3.2实验2共射极单管放大器1
1.实验目的
1)研究晶体管的放大作用,掌握单管放大电路的主要性能指标及测量方法。
2)学会放大器静态工作点的调试方法,分析静态工作点对放大器非线性失真的影响。
3)进一步掌握实验室常用仪器的使用方法。
2.预习要求
1)复习共射极放大电路的基本工作原理
2)了解放大电路电压放大倍数、输入电阻、输出电阻和幅频特性的测试方法。
3)对图3-2所示电路进行Multisim仿真。通过仿真分析电路的静态工作点以及接负载情况下的电压放大倍数、上限频率和下限频率等指标。
3.实验原理
由一个晶体管组成的单管放大电路是最基本的放大电路。下面以NPN型晶体管组成的图3-2共射极单管放大器实验电路a)电路b)引脚共射极单管放大电路为例进行研究,电路如图3-2所示。
(1)静态工作点对放大器基本性能的影响
考查一个放大器的基本性能,主要是看它能否不失真地放大信号。为使放大器正常工作,必须设计合适的静态工作点。图3-2所示电路为工作点稳定的射极偏置实验电路图。它的偏置电路采用Rb1和Rb2组成分压电路,并在发射极中接有电阻R e以稳定放大器的静态工作点。
在图3-2所示电路中,当流过偏置电阻Rb1和Rb2的电流远大于晶体管VT的基极电流IB时(一般为5~10倍),静态工作点可用下式估算
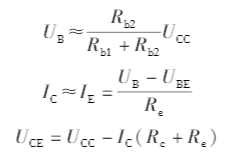
为了得到最大的不失真输出电压幅度,静态工作点应尽量选在交流负载线的中点。工作点选得过高会引起饱和失真,过低则会产生截止失真,饱和失真和截止失真统称为放大器的非线性失真。工作点“过高”或“过低”不是绝对的,应该是相对于信号的幅度而言,如输入信号幅度很小,即使工作点较高或较低也不一定会出现失真。对于小信号放大器来说,由于输出电压的幅度小,工作点不一定要选在负载线的中点,而可根据实际要求灵活选择。例如,希望放大器功耗小,工作点可适当选低些,希望放大器的增益高可使工作点适当选高些,等等,但均以不使输出电压的波形产生失真为宜。
(2)放大器静态工作点的测量与调试
1)静态工作点的测量。测量放大器的静态工作点。应在输入信号ui=0的情况下进行。即将放大器输入端与地端短接,然后选用量程合适的直流电压表,分别测量晶体管各极对地电位UB、UC和UE。实验中,为了避免断开集电极,一般采用测量电压。然后换算出各级电流的方法。例如Ic=(Ucc-Uc)/Rc。为了减小误差,提高测量精度。实验时应选用内阻较高的直流电压表。
2)静态工作点的调试。改变电路参数Ucc、Rc、Rp、R1、Rb2、Re都会引起静态工作点的变化。但通常多采用调节偏置电阻Rp的方法来改变电路的静态工作点。调节RP使之减小。即增大Ic,使工作点沿负载线上移进入饱和区。用示波器观察输出波形。看到输出波形的负半周被削底,如图3-3a所示.测量此时的输出电压,应比正常放大无失真时有所减小。但由于晶体管输出特性曲线中,Ic越大(在一定范围内),相应的电流放大系数β值会有所增加。以至于有饱和失真时的输出电压幅度与正常放大无失真时的输出电压幅度相比。减小的程度不甚明显。有时反而会增加.调节Rp使之增大,即减小Ic,使工作点沿负载线下移进入截止区。此时用示波器观察放大器输出电压波形。会看到波形的正半周被缩顶。如图3-3b所示.测量失真后的输出电压幅度,其值应比无失真时要小。

(3)放大电路动态指标测量调整放大器到合适的静态工作点后,输入交流信号us,这时电路处于动态工作状态,图3-4测量放大电路动态指标原理图放大电路的基本性能指标主要是动态参数,包括电压放大倍数、输入电阻、输出电阻、频率响应特性等。这些参数必须在输出信号不失真的情况下才有意义。测量放大电路动态指标的原理如图3-4所示。
1)电压放大倍数Au的测量。电压放大倍数Au是指输出电压uo与输入电压ui的有效值之比,即
2)输入电阻Ri的测量。输入电阻是表明放大电路从信号源吸取电流大小的参数,Ri越大,放大电路从信号源吸取的电流则越小,反之则越大。如图3-4所示,放大器的输入电阻是从放大器输入端看进去的等效电阻,即
测量交流电流 比较困难,通常采用换算法测量Ri,测量电路如图3-4所示。图中R为串入输入信号与放大电路之间的一个已知阻值的外接电阻。用交流电压表分别测出
比较困难,通常采用换算法测量Ri,测量电路如图3-4所示。图中R为串入输入信号与放大电路之间的一个已知阻值的外接电阻。用交流电压表分别测出 和
和 ,则输入电阻为
,则输入电阻为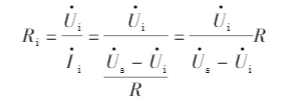
电阻R的值不宜取得过大或过小,以免产生较大的测量误差,通常取R与Ri同一数量级。本实验可取R≈(1~2)kΩ。
3)输出电阻Ro的测量。输出电阻是表明放大电路带负载的能力,Ro越大,表明放大电路带负载的能力越差,反之则越强。输出电阻Ro是将信号源短路,负载RL开路时从输出端向放大器看进去的等效电阻。可以采用替换法测量Ro。如图3-4所示,分别测出不带负载RL时的输出电压 和带负载时的输出电压
和带负载时的输出电压 ,即可间接地推算出Ro的大小。根据
,即可间接地推算出Ro的大小。根据 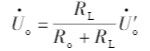
可求出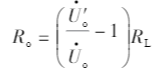
测量时应注意两次测量时的输入电压信号大小应保持不变,且大小适当,以保证输出波形不失真。通常取RL与Ro同一数量级。注意:放大倍数、输入电阻、输出电阻通常都是在正弦信号下的交流参数,只有在放大电路处于放大状态且输出不失真的条件下才有意义。对于图3-2所示射极偏置电路,电压放大倍数 输入电阻Ri=Rb1∥Rb2∥rbe输出电阻Ro≈Rc
输入电阻Ri=Rb1∥Rb2∥rbe输出电阻Ro≈Rc
(4)放大器幅频特性的测量放大器的幅频特性是指在输入正弦信号幅值不变的情况下,输出随频率连续变化的稳态响应,即不同频率信号时的电压放大倍数。晶体管内部的极间电容和电路中的耦合旁路电容图3-5幅频特性曲线是影响放大器频率特性的主要因素。单管阻容耦合放大电路的幅频特性曲线如图3-5所示。Aum为中频电压放大倍数,通常规定电压放大倍数随频率变化下降到中频放大倍数的0.707倍时所对应的频率分别为下限频率fL和上限频率fH。fL与fH之间的频带称为通频带(BW)。BW=fH-fL测量放大器的频率特性时,可维持输入信号的幅度不变,改变其频率。首先测出放大器在中频时的输出电压Uom,然后分别上调和下调频率,直到输出电压降到0.707Uom为止,此时所对应的两个频率分别是上限频率fH和下限频率fL。

4.实验内容
(1)实验参考电路实验参考电路和参数如图3-2a所示,晶体管采用9013型号,β≈100~200,引脚如图3-2b所示。
按图3-2电路接线,检查无误后接通电源电压Ucc。
(2)静态工作点的测量与调整
将信号发生器提供f=1kHz,Us≈10mV(有效值)的正弦输入信号接到放大电路的输入端,放大电路的输出端接示波器。调节电位器Rp,使示波器上显示的输出电压波形最大且不失真,然后关闭信号发生器,使输入信号Ui=0。用数字万用表的直流电压档测量晶体管各电极的对地电压,完成表3-3。如果UCE=Uc-UE<0.5V,则说明晶体管工作在饱和状态ꎻ如果UCE≈Ucc,则说明晶体管已工作在截止状态。
(3)电压放大倍数的测量1)保持静态工作点不变。由信号发生器提供f=1kHz,Us≈10mV(有效值)的正弦输入信号,同时用示波器观测输出电压波形,保证其不失真。分别测量负载开路和接负载两种情况下的Uo值,并完成表3-4。注意:当不能得到满意的不失真输出波形时,可适当调节输入信号幅度,并记录在表3-4中。

2)用双踪示波器观察输出和输入的波形,比较它们之间相位、幅度的关系。
(4)观察静态工作点变化对输出波形的影响
输入信号f=1kHz,Us≈10mV。调节电位器,逐渐减小或增大Rp,用示波器观察输出波形的失真情况,测量相应的静态工作点,并完成表3-5。

(5)放大电路幅频特性的测量保持输入信号的幅度不变,根据表3-4数据,计算出U=0.707Uo值的大小。增大和减小信号源频率f,观察输出电压的变化。当输出电压下降到U=0.707Uo时,所对应的频率分别是上限频率fH和下限频率fL。记录数据于表3-6中。

(6)设计测量输入电阻和输出电阻的方法并自拟记录表格参照实验原理中介绍的输入电阻和输出电阻的测量方法,设计测量电路并连接。输入信号f=1kHz,Us≈10mV,在输出电压不失真的情况下,测量输入电阻和输出电阻。
5.实验报告要求
1)画出实验电路与有关仪器的连接图。
2)记录整理实验数据,与理论估算值和仿真值进行比较,分析产生差异的原因。
3)讨论静态工作点变化对放大器输出波形的影响。
6.思考题
1)实验电路中,上偏置电阻Rb1起什么作用?是否可以只接Rp,不接R1?为什么?
2)为什么通过测量电压间接得到静态工作电流Ic,而不直接测出?
3)不用示波器观察波形,仅用数字万用表测量放大器输出电压是否正确,为什么?
实验内容记录如下
(1)实验电路连接如下

(2)静态工作点的测量
实验数据记录如下:
| UB/V | UE/V | UC/V | IC≈UE/Re (mA) |
| 4.1 | 3.434 | 5.185 | 3.434 |
实验截屏如下:

(3)电压放大倍数的测量
1)分别测量负载开路和接负载两种情况下的UO值,完成表格
| RL/Ω | US/V | UO/V | Au |
| ∞ | 0.010002 | 1.315 | 131.47 |
| 5.1k | 0.010002 | 1.076 | 107.58 |
实验截屏如下:


2)用双踪示波器观察输出输入波形,发现它们相差180度的相角,幅值之比为电压放大倍数值,波形如上图
(4)观察静态工作点变化对输出波形的影响
测量相应的静态工作点,记录如下表
|
| uo波形 | UCE/V | Ie≈UE/Re(mA) | 晶体管工作状态 |
| RP减小 |
| 0.069 | 4.28 | 饱和失真 |
| RP减小 |
| 10.64 | 0.457 | 截至失真 |
实验截屏如下


(5)放大电路幅频特性的测量
保持输入信号的幅度不变,计算出U=0.707Uo值的大小。增加和减小信号源频率f,记录对应的频率分别是上限频率fH和下限频率fL,完成下表:
| 测试值 | fH | fL |
| f/kHz | 2980000 | 860 |
| U/V | 0.758 | 0.758 |
实验截屏如下:


(6)测量输入电阻和输出电阻
1)输入电阻Ri的测量
串入电阻R阻值设为1.5kΩ,记录数据填入下表:
| Ui/V | Us/V | R/kΩ | Ri/ kΩ |
| 0.00422 | 0.009998 | 1.5 | 1.096 |
实验截屏如下:

2)输入电阻Ro的测量
串入电阻R阻值设为5.1kΩ,记录数据填入下表:
| Uo‘/V | Uo/V | RL/kΩ | Ro/ kΩ |
| 1.32 | 1.076 | 5.1 | 1.157 |
实验截屏如下:


6.思考题
(1)偏置电阻Rb1给晶体管提供了一个合适的工作点,提高了放大倍数,减小饱和失真。不可以只接Rp,不接R1。如果这样,当Rp较小时基极电压过高,集电结不能反偏,晶体管无法正常工作。
(2)因为Ic较小,直接测量万用表的内阻会对测量有较大影响,导致误差。同时会导致断开集电极。
(3)不正确,因为晶体管此时不一定工作在工作区。若工作在饱和区或者截止区输出电压会有较大的失真,数据没有准确性
目录0专栏介绍1平面2R机器人概述2运动学建模2.1正运动学模型2.2逆运动学模型2.3机器人运动学仿真3动力学建模3.1计算动能3.2势能计算与动力学方程3.3动力学仿真0专栏介绍?附C++/Python/Matlab全套代码?课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。?详情:图解自动驾驶中的运动规划(MotionPlanning),附几十种规划算法1平面2R机器人概述如图1所示为本文的研究本体——平面2R机器人。对参数进行如下定义:机器人广义坐标
一、机器人介绍 此处是基于MATLABRVC工具箱,对ABB-IRB-1200型号的微型机械臂进行正逆向运动学分析,并利Simulink工具实现对机械臂进行具有动力学参数的末端轨迹规划仿真,最后根据机械模型设计Simulink-Adams联合仿真。 图1.ABBIRB 1200尺寸参数示意图ABBIRB 1200提供的两种型号广泛适用于各作业,且两者间零部件通用,两种型号的工作范围分别为700 mm 和 900 mm,大有效负载分别为 7 kg 和5 kg。 IRB 1200 能够在狭小空间内能发挥其工作范围与性能优势,具有全新的设计、小型化的体积、高效的性能、易于集成、便捷的接
一、RIPV2协议简介 RIP(RoutingInformationProtocol)路由协议是一种相对古老,在小型以及同介质网络中得到了广泛应用的一种路由协议。RIP采用距离向量算法,是一种距离向量协议。RIP-1是有类别路由协议(ClassfulRoutingProtocol),它只支持以广播方式发布协议报文。RIP-1的协议报文无法携带掩码信息,它只能识别A、B、C类这样的自然网段的路由,因此RIP-1不支持非连续子网(DiscontiguousSubnet)。RIP-2是一种无类别路由协议(ClasslessRoutingProtocol),支持路由标记,在路由策略中可根据路由标记对
目录1.1访问Cisco路由器的方法1.1.1通过Console口访问路由器1.1.2通过Telnet访问路由器1.1.3终端访问服务器1.2终端访问服务器配置命令汇总1.1访问Cisco路由器的方法 路由器没有键盘和鼠标,要初始化路由器需要把计算机的串口和路由器的Console口进行连接。访问Cisco路由器的方法还有Telnet、WebBrowser和网络管理软件(如CiscoWorks)等,本节讨论前2种。1.1.1通过Console口访问路由器 计算机的串口和路由器的Console口是通过反转线(Rollover)进行连接的,反转线的一端接在路由器的Console口上,另一
文章目录一、用户二、用户分类1、普通用户2、超级用户3、系统用户三、用户相关文件1、/etc/passwd文件2、/etc/shadow文件四、用户管理命令1、useradd2、adduser3、passwd4、usermod5、userdel一、用户Linux系统是一个多用户多任务的分时操作系统,任何一个要使用系统资源的用户都必须先向系统管理员申请一个账号,然后以这个账号的身份进入系统。在Linux系统中,任何文件都属于某一特定用户,而任何用户都隶属于至少一个用户组。用户名(username):每个用户账号都拥有一个惟一的用户名和各自的口令。用户在登录时键入正确的用户名和口令后,就能够进入系
文章目录实验要求实验思路IP地址规划路由实验配置R1上配置R2上配置R3上配置R4上配置R5上配置R6上配置R7上配置R8上配置R9上配置R10上配置R11上配置R12上配置实验测试R10pingR4的环回R10pingR12的环回R10pingR1实验要求R4为ISP,其只能配置IP地址;R4与其他所有直连设备间均使用公有IP;R3-R5/6/7为MGRE环境,R3为中心站点;整个OSPF环境IP基于172.16.0.0/16划分;所有设备均可访问R4的环回;减少LSA的更新量,加快收敛,保障更新安全;全网可达实验思路IP地址规划公网IP随便配置,这里我R3-R4的网段为34.1.1.0/2
1、单片机控制液晶显示模块1602LCD的显示。液晶显示器(LiquidCrystalDisplay,LCD)具有省电、体积小、抗干扰能力强等优点,LCD显示器分为字段型、字符型和点阵图形型。(1)字段型。以长条状组成字符显示,主要用于数字显示,也可用于显示西文字母或某些字符,广泛用于电子表、计算器、数字仪表中。(2)字符型。专门用于显示字母、数字、符号等。一个字符由5、7或5、10的点阵组成,在单片机系统中已广泛使用(3)点阵图形型。广泛用于图形显示,如笔记本电脑、彩色电视和游戏机等。它是在平板上排列的多行列的矩阵式的晶格点,点大小与多少决定了显示的清晰度。引脚包括8条数据线、3条控制线和3
首先我们得有一个数据库,数据库里有表职工表: 部门表:接下来的操作都是针对以上的表其次我们来建立登录用户createlogin王明withpassword='123456'--创建登录用户,登录名为王明,密码为123456.创建登录名之后,登录用户还不能对数据库进行操作,还要对登录用户创建数据库用户createuserU1forlogin王明--创建数据库用户关联登录用户这时候登录王明的账户,数据库会自动映射到数据库用户U1,由U1来进行对数据库的操作。不过,只创建了用户,而用户还没有获得对数据库的操作权力,我们就要对数据库用户进行权力分配有时间的小伙伴可以额外花点时间点击链接了解详细1)设置
C#面向对象程序设计课程实验五:实验名称:C#面向对象技术实验内容:C#面向对象技术一、实验目的及要求二、实验环境三、实验内容与步骤3.1、实验内容:测试类,实现多态3.2、实验步骤3.2.1、实验程序3.2.2、实验运行结果3.3、实验内容:创建一个Vehicle类,并将它声明为抽象类3.4、实验步骤3.4.1、实验程序3.4.2、实验运行结果四、实验总结实验内容:C#面向对象技术一、实验目的及要求(1)掌握类的继承特性;(2)学会使用C#实现类的继承性;(3)理解类的多态特性;(4)学会使用C#的方法重写;二、实验环境MicrosoftVisualStudio2008三、实验内容与步骤3.
实验题目bomblab实验目的使用gdb工具反汇编出汇编代码,结合c语言文件找到每个关卡的入口函数。然后分析汇编代码,分析得到每一关的通关密码。进一步加深对linux指令的理解,对gdb调试的一些基本操作以及高级操作有所了解。熟悉汇编程序,懂得如何利用汇编程序写出C语言程序伪代码,熟悉并掌握函数调用过程中的栈帧结构的变化,熟悉汇编程序及其调试方法。实验环境个人PC、Linux32位操作系统、Ubuntu16.04实验内容准备阶段将实验压缩包解压并找到本人所用到的实验文件夹bomb7,复制到linux系统中,打开文件夹得到bomb、bomb.c、README文件;阅读README等实验相关材料,

