智能车的元素的处理方案:环岛,坡道,三叉,以及直道和弯道的速度控制方案
元素处理分到了两篇文章中:本篇元素的处理方案以及全向组麦轮的特色控制方案。
开源代码地址: https://github.com/ittuann/Enterprise_E
博客目录:
https://blog.csdn.net/sorcererr/article/details/124989905
https://ittuann.github.io/2021/08/30/Car.html
我们对于环岛的识别使用的是稳定的电磁判断方案。内侧两个横向电感会在环岛切点处达到极值,以此来判断环岛。
入环时使用摄像头补线,并开始计算陀螺仪z轴积分。陀螺仪大于60度入环补线结束,陀螺仪大于200度开始摄像头识别出环,若出环判断失败陀螺仪大于250度强制开始出环,陀螺仪大于355度出环完成。
当陀螺仪大于100度小于225度时,累加环内转向环PID输出量,记录环内转角输出,目的是用环内计算环岛内平均打角。当出环预备标志位置1后,将计算值强制赋给转向环输出,实现出环使用稳定的环内姿态。出环不仅可以使用环内状态也可使用入环状态,我们测试发现使用环内姿态更为稳定。
电感判断环岛的问题在于出环后会重复判断,所以需要写一个出环后短时间0.8s内不再识别第二个环岛。
另外判断小环岛和大环岛 可以记录车身0-60度时间或是编码器脉冲数。
对于环内巡线,由于我们是30cm摄像头限高,所以使用正常巡线也能有不错的效果。但使用正常的摄像头中值会偏向一侧,可以在左右环岛分别赋予不同的摄像头中值。
环内属于稳定而又简单的元素,入环并判断车身稳定后可以环内加速。如果使用记录环内姿态用于出环,则出环速度需要与环内速度相同,相当于在环岛元素内只在入环减速其他时刻都在加速。
我们的控制方案三岔路口的一条路分为八步处理。
第零步是预判断三岔,预判断后将加速降为加速计算量的一半。毕竟要给三斤多的麦轮车留够减速的时间
当完全判断为三岔时,因为摄像头判断区域与车身实际位置存在距离,且在摄像头高度和角度不变的情况下,距离也不会变。所以第一步为前进一定距离至三岔中心点,同时开始90度旋转舵机。
第二步在前进完成后使车身旋转30度与入口赛道平行。这样可以防止仅摄像头补线输出值过大,进入三岔出现抖动的问题。
因为舵机旋转需要时间,且旋转完成后摄像头处理速度较慢,旋转完成时的摄像头输出值不稳定,旋转后不能立刻切为摄像头循迹。所以第三步为车身横向平移一定距离等待摄像头稳定。
第四步即为三岔内横向循迹。我们出现的情况是右三岔循迹良好左三岔严重偏向外侧,所以右三岔基础速度和加速最大值都会大于左三岔。另外对于三岔内偏向一侧也可以使用与环岛相同的处理办法,即左右分别赋予不同的摄像头中值。
第五步在预判断出三叉后开启转角输出限幅,限幅至仅能小幅度修正姿态,防止补线补到三岔的另一侧致使出三岔内切。并且也将加速降为加速计算量的一半。
第六步在判断到出三岔后前进一定距离至中心点,同时开始转正舵机,原因同第一步。
第七步在前进完成后使车身旋转150度。
第八步在旋转后前进一定距离,原因同第三步。至此三叉的一条边处理结束。左三叉也是相同的处理流程。
全向组在赛道上匀速循迹很大可能不会有一个较高的速度,所以直道加速就显得很有必要。我们使用了五种直道加速的判断条件。
判断图像上半部分中线与赛道两边界无交点即可加速。
for (i = startRow; i < endRow; i++) {
if ((endRow - startRow) < 5) {
break;
} //行数过少取消判断
if (middleStandard - leftBlack[i] > 4 && rightBlack[i] - middleStandard > 4) {
rowCount2++;
} else if (middleStandard - leftBlack[i] > 2 && rightBlack[i] - middleStandard > 2) {
rowCount++;
} else {
break;
}
if (rowCount == endRow - startRow) {
Gear = 8;
}
if (rowCount2 == endRow - startRow) {
Gear = 10;
}
} //判断中线上半部与赛道两边界无焦点即可加速
在正常计算中线误差的 for 循环内 当计算完前三分之一使用面积时,计算有效图像前三分之一的误差,用于远处判断加速。这样可以使运算更为高效。
分别计算speed_line为20, 25, 30这三行的误差,并取最大值用于判断加速。
speedLineErr = (ABS)(( 5 * middleLine[speedLine] +
2 * middleLine[speedLine + 1] +
3 * middleLine[speedLine - 1]) / (10) - middleStandard);
当有效行在顶部时,给予加速。可以简单使用分段打表的方式,也可以拟合成线性关系。记得写限幅!
实际走过一定距离的直道, 就算是直道。有些时候小s不会判断加速,这时只是用车身姿态来判断,可以解决这些正常判断较为难以处理的情况。注意这样加有滞后性, 加速量不要给多。
if (ABS((int16)(fabsf(carSpeedA))) < speedZone) {
disAccCount ++;
} else {
disAccCount = 0;
}
if (disAccCount >= 500) disAccCount = 500; //限幅
if (disAccCount > countZone) {
Gear = 3;
}
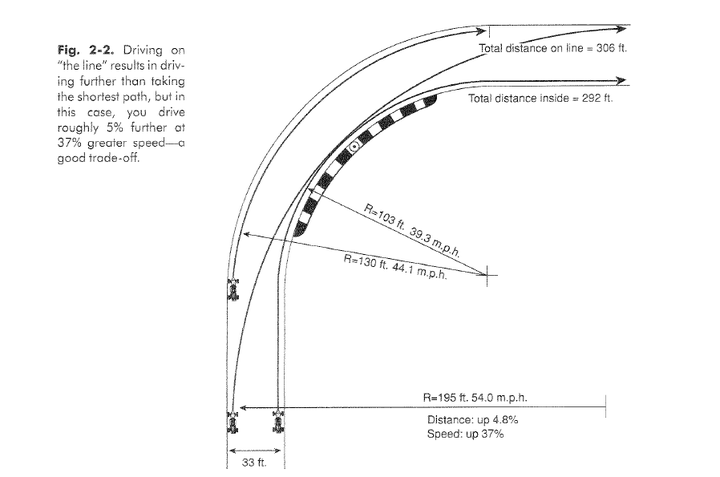
弯道的速度的公式 f = μ m g = m v 2 R f = \mu\ mg = m\ \frac{v^2}{R} f=μ mg=m Rv2 。F是摩擦力; μ \mu μ是摩擦系数,由地面和轮胎决定;R是转弯半径。由于地面和轮胎在过弯时是给定的,这样在比赛中我们为了保证V大,只能保证更大的转弯半径。R越大,速度V就越大。所以稳定沿着电磁线循迹并不一定是最优解,最好是采用外内外切弯。即入弯时贴弯道的内弯,出弯时贴外弯。这种情况下赛车通过整个弯道过程中行车线半径是固定的,即定曲率行车线。弯道的速度控制方案也最好为,入弯减速避免打滑,出弯加速节约时间。
实践中发现通过调整纯跟踪算法的预瞄距离就能够有这样的效果,可以有效提高路径规划的最优性。
元素处理分到了两篇文章中:本篇元素的处理方案以及全向组麦轮的特色控制方案。
我正在使用的第三方API的文档状态:"[O]urAPIonlyacceptspaddedBase64encodedstrings."什么是“填充的Base64编码字符串”以及如何在Ruby中生成它们。下面的代码是我第一次尝试创建转换为Base64的JSON格式数据。xa=Base64.encode64(a.to_json) 最佳答案 他们说的padding其实就是Base64本身的一部分。它是末尾的“=”和“==”。Base64将3个字节的数据包编码为4个编码字符。所以如果你的输入数据有长度n和n%3=1=>"=="末尾用于填充n%
Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
在MRIRuby中我可以这样做:deftransferinternal_server=self.init_serverpid=forkdointernal_server.runend#Maketheserverprocessrunindependently.Process.detach(pid)internal_client=self.init_client#Dootherstuffwithconnectingtointernal_server...internal_client.post('somedata')ensure#KillserverProcess.kill('KILL',
查看我的Ruby代码:h=Hash.new([])h[0]=:word1h[1]=h[1]输出是:Hash={0=>:word1,1=>[:word2,:word3],2=>[:word2,:word3]}我希望有Hash={0=>:word1,1=>[:word2],2=>[:word3]}为什么要附加第二个哈希元素(数组)?如何将新数组元素附加到第三个哈希元素? 最佳答案 如果您提供单个值作为Hash.new的参数(例如Hash.new([]),完全相同的对象将用作每个缺失键的默认值。这就是您所拥有的,那是你不想要的。您可以改用
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
本文主要介绍在使用Selenium进行自动化测试或者任务时,对于使用了iframe的页面,如何定位iframe中的元素文章目录场景描述解决方案具体代码场景描述当我们在使用Selenium进行自动化测试的时候,可能会遇到一些界面或者窗体是使用HTML的iframe标签进行承载的。对于iframe中的标签,如果直接查找是无法找到的,会抛出没有找到元素的异常。比如近在咫尺的例子就是,CSDN的登录窗体就是使用的iframe,大家可以尝试通过F12开发者模式查看到的tag_name,class_name,id或者xpath来定位中的页面元素,会抛出NoSuchElementException异常。解决
作为新的阿里云用户,您可以50免费试用多种优惠,价值高达1,700美元(或8,500美元)。这将让您了解和体验阿里云平台上提供的一系列产品和服务。如果您以个人身份注册免费试用,您将获得价值1,700美元的优惠。但是,如果您是注册公司,您可以选择企业免费试用,提交基本信息通过企业实名注册验证,即可开始价值$8,500的免费试用!本教程介绍了如何设置您的帐户并使用您的免费试用版。关于免费试用在我们开始此试用之前,您还必须遵守以下条款和条件才能访问您的免费试用:只有在一年内创建的账户才有资格获得阿里云免费试用。通过此免费试用优惠,用户可以免费试用免费试用活动页面上列出的每种产品一次。如果您有多个帐
我是HanamiWorld的新人。我已经写了这段代码:moduleWeb::Views::HomeclassIndexincludeWeb::ViewincludeHanami::Helpers::HtmlHelperdeftitlehtml.headerdoh1'Testsearchengine',id:'title'hrdiv(id:'test')dolink_to('Home',"/",class:'mnu_orizontal')link_to('About',"/",class:'mnu_orizontal')endendendendend我在模板上调用了title方法。htm
在Ruby中,是否有一种简单的方法可以将n维数组中的每个元素乘以一个数字?这样:[1,2,3,4,5].multiplied_by2==[2,4,6,8,10]和[[1,2,3],[1,2,3]].multiplied_by2==[[2,4,6],[2,4,6]]?(很明显,我编写了multiplied_by函数以区别于*,它似乎连接了数组的多个副本,不幸的是这不是我需要的)。谢谢! 最佳答案 它的长格式等价物是:[1,2,3,4,5].collect{|n|n*2}其实并没有那么复杂。你总是可以使你的multiply_by方法:c
我对图像处理完全陌生。我对JPEG内部是什么以及它是如何工作一无所知。我想知道,是否可以在某处找到执行以下简单操作的ruby代码:打开jpeg文件。遍历每个像素并将其颜色设置为fx绿色。将结果写入另一个文件。我对如何使用ruby-vips库实现这一点特别感兴趣https://github.com/ender672/ruby-vips我的目标-学习如何使用ruby-vips执行基本的图像处理操作(Gamma校正、亮度、色调……)任何指向比“helloworld”更复杂的工作示例的链接——比如ruby-vips的github页面上的链接,我们将不胜感激!如果有ruby-