W25Q128数据手册总结:
W25Q128FV串行Flash内存由可编程的65536页组成,每一页256字节。可以在一时间编程高达256字节的内存。擦除内存可以是按16个页擦除(即一个Sector),128个页擦除(八个Sector),256个页擦除(16个Sector),或者整片擦除。标准SPI通信支持时钟频率高达104MHz,Dual SPI通信支持时钟频率高达208MHz,QSPI通信支持时钟频率高达416MHz。
常见的引脚封装如下:
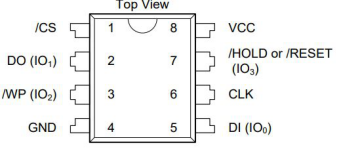
(1) /CS片选
使能或者失能SPI设备的操作。当CS为高电平是设备未选中,串行数据线处于高阻抗状态。注意,低电平选中芯片。
(2) DO(IO1)数据输出(数据输入输出1)
标准SPI模式下的MISO,QSPI模式下的双向数据线IO1。
(3) /WP(IO2)写保护输入(数据输入输出2)
该引脚用于阻止状态寄存器被写。与状态寄存器中块保护(CMP、SEC、TB、BP2、BP1和BP0)位和状态寄存器保护位(SRP)一起使用,一个小到4KB扇区的部分或整个内存阵列可以被硬件保护。注意/WP引脚低电平有效。当状态寄存器2的QE位被设置为Quad IO时,/WP引脚功能是不可用的,因为这个引脚被用于IO2。
(4) GND地
(5) DI(IO0)数据输入(数据输入输出0)
标准SPI模式下的MOSI,QSPI模式下的双向数据线IO0。
(6) CLK串行时钟输入
(7) /HOLD or /RESET(IO3)保持或者复位输入(数据输入输出3)
/HOLD引脚允许设备在主动选择时暂停。当该引脚为低电平,并且选中芯片,DO引脚处于高阻态,DI和CLK引脚上的信号直接忽略。当HOLD引脚为高电平时,设备可以恢复运行。当多个设备共享相同的SPI信号时,Hold功能就发挥出来了。当状态寄存器2中的QE位被设置成Quad I/O时,HOLD引脚功能是不可以用的,因为这个引脚是被用于IO3。
还有就是这个引脚还有一个名字RESET,复位是低电平有效。当QE=0,IO3引脚可以通过状态寄存器配置为HOLD或者reset。
(8) VCC电源供应
当我们使用标准的SPI总线时,数据线只是第2脚和第5脚,四线的SPI使用/WP作IO2,使用/HOLD或者/RESET作IO3。
首先W25Q引出一个SPI接口实现通讯基础,具备几个控制和状态寄存器,在写保护逻辑和内存编码上的内存分配大致都是分成64KB的块,4KB的扇区,256Byte的页,例如W25Q128,内存为16MByte(128Mbits/8bit),它有256个块,每个块有16个扇区,每个扇区有16页。
仅仅3个状态/配置寄存器
状态寄存器:
读状态寄存器1、2、3指令可以用来提取闪存阵列可用性状态、设备是否是写使能、写保护状态、Quad SPI设置、保密寄存器上锁状态、擦除/编程挂起状态、输出驱动力、上电和当前地址模式。写状态寄存器指令可以用于配置写保护、Quad SPI设置、保密寄存器OTP锁、HOLD/RESET功能切换、输出驱动力、上电地址模式。对状态寄存器的写访问是由非易失性状态寄存器保护位(SRPO, SRP1)的状态控制的。
状态寄存器1:

每个位的介绍:
(1) Erase/Write In Progress(BUSY)(只读)
当设备正在执行页编程、Quad页编程、扇区擦除、块擦除、芯片擦除、写状态寄存器或者执行擦除、编程保密寄存器指令的时候,硬件置1。在此期间设备忽视其他指令。当完成上述操作之后有自动恢复为0表示不繁忙。
(2) Write Enable Latch(WEL)(只读)
当接收到写使能指令之后该位置为1;当设备写失能之后该位清0。
(3) Block Protect Bits(BP2,BP1,BP0)(读写)
这3个位提供写保护控制和状态。一般情况下用不着,除非怕别人抄板读取信息。
(4) TB(可写)
非易失性的上/下位(TB)控制块保护位(BP2, BP1, BPO)是否保护数组的上(TB=0)或下(TB=1),如状态寄存器内存保护表所示。出厂默认设置为TB-0。TB位可以根据SRPO、SRP1和WEL位的状态通过写状态寄存器指令来设置。
该位配合BP2,BP1,BP0控制着着保护哪一块区域的内存,具体可以看看手册上的状态寄存器内存保护表(Status Register Memory Protection Table)。
(5) SEC(可写)
该位为1表示保护的是4KB扇区,为0表示保护的是64KB扇区。同样可以参考状态寄存器的内存保护表。
(6) SRP0(可写)
配合SRP1和WP引脚来决定写保护的方式。有软件保护、硬件保护、电源供应上锁、一次性可编程保护。
状态寄存器2:

(1) Erase/Program Suspend Status(SUS)(只读)
当执行擦除/编程挂起(75H)指令时,该位置1。当执行擦除/编程恢复指令(7AH),或者断电上电时该位为0。
(2) Security Register Lock Bits(LB3,LB2,LB1)(一次性可编程)
出厂时这3个位为0,此时保密寄存器不上锁。LB3-1是一次性编程的,如果置位1之后就不能修改了,同时相应的256字节保密寄存器将永久的变为只读,不可修改。
(3) Quad Enable(QE)(可写)
用于切换标准SPI或者是Quad SPI,当该位为0,WP引脚和HOLD引脚使能。当该位为1,WP引脚变为IQ2功能,HOLD变为IO3功能。该位置位1之后,可以发送38H(Enter QPI)指令切换到QSPI模式。如果没有置1就发送Enter QPI指令是没用的。在QSPI模式下,写状态寄存器命令是无法改变QE的。
状态寄存器3:

(1) Write Protect Selection(WPS)(可写)
该位用于选择写保护方案。为0使用的方案是CMP,SEC,TB,BP[2:0]位保护指定内存。为1使用的方案是个人块锁存。
(2) Output Driver Strength(DRV1,DRV0)(可写)
用于读操作期间,默认为11,强度最低,最大的话就设置成00。这个应该是跟SPI驱动力有关的,了解下即可。
(3) /HOLD or /RESET Pin Function(HOLD/RST)(可写)
用于选择对应硬件引脚的功能是HOLD还是RESET。当QE为1,该位不起作用。该位如果是1,对应引脚是复位的功能,否则是HOLD的功能。


上面的两个表上的指令可以使用标准/Dual/Quad SPI操作。
而下面的这个表指令仅仅适用于QSPI:


可以从发送指令06H的波形得知标准SPI的模式是0,即时钟的空闲电平是低电平,第一个时钟上升沿采集数据。高位在前。
通过发送0x3B(fast read dual output)的波形分析了解,主机正常通过DI数据线发送指令和24bits的地址给从机,随后主机发出8个虚时钟,最后从机的DI和DO数据线回传数据,四个时钟周期一个字节,比标准的快了一倍。

通过发送0x0B(fast read)的波形分析了解,有四根数据线,并且都是双向的,主机先发送指令和地址,接着发送虚时钟,然后在提供时钟去读从机数据。由波形可以看出两个时钟就能传递一个字节,速度加快了很多。

我们使用内存就是想来存放数据的,涉及到读写,所以我们的需求有:读内存和写内存。写内存的时候都需要注意Flash的一个通病,那就是Flash编程只能将1写为0,而不能将0写成1。所以我们需要在写内存的时候将内存擦除,使用内存擦除指令擦除内存,内存变为0xFF,然后再写内存。有时候我们可能要格式化内存,那么就还需要整片擦除指令。最后值得考虑的是,任何一款芯片都会有状态寄存器,我们在操作芯片的时候都需要先了解芯片的状态如何。那么针对使用标准SPI通信,梳理一下我们大致用到的指令有:
Write Enable(0x06)
Write Disable(0x04)
Read Status Register-1(0x05)
Write Status Register-1(0x01)
Read Status Register-2(0x35)
Write Status Register-2(0x31)
Read Status Register-3(0x15)
Write Status Register-3(0x11)
Chip Erase(0xC7/0x60)
Manufacturer/Device ID(0x90)
JEDEC ID(0x9F)
Read Unique ID(0x4B)
Page Program(0x02)
Sector Erase(4KB)(0x20)
Block Erase(32KB)(0x52)
Block Erase(64KB)(0xD8)
Read Data(0x03)
Fast Read(0x0B)
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
有时我需要处理键/值数据。我不喜欢使用数组,因为它们在大小上没有限制(很容易不小心添加超过2个项目,而且您最终需要稍后验证大小)。此外,0和1的索引变成了魔数(MagicNumber),并且在传达含义方面做得很差(“当我说0时,我的意思是head...”)。散列也不合适,因为可能会不小心添加额外的条目。我写了下面的类来解决这个问题:classPairattr_accessor:head,:taildefinitialize(h,t)@head,@tail=h,tendend它工作得很好并且解决了问题,但我很想知道:Ruby标准库是否已经带有这样一个类? 最佳
几个月前,我读了一篇关于rubygem的博客文章,它可以通过阅读代码本身来确定编程语言。对于我的生活,我不记得博客或gem的名称。谷歌搜索“ruby编程语言猜测”及其变体也无济于事。有人碰巧知道相关gem的名称吗? 最佳答案 是这个吗:http://github.com/chrislo/sourceclassifier/tree/master 关于ruby-寻找通过阅读代码确定编程语言的rubygem?,我们在StackOverflow上找到一个类似的问题:
我正在尝试使用Curbgem执行以下POST以解析云curl-XPOST\-H"X-Parse-Application-Id:PARSE_APP_ID"\-H"X-Parse-REST-API-Key:PARSE_API_KEY"\-H"Content-Type:image/jpeg"\--data-binary'@myPicture.jpg'\https://api.parse.com/1/files/pic.jpg用这个:curl=Curl::Easy.new("https://api.parse.com/1/files/lion.jpg")curl.multipart_form_
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
一、引擎主循环UE版本:4.27一、引擎主循环的位置:Launch.cpp:GuardedMain函数二、、GuardedMain函数执行逻辑:1、EnginePreInit:加载大多数模块int32ErrorLevel=EnginePreInit(CmdLine);PreInit模块加载顺序:模块加载过程:(1)注册模块中定义的UObject,同时为每个类构造一个类默认对象(CDO,记录类的默认状态,作为模板用于子类实例创建)(2)调用模块的StartUpModule方法2、FEngineLoop::Init()1、检查Engine的配置文件找出使用了哪一个GameEngine类(UGame
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
文章目录一、概述简介原理模块二、配置Mysql使用版本环境要求1.操作系统2.mysql要求三、配置canal-server离线下载在线下载上传解压修改配置单机配置集群配置分库分表配置1.修改全局配置2.实例配置垂直分库水平分库3.修改group-instance.xml4.启动监听四、配置canal-adapter1修改启动配置2配置映射文件3启动ES数据同步查询所有订阅同步数据同步开关启动4.验证五、配置canal-admin一、概述简介canal是Alibaba旗下的一款开源项目,Java开发。基于数据库增量日志解析,提供增量数据订阅&消费。Git地址:https://github.co
我正在尝试在Rails上安装ruby,到目前为止一切都已安装,但是当我尝试使用rakedb:create创建数据库时,我收到一个奇怪的错误:dyld:lazysymbolbindingfailed:Symbolnotfound:_mysql_get_client_infoReferencedfrom:/Library/Ruby/Gems/1.8/gems/mysql2-0.3.11/lib/mysql2/mysql2.bundleExpectedin:flatnamespacedyld:Symbolnotfound:_mysql_get_client_infoReferencedf
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,