本文主要内容是games101在本机下的环境搭建,主要有VS的下载与安装,Eigen库的下载与配置,OpenCV的下载与配置,主要解决的bug是LNK2019 无法解析的外部符号 “public: __thiscall cv::Mat::Mat(void)” ,希望能给各位想做games101作业的带来帮助,减少环境配置上的困难,后续也会陆续相关的作业题。
games101本机环境搭建
直接进入Visual Studio的官网下载最新的2022版,下载社区版即可,社区版是专门供给学习使用的,是免费的;专业版和企业版是要收费的。

如果是因为其他原因,比如身边人使用的其他类似VS2019,然后也想下载2019版的话,也可以去历代版本的网站进行下载,同样是下载社区版。

下载下来之后双击setup文件即可自动安装Visual Studio Installer,我们安装Visual Studio即是通过Visual Studio Installer进行的。安装完毕后打开Visual Studio Installer,会让我们选择我们需要的组间,我们按需选择即可,此处我就只勾选了【使用C++的桌面开发】和【Visual Studio扩展开发】。

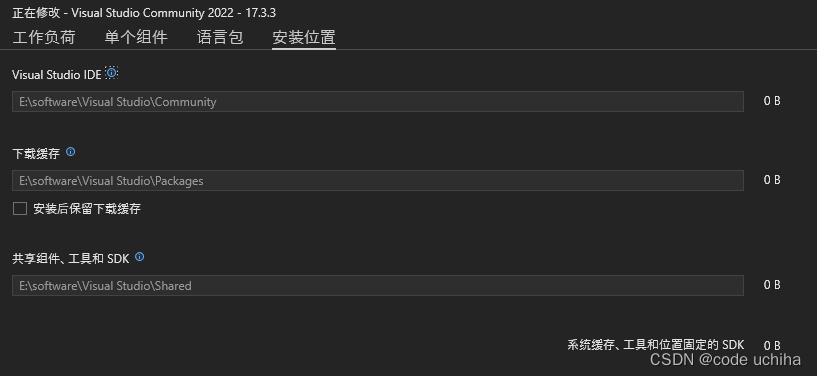
语言包选择中文还是什么随个人喜好,然后是安装位置,如果C盘不够富裕,那可以将其放入其他盘的对应文件夹,比如IDE,放入某个路径下新建的【Community】文件夹里,下载缓存放入【Packages】,共享组间等放入【Shared】中。
然后点击安装即可,此过程时间比较长。对于日后想要添加组间,也可以打开Visual Studio Installer,点击修改,然后就会来到选择组间的页面,即可添加需要的组间。

Eigen库主要是线性算数的C++模板库。可以用其完成矩阵的一系列操作,类似于python的numpy(打个比方)。
Eigen库的下载地址
下载之后进行解压缩,并放入自己的文件夹中,笔者此处放入的地址是“D:\tools\eigen-3.4.0”。
1. 首先是确定自己的项目配置(Debug还是Release)和平台(×86还是×64),这点很重要,Debug对应的是调试,Release对应的是发布。建议直接使用Debug -> ×64。

2. 其次是介绍操作的位置,我们打开一个Visual Studio项目后,点开项目,找到我们这个项目的项目属性,如下图所示。

3. 来到【VC++目录】->【包含目录】下,在其中添加Eigen库的地址,此处为统一,建议选到Eigen文件夹,具体如下所示:
D:\tools\eigen-3.4.0\eigen-3.4.0\Eigen
添加的具体方法如下:

至此,Eigen库的配置已完成
既然Eigen库的位置不同,那么自然需要对源码的#include地址发生一些改动,那就是将源码中#include Eigen的地方换成如下的代码。
#include <Eigen>
opencv是机器视觉和机器学习的常用库,此处的作业主要用其中关于图片的相关函数。
首先是需要下载opencv包,点击前方链接,可以跳转到网站,选择你需要的版本以及自身电脑的系统点击即可,此处就直接用最新版的window系统作为演示。

在我们点击完windows后,会跳转至如下页面,等倒计时结束浏览器会自动开始下载opencv包,其是一个exe文件,找到下载好的exe文件双击,即可进行解压缩,我们可以指定解压缩的路径,此处笔者就以**“D:tools/opencv”文件夹为例,解压缩的过程即可以理解为opencv安装了。

之后我们需要将opencv配置到环境变量中去,可以在我的电脑右击 --> 高级系统设置,如下所示,也可以直接win + q,搜索高级系统设置**。

进入到高级系统设置后选择高级选项卡,点击环境变量,里面有两个可以选择,一个是用户变量,一个是系统变量。这两个变量的顺序是,如果用户没有给出绝对路径,那么首先在自己的目录下查找,如果查找不到,则进入系统变量中查找,如果还是未查找到,则进入用户变量中查找,其中的变量Path告诉系统可执行文件的位置。

我们直接在系统变量中添加,也可以根据需要自己选择是在用户变量还是系统变量。选择Path,然后点击编辑,在如下的界面中点击新建,将红框中的目录添加进去。

至此环境变量中的配置完成,接下来需要在Viusal studio中进行配置。
1. 首先是确定自己的项目配置(Debug还是Release)和平台(×86还是×64),这点很重要,Debug对应的是调试,Release对应的是发布。后面bug篇会提到相关的配置bug。具体的查看位置如下,位于VS工具栏的下方。
此处建议大家还是改成Debug -> ×64。因为上面的Eigen库的配置便是如此。
2. 其次是介绍操作的位置,我们打开一个Visual Studio项目后,点开项目,找到我们这个项目的项目属性,如下图所示。
3. 之后是详细的文件配置,首先来到属性中的【VC++目录】中找到包含目录和库目录。
1). 【包含目录】中需要添加include文件夹,文件如下所示,详细目录还是得根据自身文件夹来。
D:\tools\opencv\build\include
2). 【库目录】中需要添加lib文件夹,文件如下所示
D:\tools\opencv\build\x64\vc14\lib
添加步骤如下所示:点开右边的下拉三角,然后进入到页面中,选择下面文字说的添加文件目录的按钮,然后进入文件选择,选择上方所说的对应文件夹,然后按下确定即可完成添加。

完成添加后的结果如下图所示,至此便完成了VC++目录部分的目录添加

4. 然后我们来到【C/C++】->【常规】->【附加包含目录】选项卡下进行添加,添加内容与【VC++目录】->【包含目录】中的一致,添加文件夹如下所示。
D:\tools\opencv\build\include
添加完成的结果如下所示:

5. 最后我们需要来到【链接器】->【输入】->【附加依赖项】添加lib文件。这里添加的文件均以opencv_worldxxx.lib为特征,可以进行查找,这里我的是opencv_world460.lib和opencv_world460d.lib,二者的区别在于不带d的文件用于我们第一步介绍的Release环境,带d的版本用于Debug环境。此处以我的为例,直接添加:
opencv_world460d.lib
添加方式如下:

至此,Opencv在Visual Studio中的配置已完成。
在games101的作业中,我们经常可以看到当我们要编译看结果的时候,需要在命令行输入参数,然后main函数的形参接受参数并执行相应的代码,那么放到VS中可不可以实现呢?答案是可以的。首先我们还是需要点开【项目属性】,之后找到【配置属性】->【调试】->【命令参数】输入我们需要给main 函数传递的参数,即作业运行中需要在命令行中输入的参数。
以作业3中的为例,我们如果是想看Blinn-phong结果,那么按照文档,我们需要在虚拟机终端输入./Rasterizer output.png phong。其中./Rasterizer是运行的文件,后面的output.png phong是我们需要的参数。那么我们可以在其中输入output.png phong,结果如下:

bug:“public: __thiscall cv::Mat::Mat(void)”
解决:项目配置不是Debug -> ×64。因为添加的文件中是×64,且连接器中是最后含d的lib文件。
opencv配置的绝大部分问题都是环境变量或者VS的配置问题,仔细比对后即可知道问题在哪,初学者基本不必参考太花哨的解决办法。实在没办法从以上两个环境中解决再去尝试其他博主提供的方法。
我有一个在Linux服务器上运行的ruby脚本。它不使用rails或任何东西。它基本上是一个命令行ruby脚本,可以像这样传递参数:./ruby_script.rbarg1arg2如何将参数抽象到配置文件(例如yaml文件或其他文件)中?您能否举例说明如何做到这一点?提前谢谢你。 最佳答案 首先,您可以运行一个写入YAML配置文件的独立脚本:require"yaml"File.write("path_to_yaml_file",[arg1,arg2].to_yaml)然后,在您的应用中阅读它:require"yaml"arg
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
之前在培训新生的时候,windows环境下配置opencv环境一直教的都是网上主流的vsstudio配置属性表,但是这个似乎对新生来说难度略高(虽然个人觉得完全是他们自己的问题),加之暑假之后对cmake实在是爱不释手,且这样配置确实十分简单(其实都不需要配置),故斗胆妄言vscode下配置CV之法。其实极为简单,图比较多所以很长。如果你看此文还配不好,你应该思考一下是不是自己的问题。闲话少说,直接开始。0.CMkae简介有的人到大二了都不知道cmake是什么,我不说是谁。CMake是一个开源免费并且跨平台的构建工具,可以用简单的语句来描述所有平台的编译过程。它能够根据当前所在平台输出对应的m
注意:本文主要掌握DCN自研无线产品的基本配置方法和注意事项,能够进行一般的项目实施、调试与运维AP基本配置命令AP登录用户名和密码均为:adminAP默认IP地址为:192.168.1.10AP默认情况下DHCP开启AP静态地址配置:setmanagementstatic-ip192.168.10.1AP开启/关闭DHCP功能:setmanagementdhcp-statusup/downAP设置默认网关:setstatic-ip-routegeteway192.168.10.254查看AP基本信息:getsystemgetmanagementgetmanaged-apgetrouteAP配
1.1.1 YARN的介绍 为克服Hadoop1.0中HDFS和MapReduce存在的各种问题⽽提出的,针对Hadoop1.0中的MapReduce在扩展性和多框架⽀持⽅⾯的不⾜,提出了全新的资源管理框架YARN. ApacheYARN(YetanotherResourceNegotiator的缩写)是Hadoop集群的资源管理系统,负责为计算程序提供服务器计算资源,相当于⼀个分布式的操作系统平台,⽽MapReduce等计算程序则相当于运⾏于操作系统之上的应⽤程序。 YARN被引⼊Hadoop2,最初是为了改善MapReduce的实现,但是因为具有⾜够的通⽤性,同样可以⽀持其他的分布式计算模
我是ruby的新手,正在配置IRB。我喜欢pretty-print(需要'pp'),但总是输入pp来漂亮地打印它似乎很麻烦。我想做的是默认情况下让它漂亮地打印出来,所以如果我有一个var,比如说,'myvar',然后键入myvar,它会自动调用pretty_inspect而不是常规检查。我从哪里开始?理想情况下,我将能够向我的.irbrc文件添加一个自动调用的方法。有什么想法吗?谢谢! 最佳答案 irb中默认pretty-print对象正是hirb被迫去做。Theseposts解释hirb如何将几乎所有内容转换为ascii表。虽
我想在IRB中浏览文件系统并让提示更改以反射(reflect)当前工作目录,但我不知道如何在每个命令后进行提示更新。最终,我想在日常工作中更多地使用IRB,让bash溜走。我在我的.irbrc中试过这个:require'fileutils'includeFileUtilsIRB.conf[:PROMPT][:CUSTOM]={:PROMPT_N=>"\e[1m:\e[m",:PROMPT_I=>"\e[1m#{pwd}>\e[m",:PROMPT_S=>"FOO",:PROMPT_C=>"\e[1m#{pwd}>\e[m",:RETURN=>""}IRB.conf[:PROMPT_MO
我正在使用Ruby/Mechanize编写一个“自动填写表格”应用程序。它几乎可以工作。我可以使用精彩CharlesWeb代理以查看服务器和我的Firefox浏览器之间的交换。现在我想使用Charles查看服务器和我的应用程序之间的交换。Charles在端口8888上代理。假设服务器位于https://my.host.com。.一件不起作用的事情是:@agent||=Mechanize.newdo|agent|agent.set_proxy("my.host.com",8888)end这会导致Net::HTTP::Persistent::Error:...lib/net/http/pe
如果特定语言环境中缺少翻译,如何配置i18n以使用en语言环境翻译?当前已插入翻译缺失消息。我正在使用RoR3.1。 最佳答案 找到相似的question这里是答案:#application.rb#railswillfallbacktoconfig.i18n.default_localetranslationconfig.i18n.fallbacks=true#railswillfallbacktoen,nomatterwhatissetasconfig.i18n.default_localeconfig.i18n.fallback
对于我正在编写的Rails3应用程序,我正在考虑从本地文件系统上的XML、YAML或JSON文件中读取一些配置数据。重点是:我应该把这些文件放在哪里?Rails应用程序中是否有用于存储此类内容的默认位置?附带说明一下,我的应用程序部署在Heroku上。 最佳答案 我经常做的是:如果文件是通用配置文件:我在目录/config中创建一个YAML文件,每个环境有一个上层key如果我为每个环境(大项目)创建一个文件:我为每个环境创建一个YAML并将它们存储在/config/environments/然后我在加载YAML的地方创建了一个初始化