本文介绍如何使用stm32连接usb接口的飞行摇杆。
工程源码:单片机STM32F429连接USB飞行摇杆示例工程-单片机文档类资源-CSDN文库
硬件: STM32F429IGT6开发板,USB接口的飞行摇杆。

软件:STM32CubeIDE 1.11
仿真器:stlink
参考书:《圈圈教你玩USB》
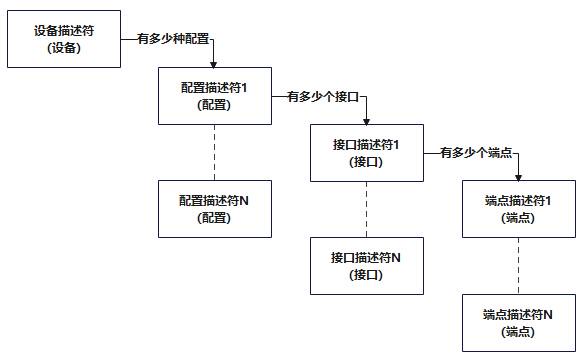
一个USB设备只有一个设备描述符。USB主机通过不同种类的描述符,获得一个设备的特性。描述符的种类包括:设备描述符,配置描述符,接口描述符,端点描述符。USB描述符之间的关系是一种树状结构。设备描述符包含多个配置描述符,配置描述符包含多个接口描述符,接口描述符包含多个端点描述符。如下图所示:
STM32CubeIDE的USB HOST模块实现了USB设备通讯,实现了设备发现到设备枚举,获得描述符等一系列操作。在此基础之上,可以方便的开发USB主机模式的应用。本文使用USB HOST模块实现连接USB飞行摇杆。
使用CubeIDE 新建一个F429项目,项目的名称为F429JoyStick。
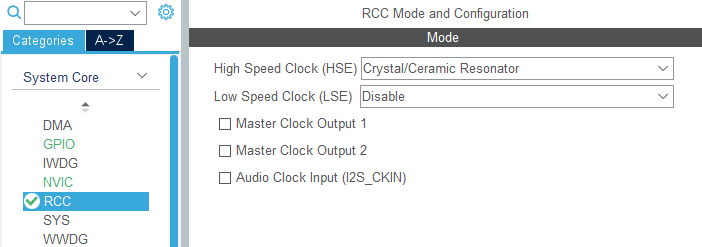
芯片配置:
RCC
USB_OTG_FS

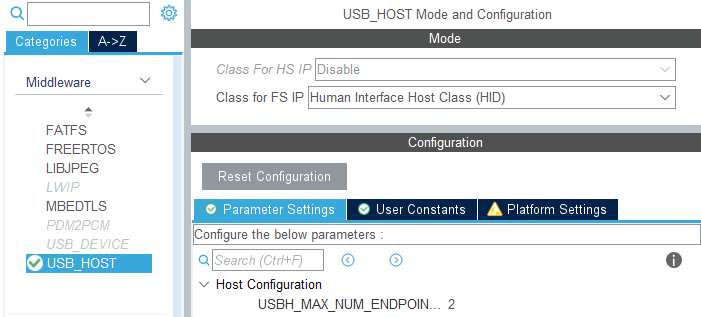
USB_HOST
时钟
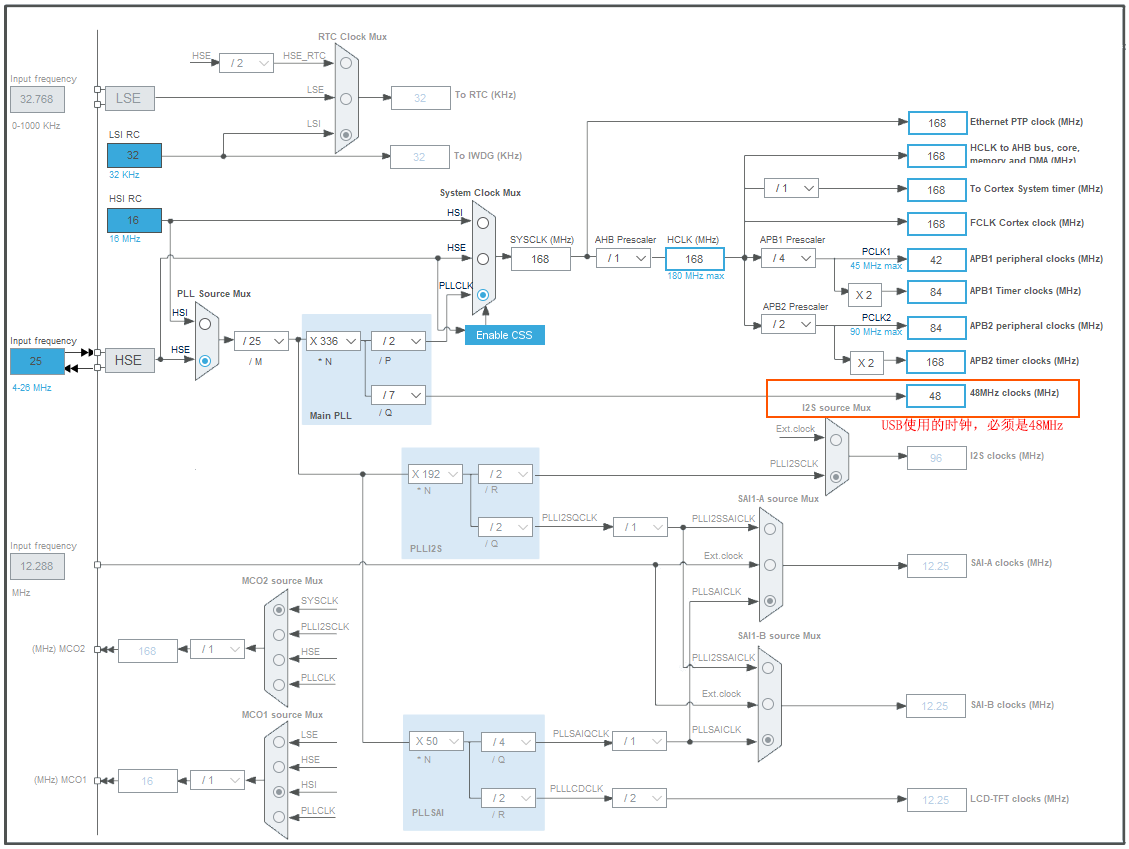
USB使用的时钟,必须是48MHz,否则在运行代码时,通讯会失败,无法获得设备描述符。
配置完成,保存并生成代码。
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USB_HOST_Init(); //初始化USB硬件
while (1)
{
MX_USB_HOST_Process(); //更新USB设备状态。
}
}
main方法循环调用MX_USB_HOST_Process(),所有USB操作都在MX_USB_HOST_Process()方法里完成。MX_USB_HOST_Process()最终会调用usbh_core.c文件里的 USBH_StatusTypeDef USBH_Process (USBH_HandleTypeDef *phost) 方法,这个方法的源代码较长。以下是这个方法的流程图:
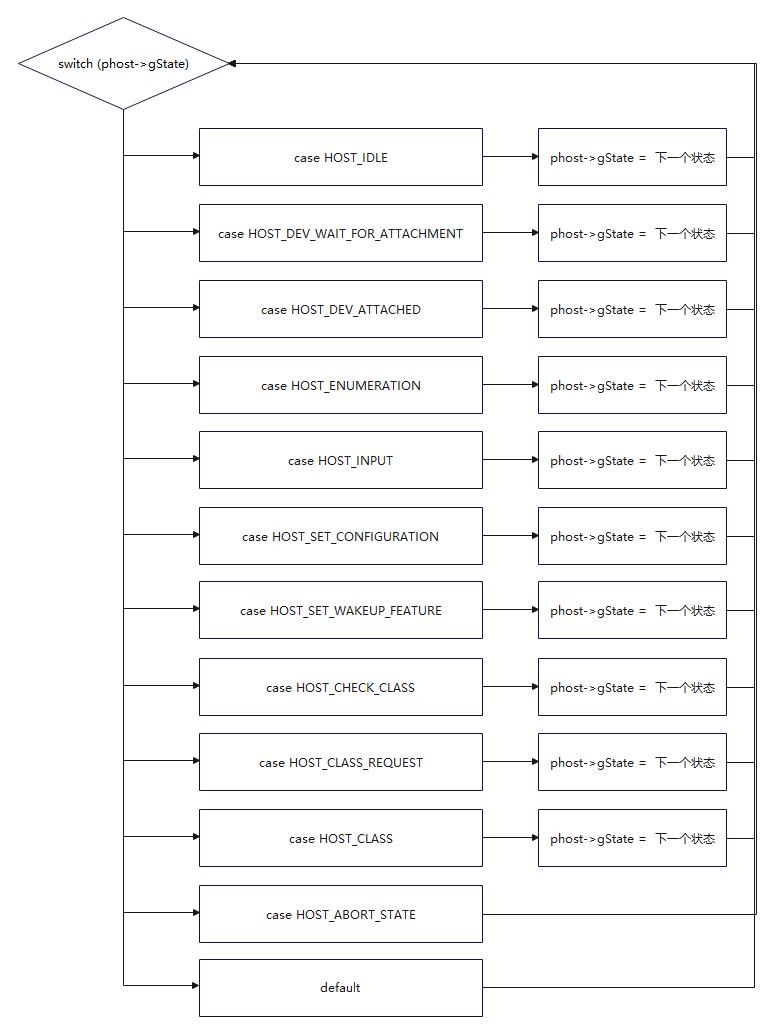
USBH_Process()使用状态机在不同的状态之间转换,一切顺利的情况下,将会获得所有的描述符。
用仿真器烧录程序、调试,会发现运行到HOST_CHECK_CLASS状态时,直接跳转到了HOST_ABORT_STATE状态。问题出在这一段代码:
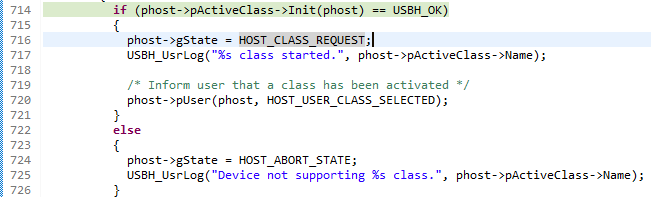
第714行 if (phost->pActiveClass->Init(phost) ==USBH_OK)
只有在返回值为USBH_OK时,才能转到下一个状态,否则转到HOST_ABORT_STATE状态。
phost->pActiveClass->Init(phost)调用的是usbh_hid.c文件里的static USBH_StatusTypeDef USBH_HID_InterfaceInit(USBH_HandleTypeDef*phost)方法
代码如下:

USBH_HID_InterfaceInit方法继续调用USBH_FindInterface方法:
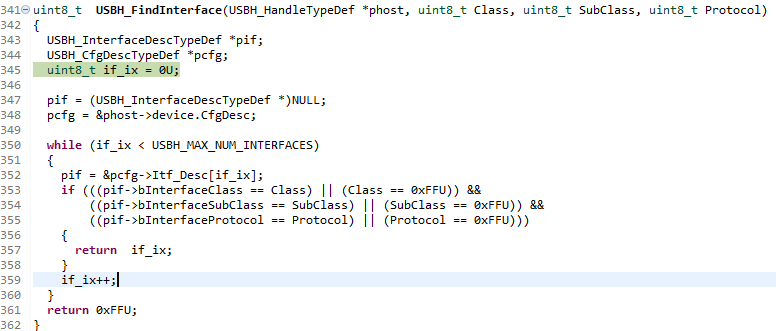
这段代码遍历&pcfg->Itf_Desc的所有接口描述符,如果有符合条件的描述符,返回描述符的序号,否则返回0xFFU。
下图是使用仿真器获得的飞行摇杆的接口描述符:
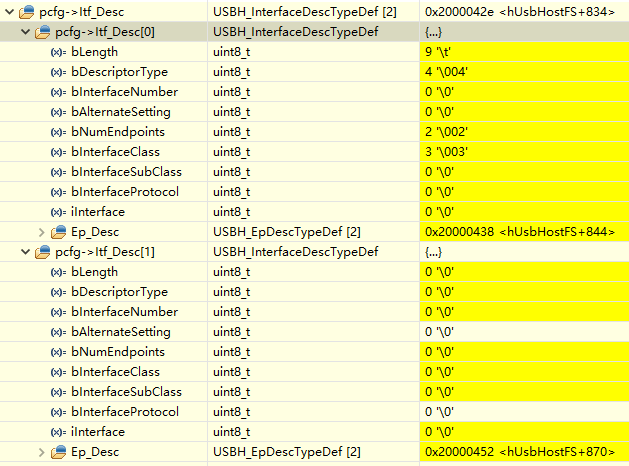
其中的pcfg->Itf_Desc[0]接口描述符里的三个值是
bInterfaceClass = 3
bInterfaceSubClass = 0
bInterfaceProtocol = 0
这三个值很重要,后面的代码修改都是围绕这三个值。
if (((pif->bInterfaceClass ==Class) || (Class == 0xFFU)) &&
((pif->bInterfaceSubClass ==SubClass) || (SubClass == 0xFFU)) &&
((pif->bInterfaceProtocol == Protocol) || (Protocol == 0xFFU)))
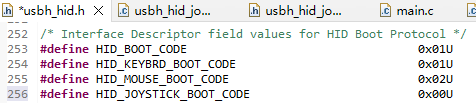
这个判断条件里的其他值
Class = 3
SubClass = 1
Protocol = 0xFFU
显然不满足判断语句的条件。USB HOST默认生成的代码不支持Class=3,SubClass=0,Protocol=0的USB设备。
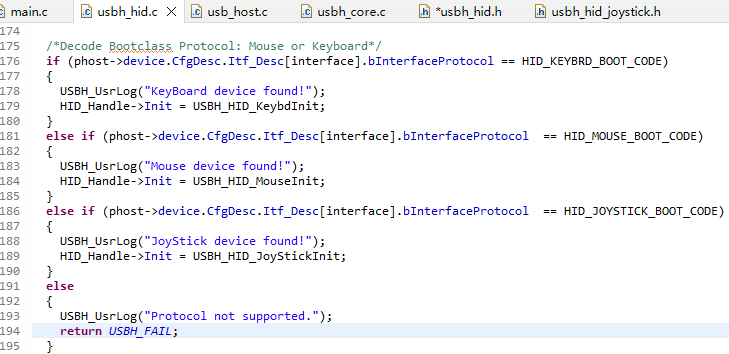
修改USBH_HID_InterfaceInit(USBH_HandleTypeDef*phost)方法的代码,修改结果如下:

重新编译后继续调试,会发现USBH_HID_InterfaceInit(USBH_HandleTypeDef*phost)方法里的这段代码又出现了问题:
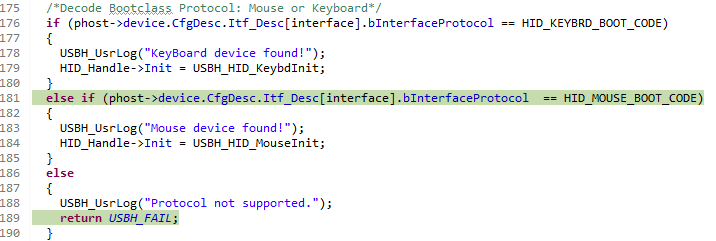
同样的道理,对于不支持的USB设备,会直接返回USBH_FAIL。为此,需要在项目里增加一个飞行摇杆设备。
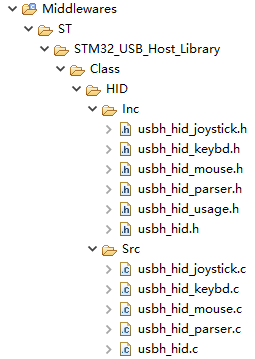
增加usbh_hid_joystick.h, usbh_hid_joystick.c文件
新增文件的目录结构如下:
usbh_hid_joystick.h
#ifndef __USBH_HID_JOYSTICK_H
#define __USBH_HID_JOYSTICK_H
#ifdef __cplusplus
extern "C" {
#endif
#include "usbh_hid.h"
#define PROTOLENGTH 8
typedef struct _HID_JOYSTICK_Info
{
uint8_t data[PROTOLENGTH];
}
HID_JOYSTICK_Info_TypeDef;
USBH_StatusTypeDef USBH_HID_JoyStickInit(USBH_HandleTypeDef *phost);
HID_JOYSTICK_Info_TypeDef *USBH_HID_GetJoyStickInfo(USBH_HandleTypeDef *phost);
#ifdef __cplusplus
}
#endif
#endif usbh_hid_joystick.c
#include "usbh_hid_joystick.h"
#include "usbh_hid_parser.h"
#include <string.h>
HID_JOYSTICK_Info_TypeDef joystick_info;
uint8_t joystick_report_data[PROTOLENGTH];
uint8_t joystick_rx_report_buf[PROTOLENGTH];
static USBH_StatusTypeDef USBH_HID_JoyStickDecode(USBH_HandleTypeDef *phost);
USBH_StatusTypeDef USBH_HID_JoyStickInit(USBH_HandleTypeDef *phost)
{
uint32_t i;
HID_HandleTypeDef *HID_Handle = (HID_HandleTypeDef *) phost->pActiveClass->pData;
for (i = 0U; i <PROTOLENGTH; i++)
{
joystick_info.data[i] = 0U;
joystick_report_data[i] = 0U;
joystick_rx_report_buf[i] = 0U;
}
if (HID_Handle->length > sizeof(joystick_report_data))
{
HID_Handle->length = (uint16_t)sizeof(joystick_report_data);
}
HID_Handle->pData = (uint8_t *)(void *)joystick_rx_report_buf;
USBH_HID_FifoInit(&HID_Handle->fifo, phost->device.Data, (uint16_t)(HID_QUEUE_SIZE * sizeof(joystick_report_data)));
return USBH_OK;
}
HID_JOYSTICK_Info_TypeDef *USBH_HID_GetJoyStickInfo(USBH_HandleTypeDef *phost)
{
if (USBH_HID_JoyStickDecode(phost) == USBH_OK)
{
return &joystick_info;
}
else
{
return NULL;
}
}
static USBH_StatusTypeDef USBH_HID_JoyStickDecode(USBH_HandleTypeDef *phost)
{
HID_HandleTypeDef *HID_Handle = (HID_HandleTypeDef *) phost->pActiveClass->pData;
if (HID_Handle->length == 0U)
{
return USBH_FAIL;
}
if (USBH_HID_FifoRead(&HID_Handle->fifo, &joystick_report_data, HID_Handle->length) == HID_Handle->length)
{
for(int i=0;i<HID_Handle->length;i++)
{
joystick_info.data[i] = *(joystick_report_data + i);
}
return USBH_OK;
}
return USBH_FAIL;
}
修改其他文件,修改内容如下:
增加适当的include文件后,保存所有修改,重新生成文件,调试。
将断点设置在usb_host.c的如下位置:
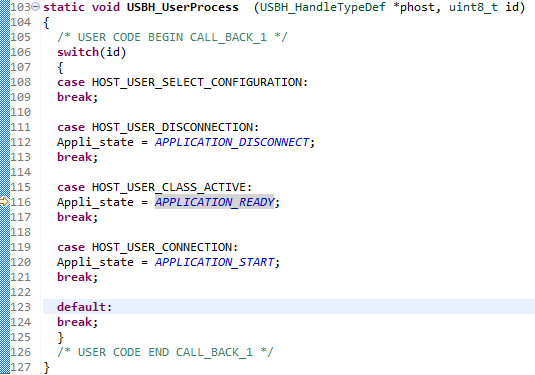
程序能运行到Appli_state = APPLICATION_READY这一行说明USB设备可以正常连接了。
在usbh_hid_joystick.h里的PROTOLENGTH是USB数据传输时使用的长度
#define PROTOLENGTH 8
PROTOLENGTH定义的长度值需要从端点描述符里获得:
获得位置也是在USBH_HID_InterfaceInit(USBH_HandleTypeDef*phost)方法里

其中HID_Handle->length变量的值就是PROTOLENGTH需要定义的值。
usbh_hid_joystick.c :
USBH_HID_GetJoyStickInfo方法用来获得飞行摇杆的数据。
摇杆协议解析:
我正在使用Sequel构建一个愿望list系统。我有一个wishlists和itemstable和一个items_wishlists连接表(该名称是续集选择的名称)。items_wishlists表还有一个用于facebookid的额外列(因此我可以存储opengraph操作),这是一个NOTNULL列。我还有Wishlist和Item具有续集many_to_many关联的模型已建立。Wishlist类也有:selectmany_to_many关联的选项设置为select:[:items.*,:items_wishlists__facebook_action_id].有没有一种方法可以
我使用的是Firefox版本36.0.1和Selenium-Webdrivergem版本2.45.0。我能够创建Firefox实例,但无法使用脚本继续进行进一步的操作无法在60秒内获得稳定的Firefox连接(127.0.0.1:7055)错误。有人能帮帮我吗? 最佳答案 我遇到了同样的问题。降级到firefoxv33后一切正常。您可以找到旧版本here 关于ruby-无法在60秒内获得稳定的Firefox连接(127.0.0.1:7055),我们在StackOverflow上找到一个类
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
考虑一下:现在这些情况:#output:http://domain.com/?foo=1&bar=2#output:http://domain.com/?foo=1&bar=2#output:http://domain.com/?foo=1&bar=2#output:http://domain.com/?foo=1&bar=2我需要用其他字符串输出URL。我如何保证&符号不会被转义?由于我无法控制的原因,我无法发送&。求助!把我的头发拉到这里:\编辑:为了澄清,我实际上有一个像这样的数组:@images=[{:id=>"fooid",:url=>"http://
我有一个super简单的脚本,它几乎包含了FayeWebSocketGitHub页面上用于处理关闭连接的内容:ws=Faye::WebSocket::Client.new(url,nil,:headers=>headers)ws.on:opendo|event|p[:open]#sendpingcommand#sendtestcommand#ws.send({command:'test'}.to_json)endws.on:messagedo|event|#hereistheentrypointfordatacomingfromtheserver.pJSON.parse(event.d
我有一个ruby脚本可以打开与Apple推送服务器的连接并发送所有待处理的通知。我看不出任何原因,但当Apple断开我的脚本时,我遇到了管道损坏错误。我已经编写了我的脚本来适应这种情况,但我宁愿只是找出它发生的原因,这样我就可以在第一时间避免它。它不会始终根据特定通知断开连接。它不会以特定的字节传输大小断开连接。一切似乎都是零星的。您可以在单个连接上发送的数据传输或有效负载计数是否有某些限制?看到人们的解决方案始终保持一个连接打开,我认为这不是问题所在。我看到连接在3次通知后断开,我看到它在14次通知后断开。我从未见过它能超过14点。有没有人遇到过这种类型的问题?如何处理?
我的意思是之前建立的那个DB=Sequel.sqlite('my_blog.db')或DB=Sequel.connect('postgres://user:password@localhost/my_db')或DB=Sequel.postgres('my_db',:user=>'user',:password=>'password',:host=>'localhost')等等。Sequel::Database类没有名为“disconnect”的公共(public)实例方法,尽管它有一个“connect”。也许有人已经遇到过这个问题。我将不胜感激。 最佳答案
我有一个遗留数据库,我正在努力让ActiveRecord使用它。我遇到了连接表的问题。我有以下内容:classTvShow然后我有一个名为tvshowlinkepisode的表,它有2个字段:idShow、idEpisode所以我有2个表和它们之间的连接(多对多关系),但是连接使用非标准外键。我的第一个想法是创建一个名为TvShowEpisodeLink的模型,但没有主键。我的想法是,由于外键是非标准的,我可以使用set_foreign_key并进行一些控制。最后,我想说一些类似TvShow.find(:last).episodes或Episode.find(:last).tv_sho
我正在使用PostgreSQL9.1.3(x86_64-pc-linux-gnu上的PostgreSQL9.1.3,由gcc-4.6.real(Ubuntu/Linaro4.6.1-9ubuntu3)4.6.1,64位编译)和在ubuntu11.10上运行3.2.2或3.2.1。现在,我可以使用以下命令连接PostgreSQLsupostgres输入密码我可以看到postgres=#我将以下详细信息放在我的config/database.yml中并执行“railsdb”,它工作正常。开发:adapter:postgresqlencoding:utf8reconnect:falsedat