目录
RGB LCD 都有一个背光控制引脚,给这个背光控制引脚输入高电平就会点亮背光,输入低电平就会关闭背光。假如我们不断的打开和关闭背光,当速度足够快时就不会感觉到背光关闭这个过程。这个正好可以使用 PWM 来完成, PWM 全称是 Pulse Width Modulation,也就是脉冲宽度调制
PWM 信号如图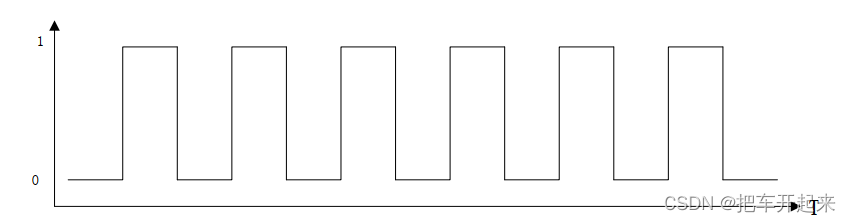
PWM 信号有两个关键的术语:频率和占空比,频率就是开关速度,把一次开关算作一个周期,那么频率就是 1 秒内进行了多少次开关。占空比就是一个周期内高电平时间和低电平时间的比例,一个周期内高电平时间越长占空比就越大,反之占空比就越小。占空比用百分之表示,如果一个周期内全是低电平那么占空比就是 0%,如果一个周期内全是高电平那么占空比就是100%。
给 LCD 的背光引脚输入一个 PWM 信号,这样就可以通过调整占空比的方式来调整LCD 背光亮度了。提高占空比就会提高背光亮度,降低占空比就会降低背光亮度。重点就在于PWM 信号的产生和占空比的控制, I.MX6U 提供了 PWM 外设,因此可以配置 PWM 外设来产生PWM 信号
I.MX6U PWM 结构框图如下
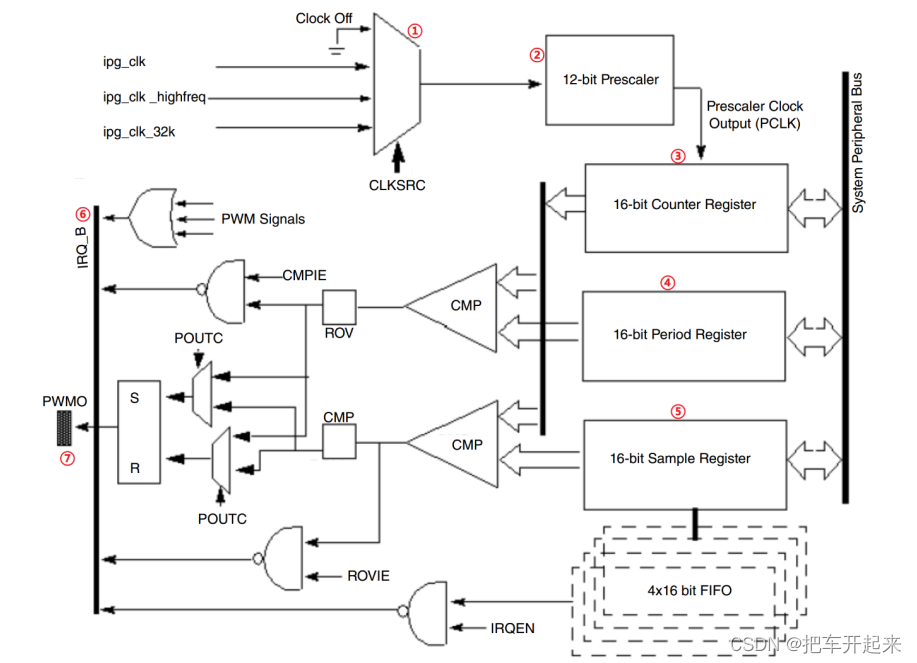
各部分功能如下:
①、此部分是一个选择器,用于选择 PWM 信号的时钟源,一共有三种时钟源: ipg_clk、
ipg_clk_highfreq 和 ipg_clk_32k。
②、这是一个 12 位的分频器,可以对①中选择的时钟源进行分频。
③、这是 PWM 的 16 位计数器寄存器,保存着 PWM 的计数值。
④、这是 PWM 的 16 位周期寄存器,此寄存器用来控制 PWM 的频率。
⑤、这是 PWM 的 16 位采样寄存器,此寄存器用来控制 PWM 的占空比。
⑥、此部分是 PWM 的中断信号, PWM 是提供中断功能的,如果使能了相应的中断的话就会产生中断。
⑦、此部分是 PWM 对应的输出 IO,产生的 PWM 信号就会从对应的 IO 中输出
PWM 的 16 位计数器是个向上计数器,此计数器会从 0X0000 开始计数,直到计数值等于寄存器 PWMx_PWMPR(x=1~8)+ 1,然后计数器就会重新从 0X0000 开始计数,如此往复。所以寄存器 PWMx_PWMPR 可以设置 PWM 的频率。
在一个周期内, PWM 从 0X0000 开始计数的时候, PWM 引脚先输出高电平(默认情况下,可以通过配置输出低电平)。采样寄存器PWMx_PWMSAR 中的FIFO 保存的采样值会在每个时钟和计数器值进行比较,当采样值和计数器相等的话 PWM 引脚就会改为输出低电平(默认情况下,同样可以通过配置输出高电平)。计数器会持续计数,直到和周期寄存器 PWMx_PWMPR(x=1~8) + 1 的值相等,这样一个周期就完成了。所以,采样 FIFO 控制着占空比,因此相当于 PWMx_PWMSAR 控制着占空比。至此, PWM 信号的频率和占空比设置就知道该如何去做了
PWM 开启以后会按照默认值运行,并产生 PWM 波形,而这个默认的 PWM 一般并不是需要的波形。因此,在开启 PWM 之前最好设置好 PWMx_PWMPR 和 PWMx_PWMSAR 这两个寄存器,也就是设置好 PWM 的频率和占空比,FIFO保存着采样值,当向PWMSAR寄存器写采样值的时候会写道FIFO里面,内每当读取一次PWMSAR寄存器,FIFO里面的数据都会减一,或者每产生一个PWM信号,FIFO的数据也会减一。直到FIFO为空,那么就无法再产生PWM信号。FIFO为空的时候会产生中断,可以在中断中向FIFO写入采样数据,也就是向PWMSAR写数据

LCD 背光控制引脚连接在BLT PWM
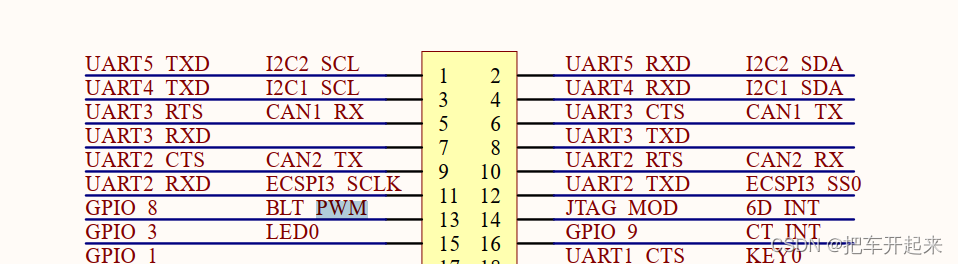
BLT PWM在I.MX6U 的 GPIO1_IO8 上,查看数据手册

GPIO1_IO8 可以复用为 PWM1_OUT。
使用到的部分寄存器如下

FWM(bit27:26): FIFO 水位线,用来设置 FIFO 空余位置为多少的时候表示 FIFO 为空。设置为 0 的时候表示 FIFO 空余位置大于等于 1 的时候 FIFO 为空;设置为 1 的时候表示 FIFO 空余位置大于等于 2 的时候 FIFO 为空;设置为 2 的时候表示 FIFO 空余位置大于等于 3 的时候FIFO 为空;设置为 3 的时候表示 FIFO 空余位置大于等于 4 的时候 FIFO 为空。
STOPEN(bit25): 此位用来设置停止模式下 PWM 是否工作,为 0 的话表示在停止模式下PWM 继续工作,为 1 的话表示停止模式下关闭 PWM。
DOZEN(bit24): 此位用来设置休眠模式下 PWM 是否工作,为 0 的话表示在休眠模式下PWM 继续工作,为 1 的话表示休眠模式下关闭 PWM。
WAITEN(bit23): 此位用来设置等待模式下 PWM 是否工作,为 0 的话表示在等待模式下PWM 继续工作,为 1 的话表示等待模式下关闭 PWM。
DEGEN(bit22): 此位用来设置调试模式下 PWM 是否工作,为 0 的话表示在调试模式下PWM 继续工作,为 1 的话表示调试模式下关闭 PWM。
BCTR(bit21): 字节交换控制位,用来控制 16 位的数据进入 FIFO 的字节顺序。为 0 的时候不进行字节交换,为 1 的时候进行字节交换。
HCRT(bit20): 半字交换控制位,用来决定从 32 位 IP 总线接口传输来的哪个半字数据写入采样寄存器的低 16 位中。
POUTC(bit19:18): PWM 输出控制控制位,用来设置 PWM 输出模式,为 0 的时候表示PWM 先输出高电平,当计数器值和采样值相等的话就输出低电平。为 1 的时候相反,当为 2 或者 3 的时候 PWM 信号不输出。本章我们设置为 0,也就是一开始输出高电平,当计数器值和采样值相等的话就改为低电平,这样采样值越大高电平时间就越长,占空比就越大。
CLKSRC(bit17:16): PWM 时钟源选择,为 0 的话关闭;为 1 的话选择 ipg_clk 为时钟源;为 2 的话选择 ipg_clk_highfreq 为时钟源;为 3 的话选择 ipg_clk_32k 为时钟源。本章我们设置为 1,也就是选择 ipg_clk 为 PWM 的时钟源,因此 PWM 时钟源频率为 66MHz。
PRESCALER(bit15:4): 分频值,可设置为 0~4095,对应着 1~4096 分频。
SWR(bit3): 软件复位,向此位写 1 就复位 PWM,此位是自清零的,当复位完成以后此位会自动清零。
REPEAT(bit2:1): 重复采样设置,此位用来设置 FIFO 中的每个数据能用几次。可设置 0~3,分别表示 FIFO 中的每个数据能用 1~4 次。本章我们设置为 0,即 FIFO 中的每个数据只能用一次。
EN(bit0): PWM 使能位,为 1 的时候使能 PWM,为 0 的时候关闭 PWM
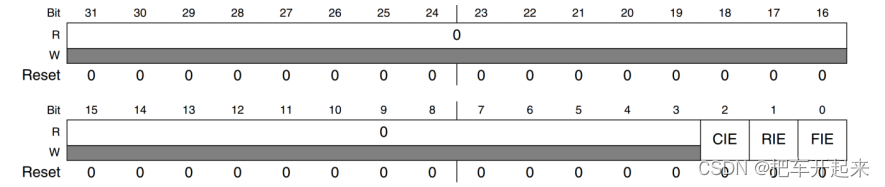
CIE(bit2):比较中断使能位,为 1 的时候使能比较中断,为 0 的时候关闭比较中断。
RIE(bit1):翻转中断使能位,当计数器值等于采样值并回滚到 0X0000 的时候就会产生此中断,为 1 的时候使能翻转中断,为 0 的时候关闭翻转中断。
FIE(bit0): FIFO 空中断,为 1 的时候使能,为 0 的时候关闭
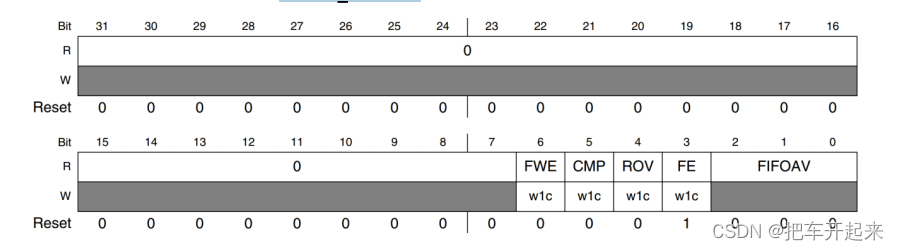
FWE(bit6): FIFO 写错误事件,为 1 的时候表示发生了 FIFO 写错误。
CMP(bit5): FIFO 比较事件发标志位,为 1 的时候表示发生 FIFO 比较事件。
ROV(bit4): 翻转事件标志位,为 1 的话表示翻转事件发生。
FE(bit3): FIFO 空标志位,为 1 的时候表示 FIFO 位空。
FIFOAV(bit2:1): 此位记录 FIFO 中的有效数据个数,有效值为 0~4,分别表示 FIFO 中有0~4 个有效数据。

寄存器 PWM1_PWMPR 只有低 16 位有效,当 PWM 计数器的值等于 PERIOD+1 的时候就会从 0X0000 重新开始计数,开启另一个周期。 PWM 的频率计算公式如下:
PWMO(Hz) = PCLK(Hz) / (PERIOD + 2)
其中 PCLK 是最终进入 PWM 的时钟频率,假如 PCLK 的频率为 1MHz,现在我们要产生一个频率为 1KHz 的 PWM 信号,那么就可以设置 PERIOD = 1000000 / 1000 – 2 = 998

此寄存器也是只有低 16 位有效,为采样值。通过这个采样值即可调整占空比,当计数器的值小于 SAMPLE 的时候输出高电平(或低电平)。当计数器值大于等于 SAMPLE,小于寄存器PWM1_PWMPR 的 PERIO 的时候输出低电平(或高电平)。同样在上面的例子中,假如我们要设
置 PWM 信号的占空比为 50%,那么就可以将 SAMPLE 设置为(PERIOD + 2) / 2 = 1000 / 2=500
创建bsp_backlight.c和bsp_backlight.h
#ifndef __BSP_BACKLIGHT_H
#define __BSP_BACKLIGHT_H
#include "imx6ul.h"
#include "bsp_int.h"
/* 背光PWM结构体 */
struct backlight_dev_struc
{
unsigned char pwm_duty; /* 占空比 */
};
/* 函数声明 */
void backlight_init(void);
void pwm1_enable(void);
void pwm1_setsample_value(unsigned int value);
void pwm1_setperiod_value(unsigned int value);
void pwm1_setduty(unsigned char duty);
void pwm1_irqhandler(void);
#endif
#include "bsp_backlight.h"
/* 背光设备 */
struct backlight_dev_struc backlight_dev;
/*
* @description : pwm1中断处理函数
* @param : 无
* @return : 无
*/
void pwm1_irqhandler(void)
{
if(PWM1->PWMSR & (1 << 3)) /* FIFO为空中断 */
{
/* 将占空比信息写入到FIFO中,其实就是设置占空比 */
pwm1_setduty(backlight_dev.pwm_duty);
PWM1->PWMSR |= (1 << 3); /* 写1清除中断标志位 */
}
}
/*
* @description : 初始化背光PWM
* @param : 无
* @return : 无
*/
void backlight_init(void)
{
unsigned char i = 0;
/* 1、背光PWM IO初始化 */
IOMUXC_SetPinMux(IOMUXC_GPIO1_IO08_PWM1_OUT, 0); /* 复用为PWM1_OUT */
/* 配置PWM IO属性
*bit 16:0 HYS关闭
*bit [15:14]: 10 100K上拉
*bit [13]: 1 pull功能
*bit [12]: 1 pull/keeper使能
*bit [11]: 0 关闭开路输出
*bit [7:6]: 10 速度100Mhz
*bit [5:3]: 010 驱动能力为R0/2
*bit [0]: 0 低转换率
*/
IOMUXC_SetPinConfig(IOMUXC_GPIO1_IO08_PWM1_OUT, 0XB090);
/* 2、初始化PWM1 */
/*
* 初始化寄存器PWMCR
* bit[27:26] : 01 当FIFO中空余位置大于等于2的时候FIFO空标志值位
* bit[25] :
0 停止模式下PWM不工作
* bit[24] : 0 休眠模式下PWM不工作
* bit[23] : 0 等待模式下PWM不工作
* bit[22] : 0 调试模式下PWM不工作
* bit[21] : 0 关闭字节交换
* bit[20] : 0 关闭半字数据交换
* bit[19:18] : 00 PWM输出引脚在计数器重新计数的时候输出高电平
* 在计数器计数值达到比较值以后输出低电平
* bit[17:16] : 01 PWM时钟源选择IPG CLK = 66MHz
* bit[15:4] : 65 分频系数为65+1=66,PWM时钟源 = 66MHZ/66=1MHz
* bit[3] : 0 PWM不复位
* bit[2:1] : 00 FIFO中的sample数据每个只能使用一次。
* bit[0] : 0 先关闭PWM,后面再使能
*/
PWM1->PWMCR = 0; /* 寄存器先清零 */
PWM1->PWMCR |= (1 << 26) | (1 << 16) | (65 << 4);
/* 设置PWM周期为1000,那么PWM频率就是1M/1000 = 1KHz。 */
pwm1_setperiod_value(1000);
/* 设置占空比,默认50%占空比 ,写四次是因为有4个FIFO */
backlight_dev.pwm_duty = 50;
for(i = 0; i < 4; i++)
{
pwm1_setduty(backlight_dev.pwm_duty);
}
/* 使能FIFO空中断,设置寄存器PWMIR寄存器的bit0为1 */
PWM1->PWMIR |= 1 << 0;
system_register_irqhandler(PWM1_IRQn, (system_irq_handler_t)pwm1_irqhandler, NULL); /* 注册中断服务函数 */
GIC_EnableIRQ(PWM1_IRQn); /* 使能GIC中对应的中断 */
PWM1->PWMSR = 0; /* PWM中断状态寄存器清零 */
pwm1_enable(); /* 使能PWM1 */
}
/*
* @description : 使能PWM
* @param : 无
* @return : 无
*/
void pwm1_enable(void)
{
PWM1->PWMCR |= 1 << 0;
}
/*
* @description : 设置Sample寄存器,Sample数据会写入到FIFO中,
* 所谓的Sample寄存器,就相当于比较寄存器,假如PWMCR中的POUTC
* 设置为00的时候。当PWM计数器中的计数值小于Sample的时候
* 就会输出高电平,当PWM计数器值大于Sample的时候输出底电平,
* 因此可以通过设置Sample寄存器来设置占空比
* @param - value : 寄存器值,范围0~0XFFFF
* @return : 无
*/
void pwm1_setsample_value(unsigned int value)
{
PWM1->PWMSAR = (value & 0XFFFF);
}
/*
* @description : 设置PWM周期,就是设置寄存器PWMPR,PWM周期公式如下
* PWM_FRE = PWM_CLK / (PERIOD + 2), 比如当前PWM_CLK=1MHz
* 要产生1KHz的PWM,那么PERIOD = 1000000/1K - 2 = 998
* @param - value : 周期值,范围0~0XFFFF
* @return : 无
*/
void pwm1_setperiod_value(unsigned int value)
{
unsigned int regvalue = 0;
if(value < 2)
regvalue = 2;
else
regvalue = value - 2;
PWM1->PWMPR = (regvalue & 0XFFFF);
}
/*
* @description : 设置PWM占空比
* @param - value : 占空比0~100,对应0%~100%
* @return : 无
*/
void pwm1_setduty(unsigned char duty)
{
unsigned short preiod;
unsigned short sample;
backlight_dev.pwm_duty = duty;
preiod = PWM1->PWMPR + 2;
sample = preiod * backlight_dev.pwm_duty / 100;
pwm1_setsample_value(sample);
}
3、main文件
#include "bsp_clk.h"
#include "bsp_delay.h"
#include "bsp_led.h"
#include "bsp_beep.h"
#include "bsp_key.h"
#include "bsp_int.h"
#include "bsp_uart.h"
#include "bsp_lcd.h"
#include "bsp_lcdapi.h"
#include "bsp_rtc.h"
#include "bsp_icm20608.h"
#include "bsp_spi.h"
#include "stdio.h"
#include "bsp_ft5426.h"
#include "bsp_gt9147.h"
#include "bsp_backlight.h"
/*
* @description : 使能I.MX6U的硬件NEON和FPU
* @param : 无
* @return : 无
*/
void imx6ul_hardfpu_enable(void)
{
uint32_t cpacr;
uint32_t fpexc;
/* 使能NEON和FPU */
cpacr = __get_CPACR();
cpacr = (cpacr & ~(CPACR_ASEDIS_Msk | CPACR_D32DIS_Msk))
| (3UL << CPACR_cp10_Pos) | (3UL << CPACR_cp11_Pos);
__set_CPACR(cpacr);
fpexc = __get_FPEXC();
fpexc |= 0x40000000UL;
__set_FPEXC(fpexc);
}
/*
* @description : main函数
* @param : 无
* @return : 无
*/
int main(void)
{
unsigned char i = 0,keyvalue=0,duty=0;
unsigned char state = OFF;
imx6ul_hardfpu_enable(); /* 使能I.MX6U的硬件浮点 */
int_init(); /* 初始化中断(一定要最先调用!) */
imx6u_clkinit(); /* 初始化系统时钟 */
delay_init(); /* 初始化延时 */
clk_enable(); /* 使能所有的时钟 */
led_init(); /* 初始化led */
beep_init(); /* 初始化beep */
uart_init(); /* 初始化串口,波特率115200 */
lcd_init(); /* 初始化LCD */
backlight_init();
tftlcd_dev.forecolor = LCD_RED;
lcd_show_string(50, 10, 400, 24, 24, (char*)"ALPHA-IMX6UL BACKLIGHT TEST"); /* 显示字符串 */
lcd_show_string(50, 40, 200, 16, 16, (char*)"MY@4384");
lcd_show_string(50, 60, 200, 16, 16, (char*)"2023/2/23");
/* 设置默认占空比 10% */
if(tftlcd_dev.id == ATKVGA)
duty=100; //VGA只能在满输出时才能亮屏
else
duty = 10;
lcd_shownum(50 + 72, 90, duty, 3, 16);
pwm1_setduty(duty);
while(1)
{
keyvalue = key_getvalue();
if(keyvalue == KEY0_VALUE)
{
duty += 10; /* 占空比加10% */
if(duty > 100) /* 如果占空比超过100%,重新从10%开始 */
duty = 10;
lcd_shownum(50 + 72, 90, duty, 3, 16);
pwm1_setduty(duty); /* 设置占空比 */
}
delayms(10);
i++;
if(i == 50)
{
i = 0;
state = !state;
led_switch(LED0,state);
}
}
return 0;
}
编译烧写到sd,插上开发板之后就可以通过按键进行调节显示屏背光
一、RIPV2协议简介 RIP(RoutingInformationProtocol)路由协议是一种相对古老,在小型以及同介质网络中得到了广泛应用的一种路由协议。RIP采用距离向量算法,是一种距离向量协议。RIP-1是有类别路由协议(ClassfulRoutingProtocol),它只支持以广播方式发布协议报文。RIP-1的协议报文无法携带掩码信息,它只能识别A、B、C类这样的自然网段的路由,因此RIP-1不支持非连续子网(DiscontiguousSubnet)。RIP-2是一种无类别路由协议(ClasslessRoutingProtocol),支持路由标记,在路由策略中可根据路由标记对
目录1.1访问Cisco路由器的方法1.1.1通过Console口访问路由器1.1.2通过Telnet访问路由器1.1.3终端访问服务器1.2终端访问服务器配置命令汇总1.1访问Cisco路由器的方法 路由器没有键盘和鼠标,要初始化路由器需要把计算机的串口和路由器的Console口进行连接。访问Cisco路由器的方法还有Telnet、WebBrowser和网络管理软件(如CiscoWorks)等,本节讨论前2种。1.1.1通过Console口访问路由器 计算机的串口和路由器的Console口是通过反转线(Rollover)进行连接的,反转线的一端接在路由器的Console口上,另一
文章目录一、用户二、用户分类1、普通用户2、超级用户3、系统用户三、用户相关文件1、/etc/passwd文件2、/etc/shadow文件四、用户管理命令1、useradd2、adduser3、passwd4、usermod5、userdel一、用户Linux系统是一个多用户多任务的分时操作系统,任何一个要使用系统资源的用户都必须先向系统管理员申请一个账号,然后以这个账号的身份进入系统。在Linux系统中,任何文件都属于某一特定用户,而任何用户都隶属于至少一个用户组。用户名(username):每个用户账号都拥有一个惟一的用户名和各自的口令。用户在登录时键入正确的用户名和口令后,就能够进入系
文章目录实验要求实验思路IP地址规划路由实验配置R1上配置R2上配置R3上配置R4上配置R5上配置R6上配置R7上配置R8上配置R9上配置R10上配置R11上配置R12上配置实验测试R10pingR4的环回R10pingR12的环回R10pingR1实验要求R4为ISP,其只能配置IP地址;R4与其他所有直连设备间均使用公有IP;R3-R5/6/7为MGRE环境,R3为中心站点;整个OSPF环境IP基于172.16.0.0/16划分;所有设备均可访问R4的环回;减少LSA的更新量,加快收敛,保障更新安全;全网可达实验思路IP地址规划公网IP随便配置,这里我R3-R4的网段为34.1.1.0/2
首先我们得有一个数据库,数据库里有表职工表: 部门表:接下来的操作都是针对以上的表其次我们来建立登录用户createlogin王明withpassword='123456'--创建登录用户,登录名为王明,密码为123456.创建登录名之后,登录用户还不能对数据库进行操作,还要对登录用户创建数据库用户createuserU1forlogin王明--创建数据库用户关联登录用户这时候登录王明的账户,数据库会自动映射到数据库用户U1,由U1来进行对数据库的操作。不过,只创建了用户,而用户还没有获得对数据库的操作权力,我们就要对数据库用户进行权力分配有时间的小伙伴可以额外花点时间点击链接了解详细1)设置
C#面向对象程序设计课程实验五:实验名称:C#面向对象技术实验内容:C#面向对象技术一、实验目的及要求二、实验环境三、实验内容与步骤3.1、实验内容:测试类,实现多态3.2、实验步骤3.2.1、实验程序3.2.2、实验运行结果3.3、实验内容:创建一个Vehicle类,并将它声明为抽象类3.4、实验步骤3.4.1、实验程序3.4.2、实验运行结果四、实验总结实验内容:C#面向对象技术一、实验目的及要求(1)掌握类的继承特性;(2)学会使用C#实现类的继承性;(3)理解类的多态特性;(4)学会使用C#的方法重写;二、实验环境MicrosoftVisualStudio2008三、实验内容与步骤3.
实验题目bomblab实验目的使用gdb工具反汇编出汇编代码,结合c语言文件找到每个关卡的入口函数。然后分析汇编代码,分析得到每一关的通关密码。进一步加深对linux指令的理解,对gdb调试的一些基本操作以及高级操作有所了解。熟悉汇编程序,懂得如何利用汇编程序写出C语言程序伪代码,熟悉并掌握函数调用过程中的栈帧结构的变化,熟悉汇编程序及其调试方法。实验环境个人PC、Linux32位操作系统、Ubuntu16.04实验内容准备阶段将实验压缩包解压并找到本人所用到的实验文件夹bomb7,复制到linux系统中,打开文件夹得到bomb、bomb.c、README文件;阅读README等实验相关材料,
文章目录实验二:HDFS+MapReduce数据处理与存储实验1.实验目的2.实验环境3.实验内容3.1HDFS部分3.1.1上传文件3.1.2下载文件3.1.3显示文件信息3.1.4显示目录信息3.1.5删除文件3.1.6移动文件3.2MapReduce部分3.2.0Mapreduce原理3.2.1合并和去重3.2.1.1编写Merge.java代码3.2.1.2编译执行3.2.2文件的排序3.2.2.1编写Sort.java代码3.2.2.2编译执行4.踩坑记录5.心得体会6.源码附录6.1Merge.java完整代码6.2Sort.java完整代码实验二:HDFS+MapReduce数据
是否存在适用于Ruby的(实验性)类浏览器?我说的是类似于大多数Smalltalk实现的类浏览器/编辑器组合(即专注于[运行时]类/对象而不是.rb文件)P.S.:看起来pry已经能够做很多smalltalk风格类浏览器需要的事情了?https://speakerdeck.com/u/rahult/p/pry-an-irb-alternative-on-steroidsP.S.2:看起来SeasideSmalltalk框架有一个webbrowserbasedclassbrowserP.S.3:MagLev/Webtools是我发现的最接近的:P.S.4:显然http://tibleiz
目录实验准备实验内容实验步骤1.规划网络拓扑2.划分IP地址块3.配置路由器及主机接口属性4.配置路由器的接口IP地址5.配置静态路由(a)按照类似的方式,配置标营校区路由器的静态路由如图所示。(b)按照类似的方式,配置中心校区路由器的静态路由如图所示。(c)按照类似的方式,配置双龙街校区路由器的静态路由如图所示。6.测试主机之间的连通性(a)首先,采用ping命令测试任意两台计算机之间的连通性,在位于岔路口校区子网的PC0上向位于双龙街校区子网的PC5发起ping测量,图16显示了测量结果,可见经过在各个路由器上配置静态路由,位于不同子网内的主机之间已经能够正常通信。(b)其次,通过浏览器测