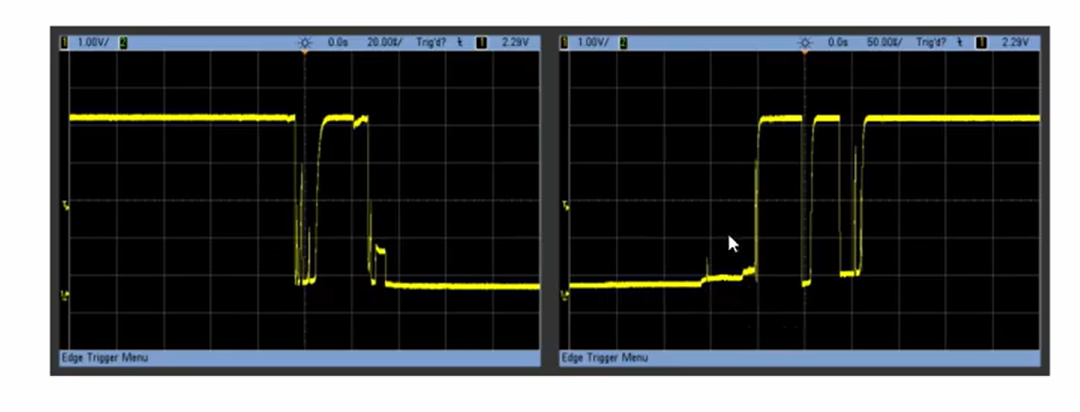
按键按下和松开的时候,按键金属片之间的贴合、分离有一个过程。给STM32输入的信号并不是理想的0和1切换的过程。而是如下图所示的,按下和松开的一小段时间内按键信号出现抖动(jitter),这种现象称为按键抖动(Button Bouncing)。为了避免程序上出现误动作,需要从硬件或软件上消除按键抖动(Button Debouncing)。
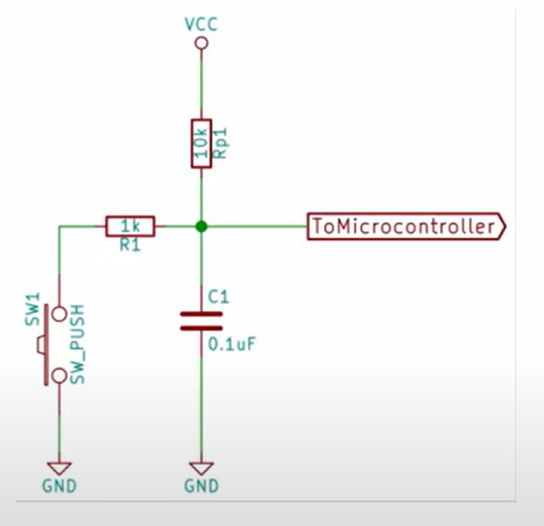
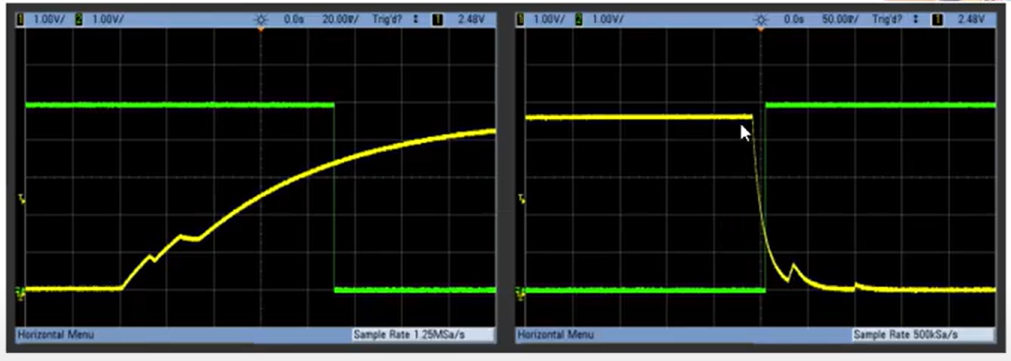
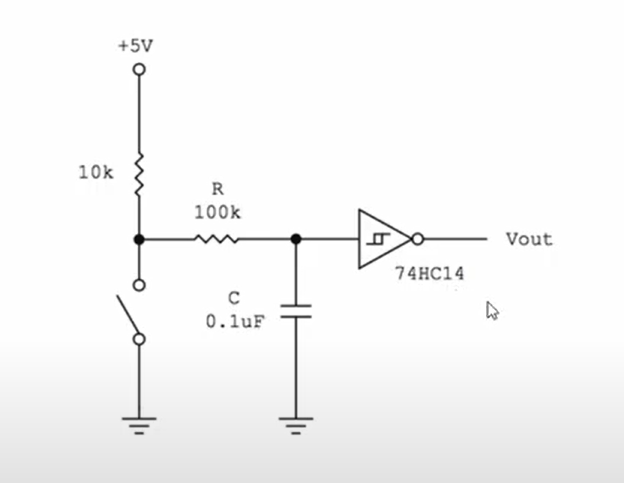
可以从电路设计上消除抖动,常见的有RC滤波电路消抖。但是仅通过RC电路,消抖过程慢,实际效果也并不好,一般会加上施密特触发器。硬件消抖的缺点是要增加额外的元器件,如果有多个需要消抖的输入信号,则会增加较大的成本。
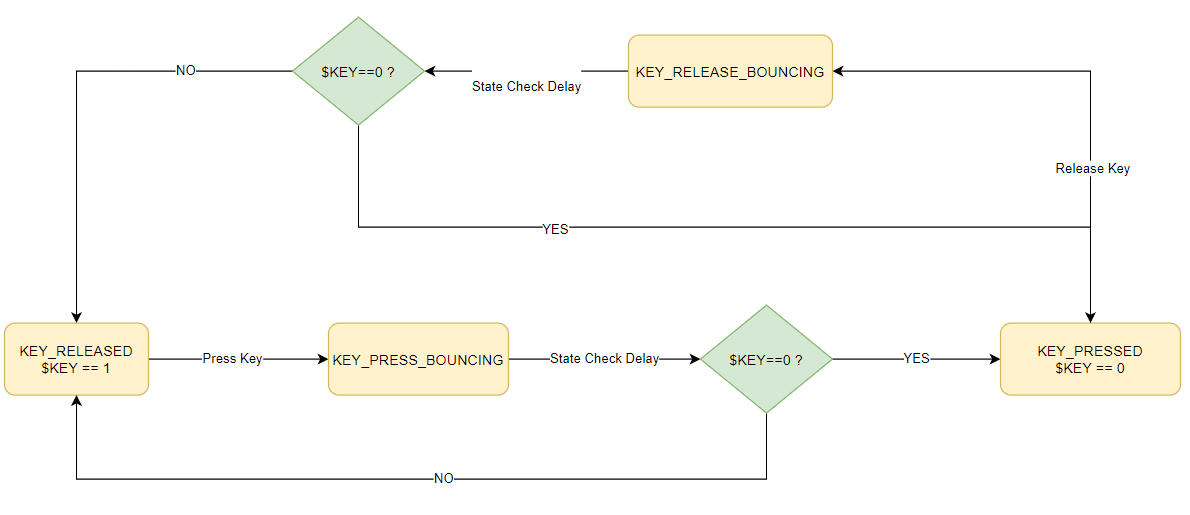
按键状态变化后,短时间内的状态是抖动的、不可采用的。软件上可延迟一段时间再判断按键的状态。按键的状态机变化如下图所示。
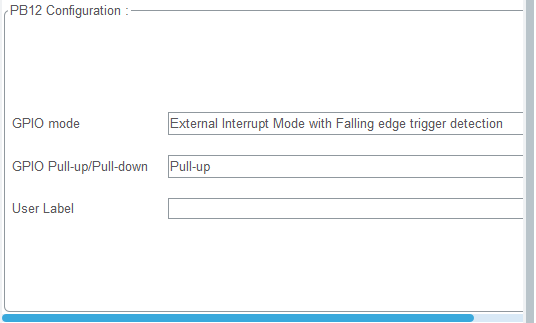
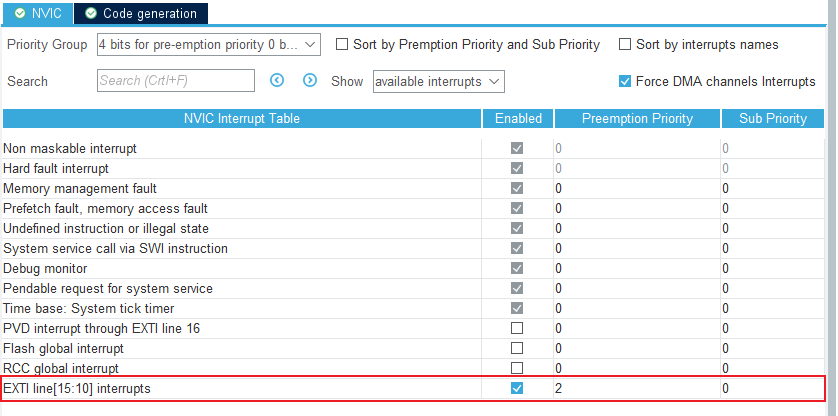
下面通过程序来实现按键的消抖。下例中的开发板MCU为stm32f103RCT6, 按键接在PB12、PB13引脚,LED接在PC0、PC1引脚。程序基于HAL库编写,外设的初始化程序由Stm32CubeMx软件生成,此处不再赘述。
int main(void)
{
while (1)
{
if (HAL_GPIO_ReadPin(Button1_GPIO_Port, Button1_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(20);
if(HAL_GPIO_ReadPin(Button1_GPIO_Port, Button1_Pin) == GPIO_PIN_RESET)
{
printf("Key 1 pressed.\n");
HAL_GPIO_TogglePin(Led1_GPIO_Port, Led1_Pin);
while(HAL_GPIO_ReadPin(Button1_GPIO_Port, Button1_Pin) == GPIO_PIN_RESET); // 等待按键松开
}
}
}
}
上面的方式,按键松开之前程序一直卡在while循环里,按键松开之后才能处理其他的程序。
int main(void)
{
uint8_t Button1PressedFlag = 0;
uint8_t Button2PressedFlag = 0;
while (1)
{
if (Button1PressedFlag == 0 && HAL_GPIO_ReadPin(Button1_GPIO_Port == Button1_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(20);
if(HAL_GPIO_ReadPin(Button1_GPIO_Port, Button1_Pin) == GPIO_PIN_RESET)
{
printf("Key 1 pressed.\n");
HAL_GPIO_TogglePin(Led1_GPIO_Port, Led1_Pin);
Button1PressedFlag = 1;
}
}
if(Button1PressedFlag == 1 && HAL_GPIO_ReadPin(Button1_GPIO_Port, Button1_Pin) == GPIO_PIN_SET)
{
HAL_Delay(20);
if(HAL_GPIO_ReadPin(Button1_GPIO_Port, Button1_Pin) == GPIO_PIN_SET)
{
printf("Key 1 released.\n");
Button1PressedFlag = 0;
}
}
if (Button2PressedFlag == 0 && HAL_GPIO_ReadPin(Button2_GPIO_Port, Button2_Pin) == GPIO_PIN_RESET)
{
HAL_Delay(20);
if(HAL_GPIO_ReadPin(Button2_GPIO_Port, Button2_Pin) == GPIO_PIN_RESET)
{
printf("Key 2 pressed.\n");
HAL_GPIO_TogglePin(Led2_GPIO_Port, Led2_Pin);
Button2PressedFlag = 1;
}
}
if(Button2PressedFlag == 1 && HAL_GPIO_ReadPin(Button2_GPIO_Port, Button2_Pin) == GPIO_PIN_SET)
{
HAL_Delay(20);
if(HAL_GPIO_ReadPin(Button2_GPIO_Port, Button2_Pin) == GPIO_PIN_SET)
{
printf("Key 2 released.\n");
Button2PressedFlag = 0;
}
}
}
}
上面实现的是两个按键消抖的处理。非阻塞方式可实现两个LED灯的同时点亮和熄灭,阻塞方式只能一个一个地操作。
void EXTI15_10_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_12);
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_13);
} // EXTI15_10_IRQHandler 中断ISR 有CubeMx生成
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == GPIO_PIN_12)
{
printf("Button triggered!\n");
HAL_Delay(20);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_12) == GPIO_PIN_RESET)
{
HAL_GPIO_TogglePin(Led1_GPIO_Port, Led1_Pin);
printf("Led toggled!\n");
}
}
if(GPIO_Pin == GPIO_PIN_13)
{
HAL_Delay(20);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_13) == GPIO_PIN_RESET)
{
HAL_GPIO_TogglePin(Led2_GPIO_Port, Led2_Pin);
}
}
} // 中断回调函数 按键按下之后执行的动作由自己编写
⑤. 最后,还需修改一下HAL库中的外部GPIO中断服务函数
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
{
/* EXTI line interrupt detected */
if (__HAL_GPIO_EXTI_GET_IT(GPIO_Pin) != 0x00u)
{
// __HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin); 注释此行
HAL_GPIO_EXTI_Callback(GPIO_Pin);
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin); // 添加此行
}
}
关于中断消抖的方式,有几个需要注意的点。以上只是实现过程的描述,具体细节下一篇更新
我试图获取一个长度在1到10之间的字符串,并输出将字符串分解为大小为1、2或3的连续子字符串的所有可能方式。例如:输入:123456将整数分割成单个字符,然后继续查找组合。该代码将返回以下所有数组。[1,2,3,4,5,6][12,3,4,5,6][1,23,4,5,6][1,2,34,5,6][1,2,3,45,6][1,2,3,4,56][12,34,5,6][12,3,45,6][12,3,4,56][1,23,45,6][1,2,34,56][1,23,4,56][12,34,56][123,4,5,6][1,234,5,6][1,2,345,6][1,2,3,456][123
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
question的一些答案关于redirect_to让我想到了其他一些问题。基本上,我正在使用Rails2.1编写博客应用程序。我一直在尝试自己完成大部分工作(因为我对Rails有所了解),但在需要时会引用Internet上的教程和引用资料。我设法让一个简单的博客正常运行,然后我尝试添加评论。靠我自己,我设法让它进入了可以从script/console添加评论的阶段,但我无法让表单正常工作。我遵循的其中一个教程建议在帖子Controller中创建一个“评论”操作,以添加评论。我的问题是:这是“标准”方式吗?我的另一个问题的答案之一似乎暗示应该有一个CommentsController参
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
说在前面这部分我本来是合为一篇来写的,因为目的是一样的,都是通过独立按键来控制LED闪灭本质上是起到开关的作用,即调用函数和中断函数。但是写一篇太累了,我还是决定分为两篇写,这篇是调用函数篇。在本篇中你主要看到这些东西!!!1.调用函数的方法(主要讲语法和格式)2.独立按键如何控制LED亮灭3.程序中的一些细节(软件消抖等)1.调用函数的方法思路还是比较清晰地,就是通过按下按键来控制LED闪灭,即每按下一次,LED取反一次。重要的是,把按键与LED联系在一起。我打算用K1来作为开关,看了一下开发板原理图,K1连接的是单片机的P31口,当按下K1时,P31是与GND相连的,也就是说,当我按下去时
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO