文中算法公式摘自《捷联惯导算法与组合导航原理》(严恭敏、翁浚 编著)、《惯性导航》(秦永元 编著),其他理解仅代表个人观点。本文是对姿态角和姿态矩阵之间转化的理解。
机体坐标系b系定义:
o飞机质心
x轴指向机头方向
z轴处在飞机对称面垂直x轴向下
y轴垂直oxz平面指向飞机右侧
导航系n系的定义:
xyz轴指向北东地(或东北天)方向
姿态角的定义(这里地面系指北东地坐标):
俯仰角:机体系x轴与地平面夹角,俯仰角抬头为正
横滚角:机体系z轴与包含机体系x轴铅锤面的夹角,右滚为正
航向角:机体系x轴在地平面投影与地面系x轴的夹角,投影在地面系x轴右侧为正。
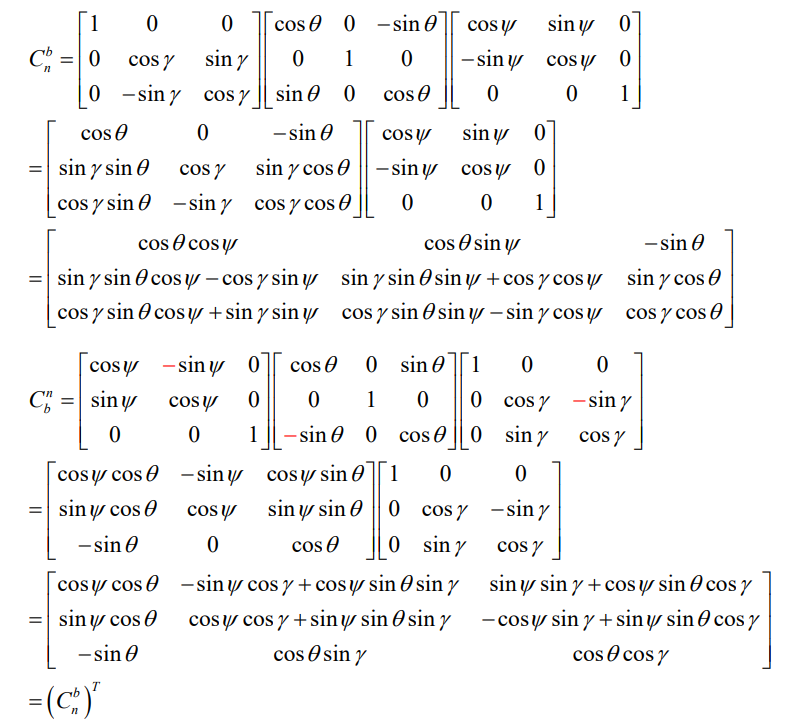
导航系转化为机体系:向右旋转航向角、向上旋转俯仰角、向右旋转横滚角,该顺序旋转符合姿态角的定义。
先用北东地坐标系
转化到三维坐标
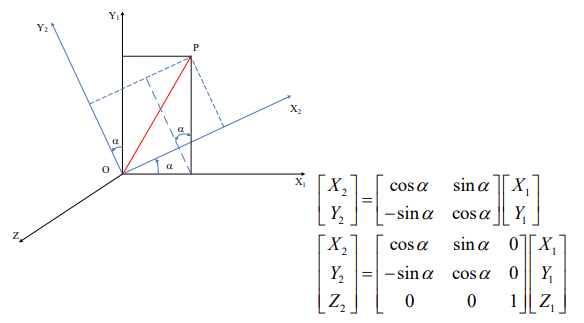
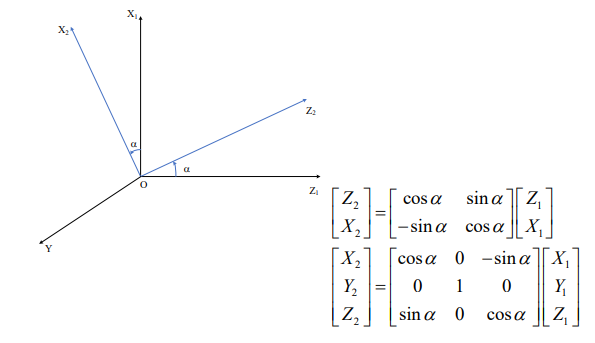
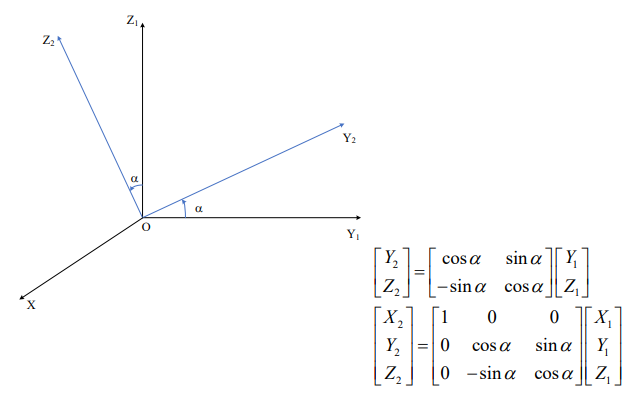
采用北东地坐标系时:先绕z轴转航向角,再绕y轴转俯仰角,最后绕x轴转横滚角
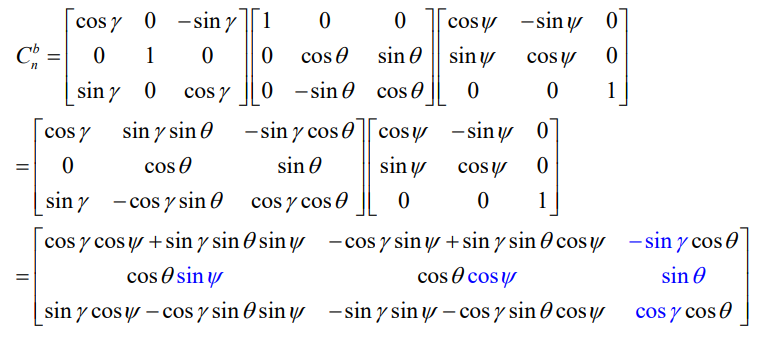
采用东北天坐标系时(机体系右前上,航向角北偏东为正时):先绕z轴转航向角,再绕x轴转俯仰角,最后绕y轴转横滚角。
如果航向角北偏西为正,取负即可。
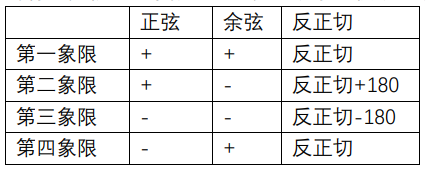
根据姿态矩阵中的角度求解姿态角。
之前程序中由于俯仰角范围在-pi/2~pi/2 范围内,余弦值为正,其实并不完全合理。
根据余弦项可以求出俯仰角,可以知道俯仰角的正负,因此可以判断出横滚和航向角正余弦
的符号,根据四象限反正切,可以求出横滚和航向角。
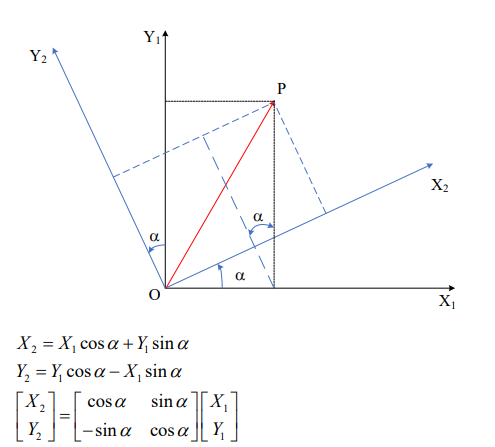
点向量坐标矩阵的几何意义介绍旋转矩阵的几何含义之前,先介绍一下点向量坐标矩阵的几何含义点:在一维空间下就是一个标量,如同一条直线上,以任意某一个位置为0点,以一定的尺度间隔为1,2,3...,相反方向为-1,-2,-3...;如此就形成了一维坐标系,这时候任何一个点都可以用一个数值表示,如点p1=5,即即从原点出发沿着x轴正方向移动5个尺度;点p2=-3,负方向移动3个尺度; 在一维坐标系上过原点做垂直于一维坐标系的直线,则形成了二维坐标系,此时描述一个点需要两个数值来表示点p3=(3,2),即从原点出发沿着x轴正方向移动3个尺度,在此基础上沿着y轴正方向移动两个尺度的位置就是点p3。
目录一.加解密算法数字签名对称加密DES(DataEncryptionStandard)3DES(TripleDES)AES(AdvancedEncryptionStandard)RSA加密法DSA(DigitalSignatureAlgorithm)ECC(EllipticCurvesCryptography)非对称加密签名与加密过程非对称加密的应用对称加密与非对称加密的结合二.数字证书图解一.加解密算法加密简单而言就是通过一种算法将明文信息转换成密文信息,信息的的接收方能够通过密钥对密文信息进行解密获得明文信息的过程。根据加解密的密钥是否相同,算法可以分为对称加密、非对称加密、对称加密和非
1.问题描述使用Python的turtle(海龟绘图)模块提供的函数绘制直线。2.问题分析一幅复杂的图形通常都可以由点、直线、三角形、矩形、平行四边形、圆、椭圆和圆弧等基本图形组成。其中的三角形、矩形、平行四边形又可以由直线组成,而直线又是由两个点确定的。我们使用Python的turtle模块所提供的函数来绘制直线。在使用之前我们先介绍一下turtle模块的相关知识点。turtle模块提供面向对象和面向过程两种形式的海龟绘图基本组件。面向对象的接口类如下:1)TurtleScreen类:定义图形窗口作为绘图海龟的运动场。它的构造器需要一个tkinter.Canvas或ScrolledCanva
所有题目均有五种语言实现。C实现目录、C++实现目录、Python实现目录、Java实现目录、JavaScript实现目录题目n行m列的矩阵,每个位置上有一个元素你可以上下左右行走,代价是前后两个位置元素值差的绝对值.另外,你最多可以使用一次传送阵(只能从一个数跳到另外一个相同的数)求从走上角走到右下角最少需要多少时间。输入描述:第一行两个整数n,m,分别代表矩阵的行和列。后面n行,每行m个整数,分别代表矩阵中的元素。输出描述:一个整数,表示最少需要多少时间。
我一直在尝试用Ruby实现Luhn算法。我一直在执行以下步骤:该公式根据其包含的校验位验证数字,该校验位通常附加到部分帐号以生成完整帐号。此帐号必须通过以下测试:从最右边的校验位开始向左移动,每第二个数字的值加倍。将乘积的数字(例如,10=1+0=1、14=1+4=5)与原始数字的未加倍数字相加。如果总模10等于0(如果总和以零结尾),则根据Luhn公式该数字有效;否则无效。http://en.wikipedia.org/wiki/Luhn_algorithm这是我想出的:defvalidCreditCard(cardNumber)sum=0nums=cardNumber.to_s.s
下面是我写的一个计算斐波那契数列中的值的方法:deffib(n)ifn==0return0endifn==1return1endifn>=2returnfib(n-1)+(fib(n-2))endend它工作到n=14,但在那之后我收到一条消息说程序响应时间太长(我正在使用repl.it)。有人知道为什么会这样吗? 最佳答案 Naivefibonacci进行了大量的重复计算-在fib(14)fib(4)中计算了很多次。您可以将内存添加到您的算法中以使其更快:deffib(n,memo={})ifn==0||n==1returnnen
为了防止在迁移到生产站点期间出现数据库事务错误,我们遵循了https://github.com/LendingHome/zero_downtime_migrations中列出的建议。(具体由https://robots.thoughtbot.com/how-to-create-postgres-indexes-concurrently-in概述),但在特别大的表上创建索引期间,即使是索引创建的“并发”方法也会锁定表并导致该表上的任何ActiveRecord创建或更新导致各自的事务失败有PG::InFailedSqlTransaction异常。下面是我们运行Rails4.2(使用Acti
我正在开发一个类似微论坛的项目,其中一个特殊用户发布一条快速(接近推文大小)的主题消息,订阅者可以用他们自己的类似大小的消息来响应。直截了当,没有任何形式的“挖掘”或投票,只是每个主题消息的响应按时间顺序排列。但预计会有很高的流量。我们想根据它们引起的响应嗡嗡声来标记主题消息,使用0到10的等级。在谷歌上搜索了一段时间的趋势算法和开源社区应用示例,到目前为止已经收集到两个有趣的引用资料,但我还没有完全理解它们:Understandingalgorithmsformeasuringtrends,关于使用基线趋势算法比较维基百科页面浏览量的讨论,在SO上。TheBritneySpearsP
我收到错误:unsupportedcipheralgorithm(AES-256-GCM)(RuntimeError)但我似乎具备所有要求:ruby版本:$ruby--versionruby2.1.2p95OpenSSL会列出gcm:$opensslenc-help2>&1|grepgcm-aes-128-ecb-aes-128-gcm-aes-128-ofb-aes-192-ecb-aes-192-gcm-aes-192-ofb-aes-256-ecb-aes-256-gcm-aes-256-ofbRuby解释器:$irb2.1.2:001>require'openssl';puts
文章目录一.Dijkstra算法想解决的问题二.Dijkstra算法理论三.java代码实现一.Dijkstra算法想解决的问题解决的问题:求解单源最短路径,即各个节点到达源点的最短路径或权值考察其他所有节点到源点的最短路径和长度局限性:无法解决权值为负数的情况二.Dijkstra算法理论参数:S记录当前已经处理过的源点到最短节点U记录还未处理的节点dist[]记录各个节点到起始节点的最短权值path[]记录各个节点的上一级节点(用来联系该节点到起始节点的路径)Dijkstra算法步骤:(1)初始化:顶点集S:节点A到自已的最短路径长度为0。只包含源点,即S={A}顶点集U:包含除A外的其他顶