《Linux驱动开发(一)—环境搭建与hello world》
《Linux驱动开发(二)—驱动与设备的分离设计》
《Linux驱动开发(三)—设备树》
《Linux驱动开发(四)—树莓派内核编译》
《Linux驱动开发(五)—树莓派设备树配合驱动开发》
《Linux驱动开发(六)—树莓派配合硬件进行字符驱动开发》
《Linux驱动开发(七)—树莓派按键驱动开发》
《Linux驱动开发(八)—树莓派SR04驱动开发》
《Linux驱动开发(九)—树莓派I2C设备驱动开发(BME280)》
《Linux驱动开发(十)—树莓派输入子系统学习(红外接收)》
《Linux驱动开发(十一)—树莓派SPI驱动学习(OLED)》
《Linux驱动开发(十二)—树莓派framebuffer学习(改造OLED)》
《Linux驱动开发(十三)—USB驱动HID开发学习(鼠标)》
《Linux驱动开发(十四)—USB驱动开发学习(键盘+鼠标)》
《Linux驱动开发(十五)—如何使用内核现有驱动(显示屏)》
《Linux驱动开发(十六)—块设备驱动》
《Linux驱动开发(十七)—树莓派PWM驱动》
今天来学一下驱动中的第三类设备,网络设备的驱动。边学边写,慢慢理解。

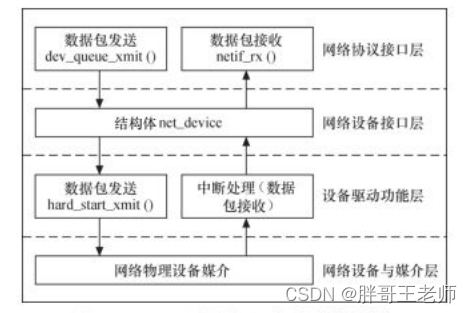
Linux网络设备驱动程序的体系结构如图所示,从上到下可以划分为4层,依次为网络协议接口层、网络设备接口层、提供实际功能的设备驱动功能层以及网络设备与媒介层,这4层的作用如下所示:

来看一个虚拟网卡的例子,就是直接构造软件网卡,来看一下实现过程
#include <linux/module.h>
#include <linux/netdevice.h>
#include <linux/etherdevice.h>
#include <linux/skbuff.h>
#include <linux/ip.h>
#include <linux/netdev_features.h>
static struct net_device *virt_net;
static void virt_rs_packet(struct sk_buff *skb, struct net_device *dev)
{
unsigned char *type;
struct iphdr *ih;
__be32 *saddr, *daddr, tmp;
unsigned char tmp_dev_addr[ETH_ALEN];
struct ethhdr *ethhdr;
struct sk_buff *rx_skb;
int ret;
//对调ethhdr结构体 "源/目的"MAC地址*/
ethhdr = (struct ethhdr *)skb->data;
memcpy(tmp_dev_addr, ethhdr->h_dest, ETH_ALEN);
memcpy(ethhdr->h_dest, ethhdr->h_source, ETH_ALEN);
memcpy(ethhdr->h_source, tmp_dev_addr, ETH_ALEN);
//对调iphdr结构体"源/目的" IP地址
ih = (struct iphdr *)(skb->data + sizeof(struct ethhdr));
saddr = &ih->saddr;
daddr = &ih->daddr;
tmp = *saddr;
*saddr = *daddr;
*daddr = tmp;
ih->check=0;
ih->check = ip_fast_csum((unsigned char *)ih,ih->ihl);
//之前是发送ping包0x08,需要改为0x00,表示接收ping包
type = skb->data + sizeof(struct ethhdr) + sizeof(struct iphdr);
*type = 0;
rx_skb = dev_alloc_skb(skb->len + 2);
skb_reserve(rx_skb, 2);
memcpy(skb_put(rx_skb, skb->len), skb->data, skb->len);
rx_skb->dev = dev;
rx_skb->ip_summed = CHECKSUM_UNNECESSARY;
rx_skb->protocol = eth_type_trans(rx_skb, dev);
ret=netif_rx(rx_skb);
dev->stats.rx_packets++;
dev->stats.rx_bytes += skb->len;
pr_info("rx_packets=%ld rx_bytes=%ld ret=%d\n",dev->stats.rx_packets,dev->stats.rx_bytes,ret);
}
static int virt_send_packet(struct sk_buff *skb, struct net_device *dev)
{
netif_stop_queue(dev);
virt_rs_packet(skb,dev);
dev_kfree_skb(skb);
dev->stats.tx_packets++;
dev->stats.tx_bytes+=skb->len;
pr_info("tx_packets=%ld tx_bytes=%ld\n",dev->stats.tx_packets,dev->stats.tx_bytes);
netif_wake_queue(dev);
return NETDEV_TX_OK;
}
static int set_mac_address(struct net_device *dev,void *p)
{
struct sockaddr *addr = p;
pr_info("set_mac_address\n");
if (netif_running(dev))
{
return -EBUSY;
}
memcpy(dev->dev_addr, addr->sa_data, dev->addr_len);
return 0;
}
void virt_tx_timeout(struct net_device *net,unsigned int txqueue)
{
pr_info("virt_tx_timeout\n");
}
static const struct net_device_ops net_ops =
{
.ndo_start_xmit = virt_send_packet,
.ndo_set_mac_address =set_mac_address,
.ndo_tx_timeout = virt_tx_timeout,
};
static int virt_net_init(void){
virt_net= alloc_netdev(sizeof(struct net_device), "virt_net", NET_NAME_UNKNOWN,ether_setup);
virt_net->netdev_ops= &net_ops;
virt_net->flags = IFF_NOARP;
virt_net->dev_addr[0] = 0x88;
virt_net->dev_addr[1] = 0x88;
virt_net->dev_addr[2] = 0x88;
virt_net->dev_addr[3] = 0x88;
virt_net->dev_addr[4] = 0x88;
virt_net->dev_addr[5] = 0x88;
register_netdev(virt_net);
return 0;
}
static void virt_net_exit(void)
{
unregister_netdev(virt_net);
free_netdev(virt_net);
}
module_init(virt_net_init);
module_exit(virt_net_exit);
MODULE_LICENSE("GPL");
编译加载之后,就有了这么一个网卡

不过这个169.254.106.62,为什么他会有这么一个IP
为什么某些电脑获得了形如169.254..之类的IP地址呢?
这说明这些电脑根本未能获得DHCP服务。如DHCP服务器太忙导致无法及时给客户机应答,使客户机认为网络里不存在DHCP服务器。这时,微软的操作系统会自动查找一个形如169.254.*.*的IP地址分配给客户机
不过不知道为啥我这个linux也吃了这么一个瓜

不过还是可以ping通的

为啥能ping通,因为我们在代码里给它返回了正确应答。
其中,在模块初始化函数中就做了前面说的三个步骤,过程也很简单。
virt_net= alloc_netdev(sizeof(struct net_device), "virt_net", NET_NAME_UNKNOWN,ether_setup);
包括操作netdev_ops和一些参数,例如下面的网卡mac
virt_net->netdev_ops= &net_ops;
virt_net->flags = IFF_NOARP;
virt_net->dev_addr[0] = 0x88;
virt_net->dev_addr[1] = 0x88;
virt_net->dev_addr[2] = 0x88;
virt_net->dev_addr[3] = 0x88;
virt_net->dev_addr[4] = 0x88;
virt_net->dev_addr[5] = 0x88;
register_netdev(virt_net);
net_device的数据结构很庞大,感兴趣的可以在netdevice.h中查看一下,本身就是网络设备的参数和状态信息。其中的操作结构net_device_ops也是一样的庞大,这个里面是操作处理函数,例如接收到数据的回调函数。
那在这个虚拟设备中,就只是封装了三个接口
static const struct net_device_ops net_ops =
{
.ndo_start_xmit = virt_send_packet,
.ndo_set_mac_address =set_mac_address,
.ndo_tx_timeout = virt_tx_timeout,
};
netdev_tx_t (*ndo_start_xmit)(struct sk_buff *skb, struct net_device *dev);
功能:当需要传输数据包时调用。返回NETDEV_TX_OK。可以返回NETDEV_TX_BUSY,但应在这之前停止队列;它适用于过时的冷门的设备,但如果您返回NETDEV_TX_BUSY,堆栈确实会做大量无用的工作。必填的;不能为空。
这翻译是不是有点那味

int (*ndo_set_mac_address)(struct net_device *dev, void *addr);
功能:当MAC地址需要改变时,如果未定义此接口,则MAC地址无法更改。
void (*ndo_tx_timeout)(struct net_device *dev, unsigned int txqueue);
功能:当发送器未对dev->watchdog ticks取得任何进展时使用的回调。
那么整体来看,这个例子的功能,就是在数据来临之后,一旦调用virt_send_packet函数,就把收到的数据,利用本地函数virt_rs_packet将数据的源目的地址调换,修改成应答,发送出去,在ping的时候,就会有应答的反应了。
参照icmp的格式。
把请求

变成了应答

所以ping的时候,就会有反应。

不过前面的虚拟网卡比较简单,内核中已经有好多网卡的驱动,我这有一个usb的无线网卡,不妨来学习一下,型号是rtl8187,所有代码都在这个路径下
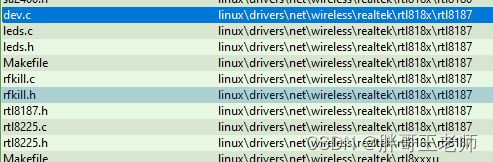
其中dev.c是模块的主文件,创建模块,probe函数等都在这里。
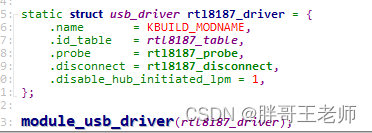
首先是作为usb设备进行注册。毕竟是usb模块嘛
在probe函数中,用到了一个ieee80211的子系统,具体学习可以参考《Linux无线驱动简介及mac80211源码分析》
mac80211:是一个Linux内核子系统,是驱动开发者可用于为SoftMAC无线设备写驱动的框架
不过我看了半天,还是没看太懂,过于复杂,不做展示

在probe函数中,主要相关是下面三个函数的使用。
申请
dev = ieee80211_alloc_hw(sizeof(*priv), &rtl8187_ops);
配置
ieee80211_hw_set(dev, RX_INCLUDES_FCS);
……
注册
err = ieee80211_register_hw(dev);
在申请步骤,和rtl8187相关的操作都在rtl8187_ops结构中
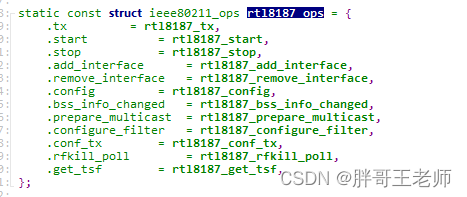
这里面的大部分操作,都是和usb读写相关的,举个例子tx函数
* @tx: Handler that 802.11 module calls for each transmitted frame.
* skb contains the buffer starting from the IEEE 802.11 header.
* The low-level driver should send the frame out based on
* configuration in the TX control data. This handler should,
* preferably, never fail and stop queues appropriately.
* Must be atomic.
最终调用到
static void rtl8187_tx(struct ieee80211_hw *dev,
struct ieee80211_tx_control *control,
struct sk_buff *skb)
最终也是通过usb结构urb发送出去
然后就是中间的相关配置整个模块,里面用到了usb传输方式配置寄存器,也用了eep配置网卡中的数据。
最终注册函数
ieee80211_register_hw->
ieee80211_if_add->
cfg80211_register_netdevice->
register_netdevice
完成了网卡的注册。
整个过程目前只捋顺了这些东西,要想看懂每一行,估计也是很困难,只是把关键的操作找出来了。

可以再来看一个更简单的协议
首先也是注册一个usb设备
然后看probe函数
static int rtl8150_probe(struct usb_interface *intf,
const struct usb_device_id *id)
{
struct usb_device *udev = interface_to_usbdev(intf);
rtl8150_t *dev;
struct net_device *netdev;
netdev = alloc_etherdev(sizeof(rtl8150_t));
if (!netdev)
return -ENOMEM;
dev = netdev_priv(netdev);
dev->intr_buff = kmalloc(INTBUFSIZE, GFP_KERNEL);
if (!dev->intr_buff) {
free_netdev(netdev);
return -ENOMEM;
}
tasklet_setup(&dev->tl, rx_fixup);
spin_lock_init(&dev->rx_pool_lock);
dev->udev = udev;
dev->netdev = netdev;
netdev->netdev_ops = &rtl8150_netdev_ops;
netdev->watchdog_timeo = RTL8150_TX_TIMEOUT;
netdev->ethtool_ops = &ops;
dev->intr_interval = 100; /* 100ms */
if (!alloc_all_urbs(dev)) {
dev_err(&intf->dev, "out of memory\n");
goto out;
}
if (!rtl8150_reset(dev)) {
dev_err(&intf->dev, "couldn't reset the device\n");
goto out1;
}
fill_skb_pool(dev);
set_ethernet_addr(dev);
usb_set_intfdata(intf, dev);
SET_NETDEV_DEV(netdev, &intf->dev);
if (register_netdev(netdev) != 0) {
dev_err(&intf->dev, "couldn't register the device\n");
goto out2;
}
dev_info(&intf->dev, "%s: rtl8150 is detected\n", netdev->name);
return 0;
out2:
usb_set_intfdata(intf, NULL);
free_skb_pool(dev);
out1:
free_all_urbs(dev);
out:
kfree(dev->intr_buff);
free_netdev(netdev);
return -EIO;
}
是不是和虚拟网卡的有点类似了,简单清楚

几个核心操作
netdev = alloc_etherdev(sizeof(rtl8150_t));
这里就是开发网络驱动的核心部分,这个netdev是一个私有空间,不同类型的网卡,通常结构不一样,里面存放的就是针对这个设备驱动的数据
例如
tasklet_setup(&dev->tl, rx_fixup);
netdev->netdev_ops = &rtl8150_netdev_ops;
set_ethernet_addr(dev);
if (register_netdev(netdev) != 0) {
dev_err(&intf->dev, "couldn't register the device\n");
goto out2;
}
这个感觉还是清楚多了。不过实际上,可能真的没什么机会去写一个完整的驱动,应该是以移植驱动到一个嵌入式平台为主吧。

最近的大事就是辅助驾驶出事故,辅助驾驶在目前来看还是不够成熟,辅助驾驶还得驾驶员紧盯着,也不知道在辅助什么,而且都知道无法识别静态物体,反正是做不到自动驾驶的阶段,还是都别用的比较好。
首先,路面上临时出现的路障、三角、警示牌、施工作业区由于出现的周期太短,往往无法被现成的自动驾驶高精地图收录。于是识别上述物体的任务落在本就压力山大的自动驾驶机器头上。
机器感知与人类感知的逻辑不同。人眼可以清晰看到前方路标、路牌、前车尾灯并将其分类,而机器识别的结果只能由数据和算法决定。开放道路场景千变万化,只要物体简单变换外观,就必须重新识别。机器或许能识别出一个推自行车的行人,但难以在短时间内识别一个戴皮卡丘头套推车的行人。数据场景库的丰富度和算法质量不足以应付这一罕见场景。
静止物体的感知和识别是更有难度的工作。在自动驾驶感知系统中,雷达“看到”的是点云,摄像头“看到”的是图像像素,二者数据特征不同,需要复杂的融合过程。反观移动的目标点,由于一直在变化,相对容易判断。而静止障碍物混在静止路牌、路标、绿植中,只有经过多轮筛选才能标识出。一旦算法不够成熟,很容易出现某一传感器识别出障碍物,但被承担巨大高速运转压力的算法当作错误或不重要数据直接过滤。
你们想想,你带着老婆,出了城,吃着火锅还唱着歌!突然就撞了人!

不过,就目前的人工智能来说,代替财务应该是没啥问题的。但是为啥没有财务被代替呢?因为人工智能,不会坐牢。

今天是中元节,还是要早点回家,本来阳气就不足,可别被偷走了。
我正在编写一个包含C扩展的gem。通常当我写一个gem时,我会遵循TDD的过程,我会写一个失败的规范,然后处理代码直到它通过,等等......在“ext/mygem/mygem.c”中我的C扩展和在gemspec的“扩展”中配置的有效extconf.rb,如何运行我的规范并仍然加载我的C扩展?当我更改C代码时,我需要采取哪些步骤来重新编译代码?这可能是个愚蠢的问题,但是从我的gem的开发源代码树中输入“bundleinstall”不会构建任何native扩展。当我手动运行rubyext/mygem/extconf.rb时,我确实得到了一个Makefile(在整个项目的根目录中),然后当
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
我们的git存储库中目前有一个Gemfile。但是,有一个gem我只在我的环境中本地使用(我的团队不使用它)。为了使用它,我必须将它添加到我们的Gemfile中,但每次我checkout到我们的master/dev主分支时,由于与跟踪的gemfile冲突,我必须删除它。我想要的是类似Gemfile.local的东西,它将继承从Gemfile导入的gems,但也允许在那里导入新的gems以供使用只有我的机器。此文件将在.gitignore中被忽略。这可能吗? 最佳答案 设置BUNDLE_GEMFILE环境变量:BUNDLE_GEMFI
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
我想在Ruby中创建一个用于开发目的的极其简单的Web服务器(不,不想使用现成的解决方案)。代码如下:#!/usr/bin/rubyrequire'socket'server=TCPServer.new('127.0.0.1',8080)whileconnection=server.acceptheaders=[]length=0whileline=connection.getsheaders想法是从命令行运行这个脚本,提供另一个脚本,它将在其标准输入上获取请求,并在其标准输出上返回完整的响应。到目前为止一切顺利,但事实证明这真的很脆弱,因为它在第二个请求上中断并出现错误:/usr/b
我正在玩HTML5视频并且在ERB中有以下片段:mp4视频从在我的开发环境中运行的服务器很好地流式传输到chrome。然而firefox显示带有海报图像的视频播放器,但带有一个大X。问题似乎是mongrel不确定ogv扩展的mime类型,并且只返回text/plain,如curl所示:$curl-Ihttp://0.0.0.0:3000/pr6.ogvHTTP/1.1200OKConnection:closeDate:Mon,19Apr201012:33:50GMTLast-Modified:Sun,18Apr201012:46:07GMTContent-Type:text/plain
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit