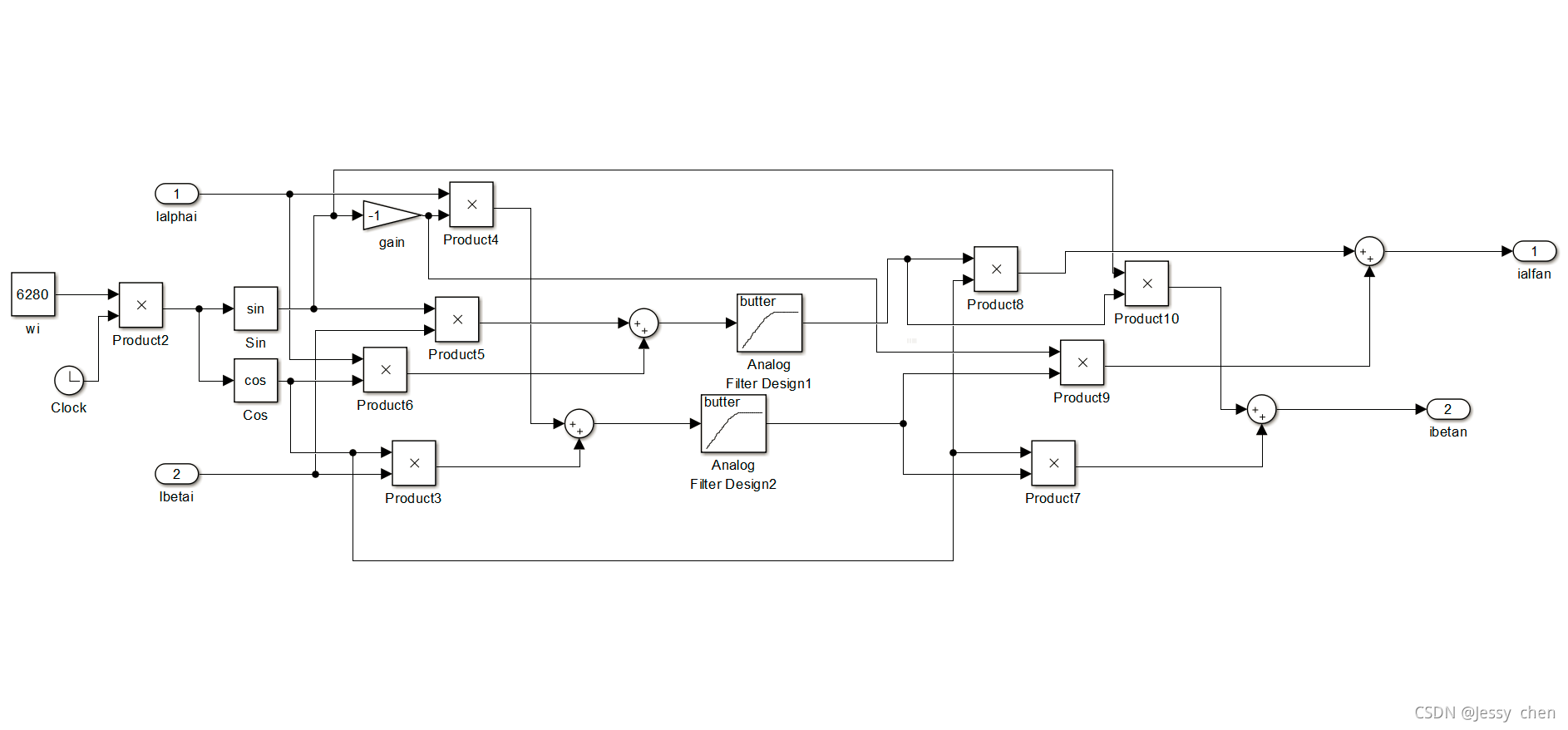
 此框图在matlab/simulink中搭建如下图所示:
此框图在matlab/simulink中搭建如下图所示:
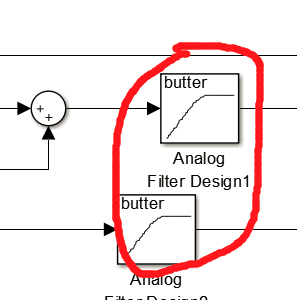
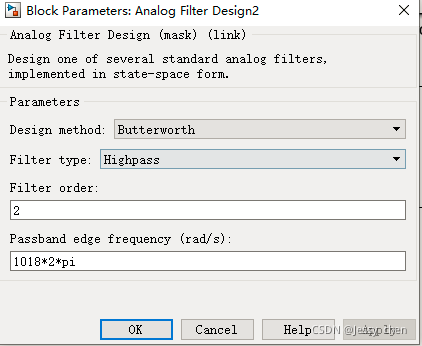
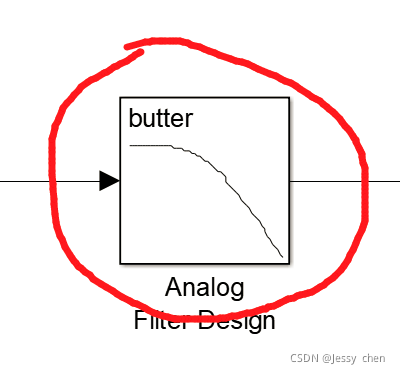
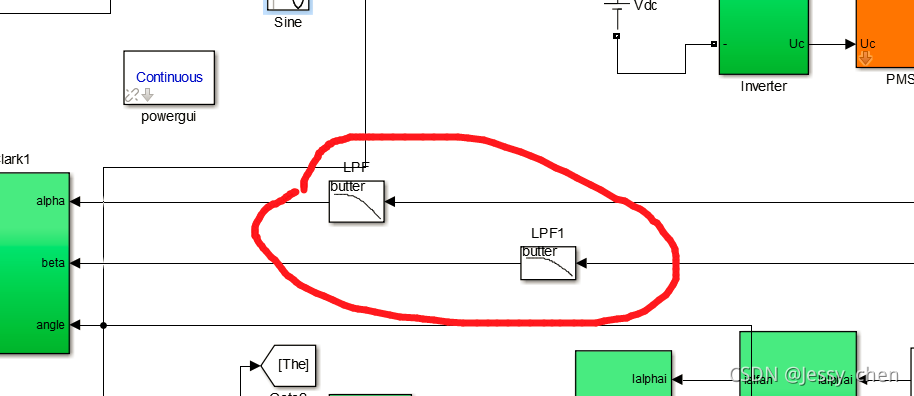
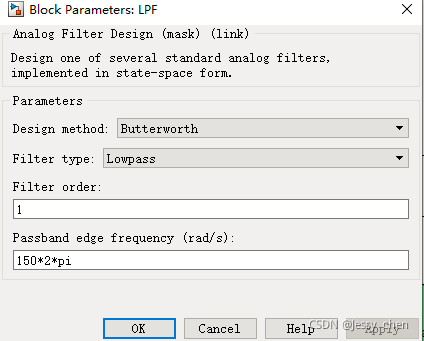
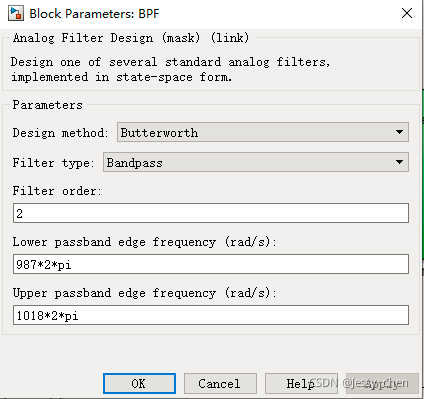
 为了提取负相序高频电流响应中的转子位置信息,必须很好地滤除电机端电流中的基频电流﹑低次谐波电流、PWM开关频率谐波电流以及正相序高频电流等信号。基波电流与高频电流幅值相差很大,载波频率远比注入高频频率高,这两者都可以通过常规的带通滤波器(BPF)予以滤除。载波电流正相序分量与负相序分量的旋转方向相反,因此可通过同步轴系高通滤波器(Synchronous Frame Filter,SFF)将正序电流成分滤除。
为了提取负相序高频电流响应中的转子位置信息,必须很好地滤除电机端电流中的基频电流﹑低次谐波电流、PWM开关频率谐波电流以及正相序高频电流等信号。基波电流与高频电流幅值相差很大,载波频率远比注入高频频率高,这两者都可以通过常规的带通滤波器(BPF)予以滤除。载波电流正相序分量与负相序分量的旋转方向相反,因此可通过同步轴系高通滤波器(Synchronous Frame Filter,SFF)将正序电流成分滤除。
同步轴系高通滤波器通过坐标变换把高频电流矢量变换到一个与注入的高频电压矢量同步旋转的参考坐标系中,此时正相序高频电流矢量变成直流,很容易通过常规的高通滤波器将其滤除。
经过滤波后,剩下的信号为负相序高频电流分量,这是一个可以被用来跟踪凸极的有用信号,其矢量表达式为:

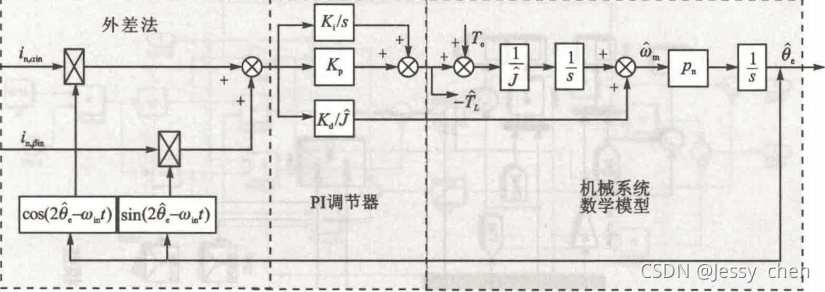
为了从负序高频电流分量中提取转子位置信息,目前常用的是转子位置跟踪观测器方法。其实现框图如下:
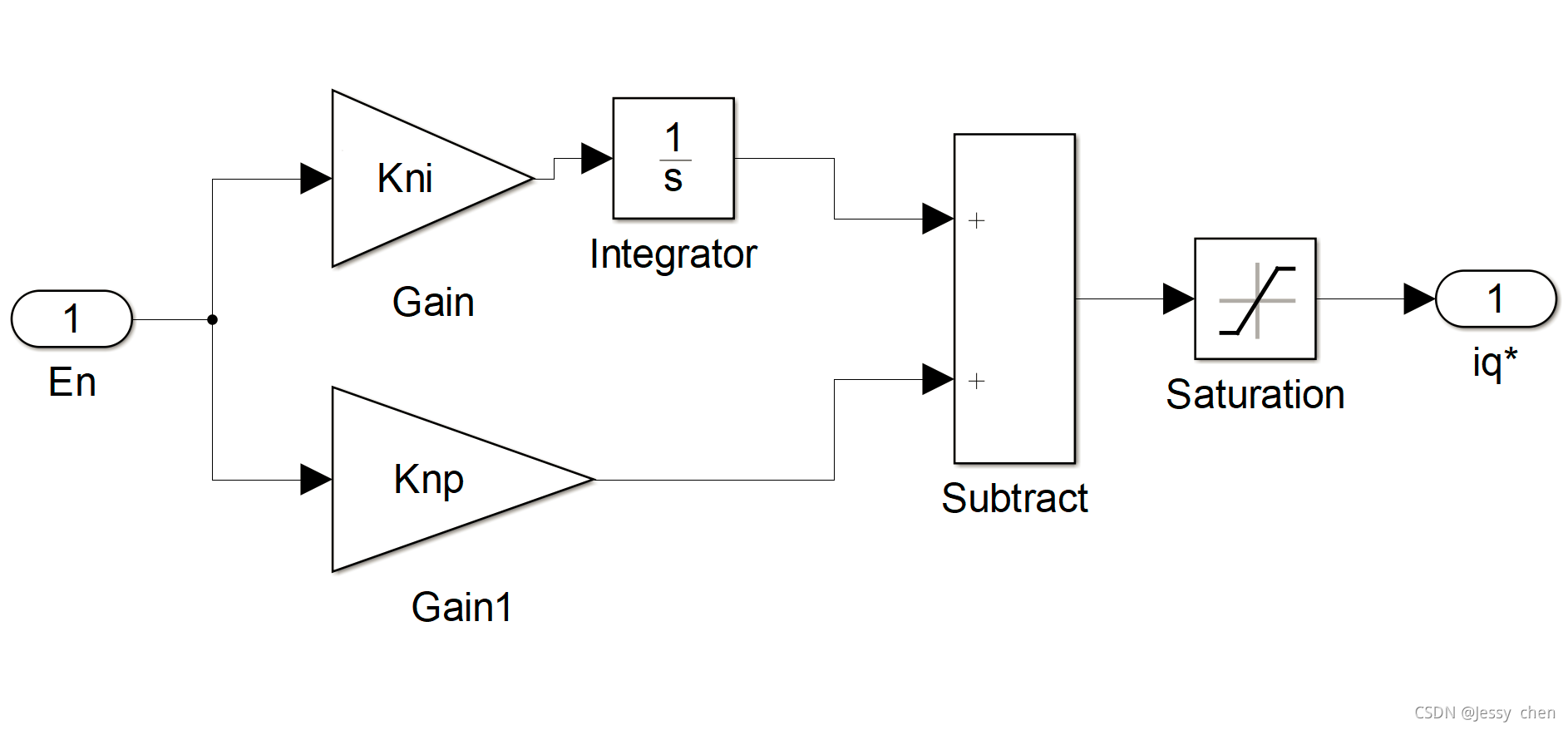
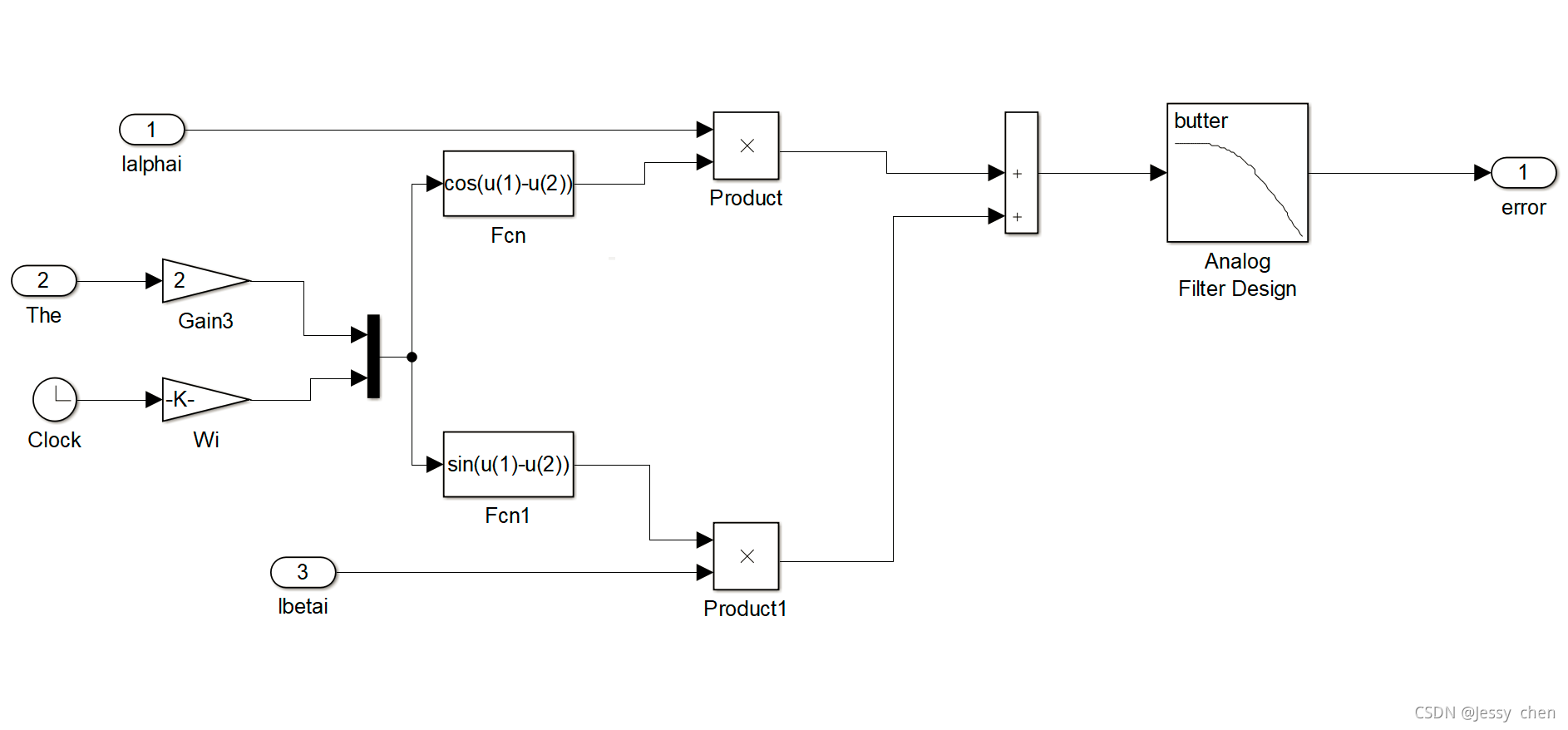
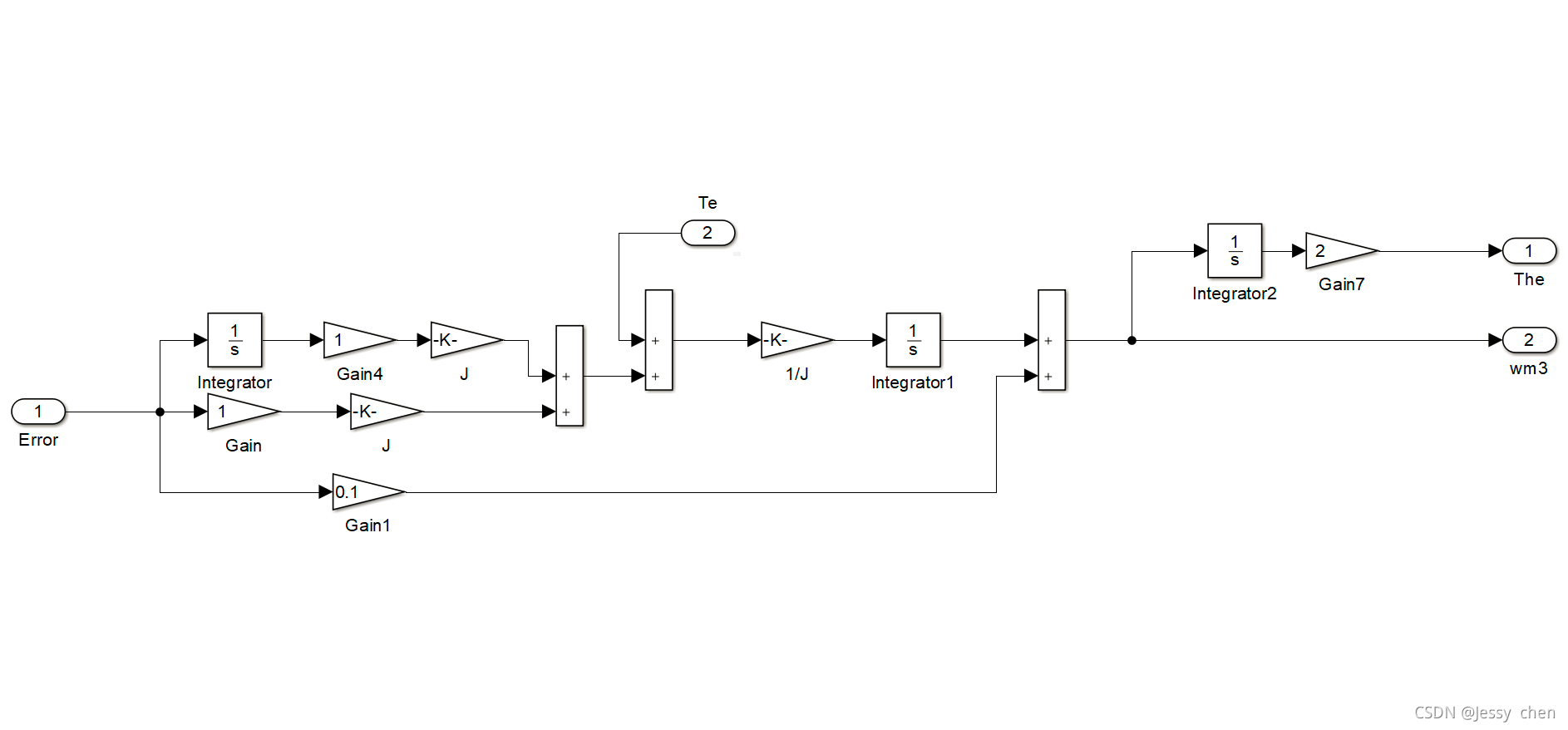
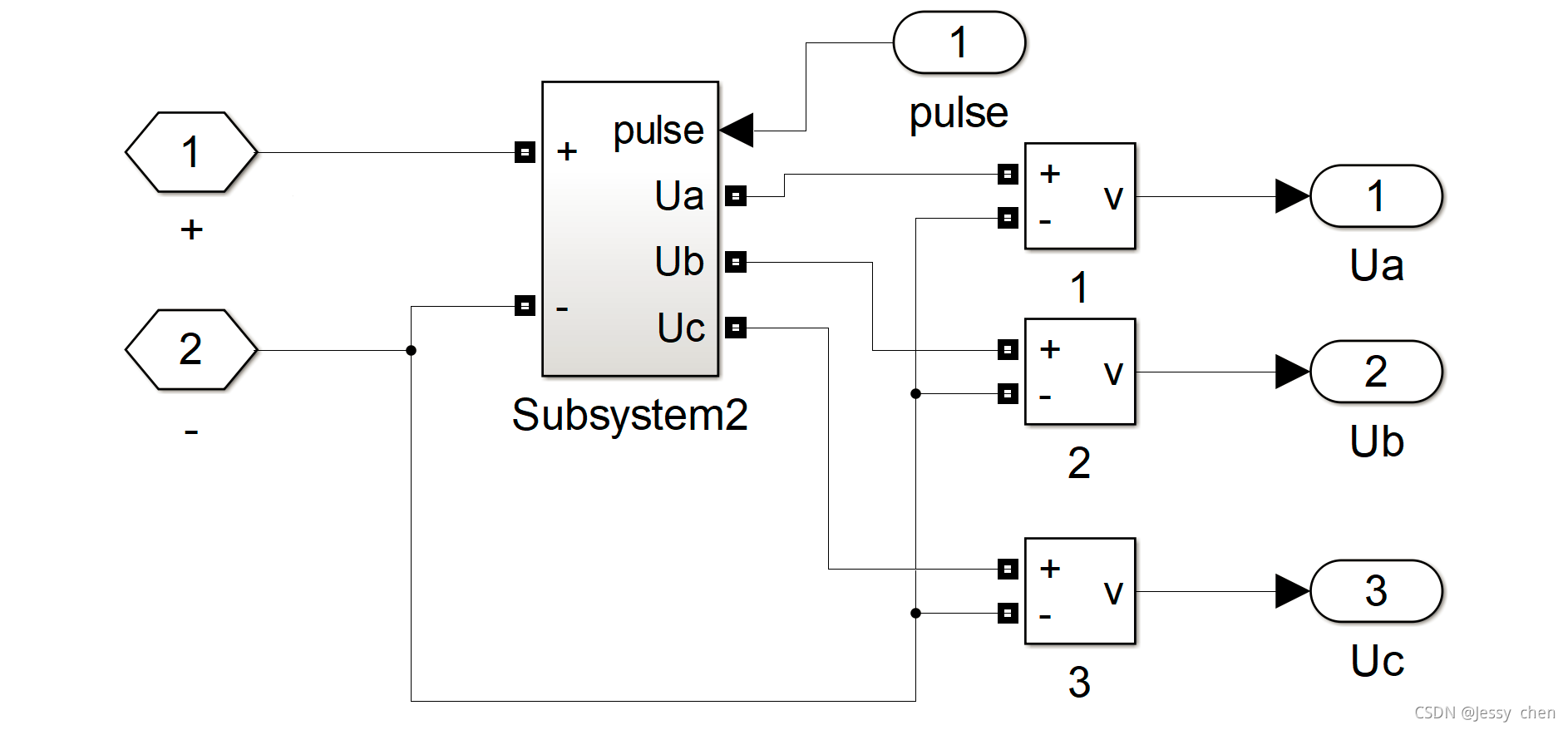 其中subsystem2模块为:
其中subsystem2模块为:
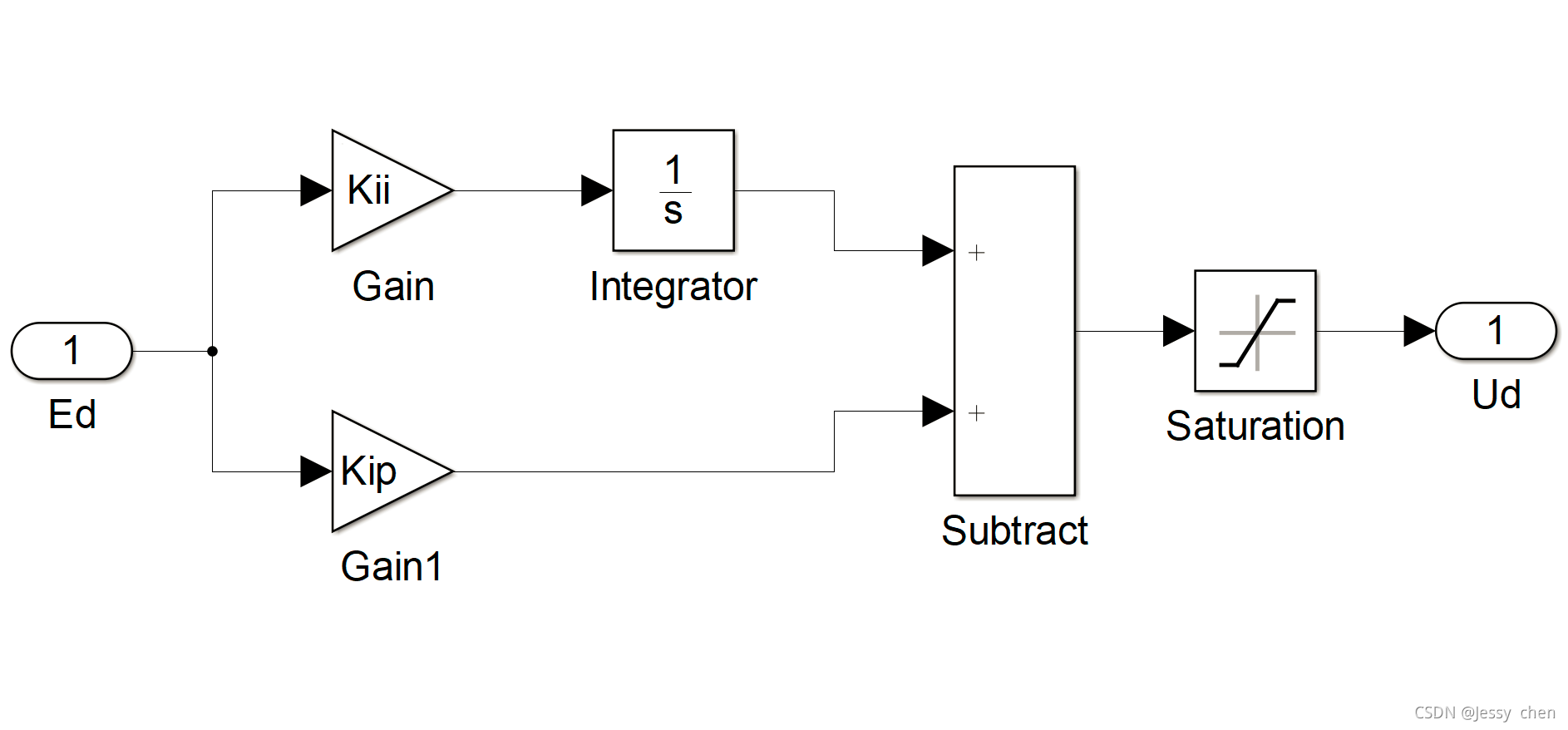
 其中
其中
 其中
其中
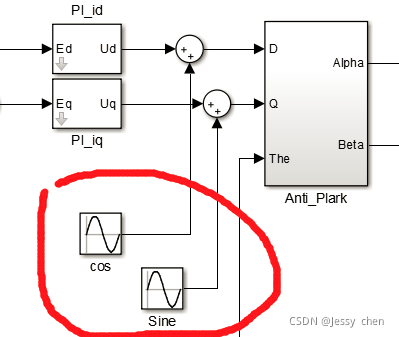
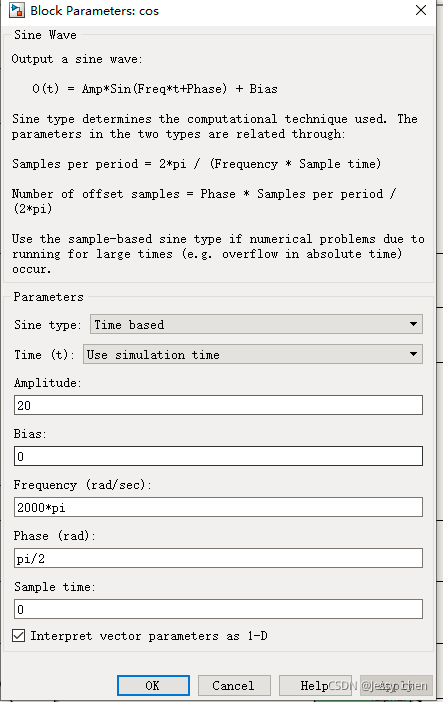
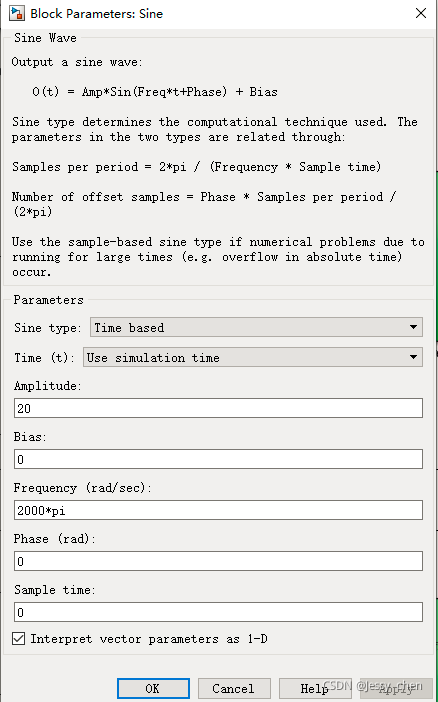
其中一个是sin,另一个是cos
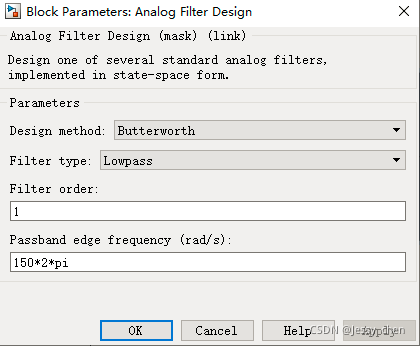
cos参数:
sin参数:
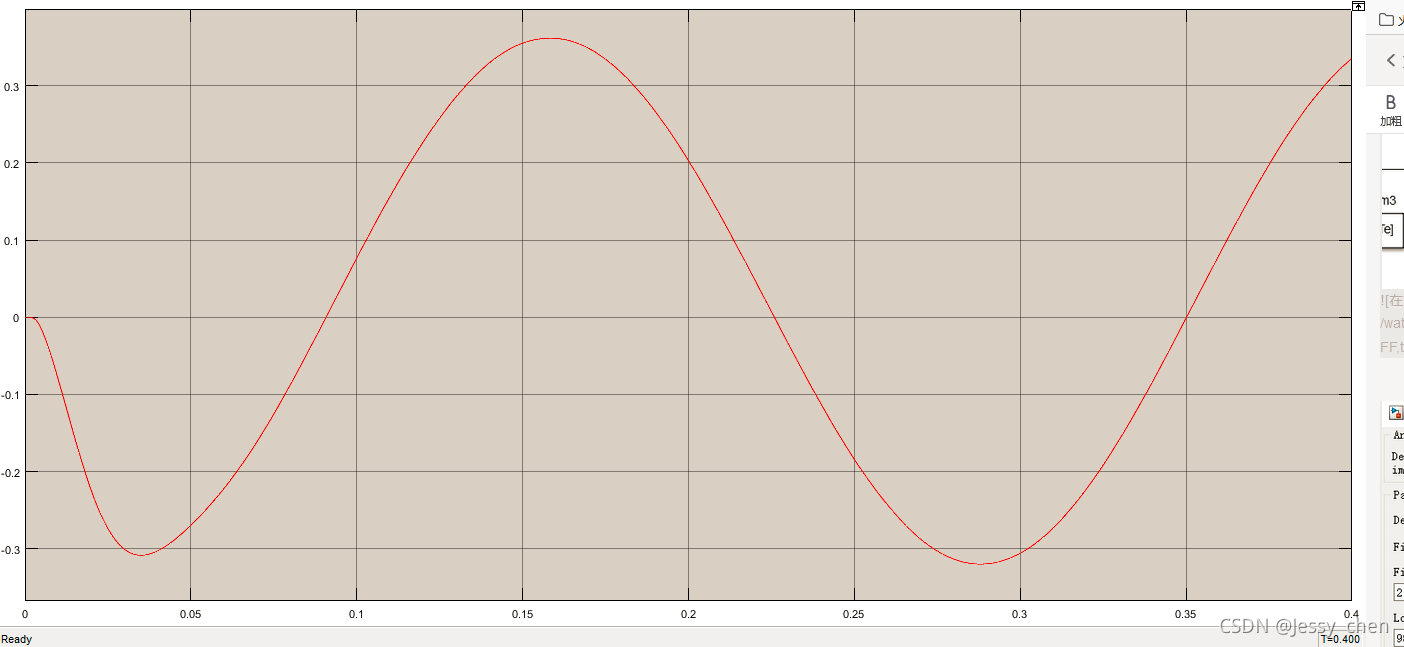
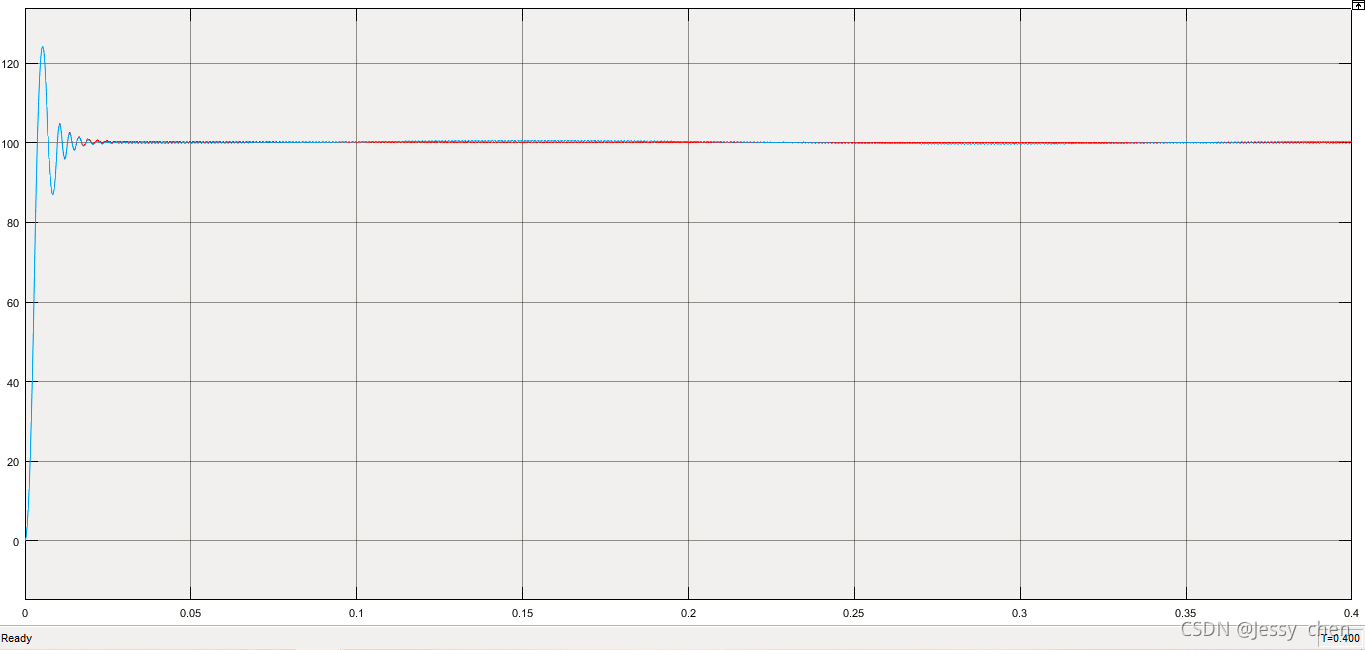
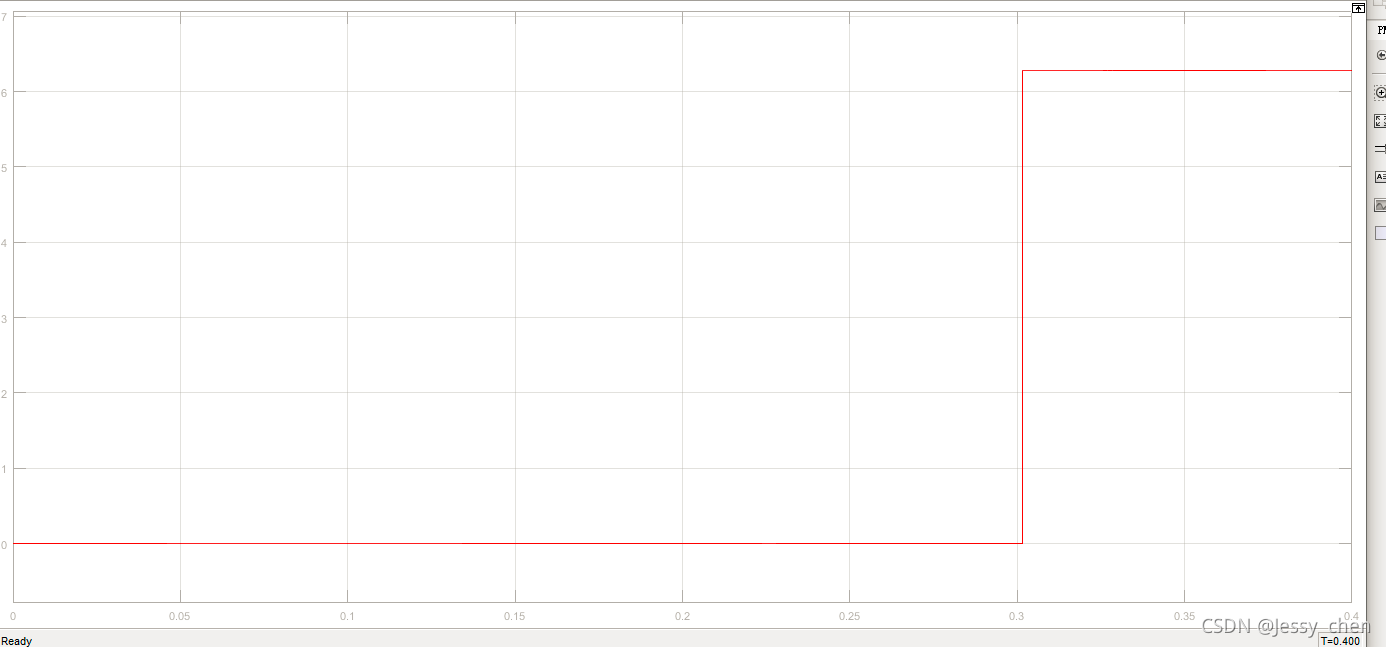
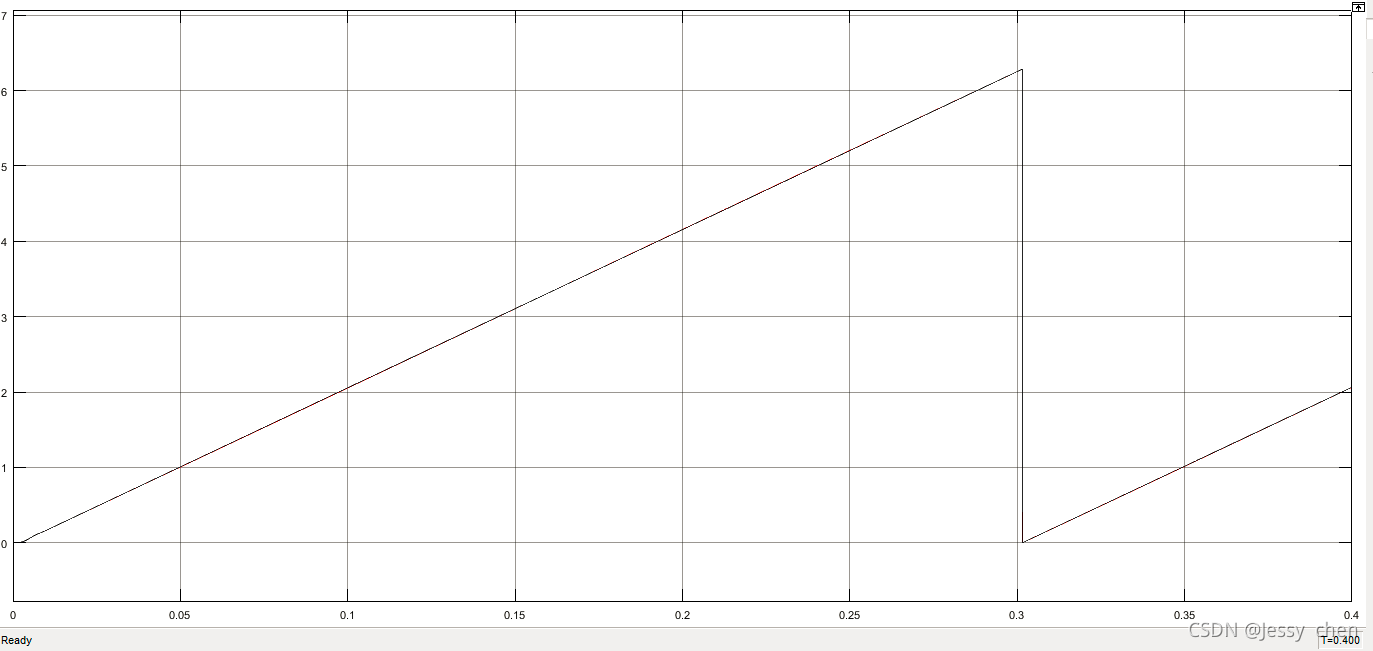
总体来说还是不错,但是误差相对来说还是挺大的。
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
文章目录一、概述简介原理模块二、配置Mysql使用版本环境要求1.操作系统2.mysql要求三、配置canal-server离线下载在线下载上传解压修改配置单机配置集群配置分库分表配置1.修改全局配置2.实例配置垂直分库水平分库3.修改group-instance.xml4.启动监听四、配置canal-adapter1修改启动配置2配置映射文件3启动ES数据同步查询所有订阅同步数据同步开关启动4.验证五、配置canal-admin一、概述简介canal是Alibaba旗下的一款开源项目,Java开发。基于数据库增量日志解析,提供增量数据订阅&消费。Git地址:https://github.co
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
需求:要创建虚拟机,就需要给他提供一个虚拟的磁盘,我们就在/opt目录下创建一个10G大小的raw格式的虚拟磁盘CentOS-7-x86_64.raw命令格式:qemu-imgcreate-f磁盘格式磁盘名称磁盘大小qemu-imgcreate-f磁盘格式-o?1.创建磁盘qemu-imgcreate-fraw/opt/CentOS-7-x86_64.raw10G执行效果#ls/opt/CentOS-7-x86_64.raw2.安装虚拟机使用virt-install命令,基于我们提供的系统镜像和虚拟磁盘来创建一个虚拟机,另外在创建虚拟机之前,提前打开vnc客户端,在创建虚拟机的时候,通过vnc
我需要一个非常简单的字符串验证器来显示第一个符号与所需格式不对应的位置。我想使用正则表达式,但在这种情况下,我必须找到与表达式相对应的字符串停止的位置,但我找不到可以做到这一点的方法。(这一定是一种相当简单的方法……也许没有?)例如,如果我有正则表达式:/^Q+E+R+$/带字符串:"QQQQEEE2ER"期望的结果应该是7 最佳答案 一个想法:你可以做的是标记你的模式并用可选的嵌套捕获组编写它:^(Q+(E+(R+($)?)?)?)?然后你只需要计算你获得的捕获组的数量就可以知道正则表达式引擎在模式中停止的位置,你可以确定匹配结束
我将Cucumber与Ruby结合使用。通过Selenium-Webdriver在Chrome中运行测试时,我想将下载位置更改为测试文件夹而不是用户下载文件夹。我当前的chrome驱动程序是这样设置的:Capybara.default_driver=:seleniumCapybara.register_driver:seleniumdo|app|Capybara::Selenium::Driver.new(app,:browser=>:chrome,desired_capabilities:{'chromeOptions'=>{'args'=>%w{window-size=1920,1
我想在heroku.com上查看我的应用程序日志的内容,所以我关注了thisexcellentadvice并拥有我所有的日志内容。但是我现在很想知道我的日志文件实际在哪里,因为“log/production.log”似乎是空的:C:\>herokuconsoleRubyconsoleforajpbrevx.heroku.com>>files=Dir.glob("*")=>["public","tmp","spec","Rakefile","doc","config.ru","app","config","lib","README","Gemfile.lock","vendor","sc
这应该是一个简单的问题,但我找不到任何相关信息。给定一个Ruby中的正则表达式,对于每个匹配项,我需要检索匹配的模式$1、$2,但我还需要匹配位置。我知道=~运算符为我提供了第一个匹配项的位置,而string.scan(/regex/)为我提供了所有匹配模式。如果可能,我需要在同一步骤中获得两个结果。 最佳答案 MatchDatastring.scan(regex)do$1#Patternatfirstposition$2#Patternatsecondposition$~.offset(1)#Startingandendingpo
我正在寻找用于Rails的优质管理插件。似乎大多数现有的插件/gem(例如“restful_authentication”、“acts_as_authenticated”)都围绕着self注册等展开。但是,我正在寻找一种功能齐全的基于管理/管理角色的解决方案——但不是简单地附加到另一个非基于角色的解决方案。如果我找不到,我想我会自己动手......只是不想重新发明轮子。 最佳答案 RyanBates最近做了两个关于授权的railscast(注意身份验证和授权之间的区别;身份验证检查用户是否如她所说的那样,授权检查用户是否有权访问资源