4月18日,以「拥抱汽车行业新时代」为主题的2023上海车展正式拉开帷幕。以视觉3D理解为核心的下一代自动驾驶系统提供商鉴智机器人,携全新升级的智驾产品线首次亮相车展,重磅发布基于AI的双目立体视觉智驾方案。
凭借双目立体视觉系统的差异化优势,鉴智机器人全系智驾产品方案不依赖高精度地图和激光雷达,具有高性能、高性价比优势,能以更合理算力和更低成本传感器配置,满足汽车智能化下半场主机厂的多样化需求。

鉴智机器人亮相上海车展2.2H馆
鉴智机器人新一代智驾产品线由PhiGo智能驾驶解决方案(包括差异化PhiGo Bi-Series双目智能驾驶解决方案)、PhiVision智驾视觉感知产品、PhiMotion智能底盘感知解决方案和PhiCMS电子后视镜解决方案四大产品系列组成。目前,PhiGo智驾方案和PhiMotion智能底盘感知解决方案均已获得头部主机厂大规模量产定点,交付总量逾30万台。

鉴智机器人新一代智驾产品线
以双目立体视觉产品为整车智能化核心部件的系统方案正成为产业协同创新的基石。车展期间,鉴智机器人还宣布与立昇智能、孔辉科技等达成深度战略合作,将与合作伙伴紧密合作、多元协同,全面加速智驾产品方案的规模化复制。
在智能驾驶量产落地的关键节点,具有高性能上限和成本优势的视觉路线正在成为行业更优解。鉴智机器人自成立之初便以视觉3D理解为核心,坚持软硬协同优化和AI数据驱动,打造出不依赖高精度地图和激光雷达,具备高性能、高性价比和可成长迭代的智能驾驶解决方案。
上海车展期间,鉴智机器人重磅发布全新升级版智驾产品线PhiGo。根据传感器和算力配置的不同,PhiGo提供四款方案,满足车企多样化需求:PhiGo Air全速域智能辅助驾驶方案、PhiGo Pro高速领航辅助驾驶方案,以及搭载鉴智机器人自研惯导双目的PhiGo Bi-Series——PhiGo Bi-Pro高速领航辅助驾驶方案和PhiGo Bi-Max点到点全域双目智驾领航方案。
 鉴智机器人PhiGo智驾方案核心优势
鉴智机器人PhiGo智驾方案核心优势
PhiGo全系采用以视觉为主、兼容多传感器的灵活端到端优化方案,提供从传感器层、感知层、规控应用层的全栈产品,具备强视觉感知、轻地图特征

PhiGo Bi-Series双目智驾系列是鉴智机器人重磅推出的差异化视觉方案,以自研惯导双目为核心构建事无巨细的3D视觉感知能力,从辅助驾驶到高阶智驾均能提供“越级式”的系统能力,实现城市行车真正全天时、全天候、全类目的主动安全。针对复杂的城市领航辅助驾驶场景,提供近距离加塞处理、非标障碍物避让、大曲率弯道居中巡航、路面高程检测、道路拓扑结构构建、可行驶区域检测、高性能记忆行车和记忆泊车等特色功能。目前PhiGo Bi-Series提供7VnR和11VnR两款方案配置,即PhiGo Bi-Pro和PhiGo Bi-Max两个版本。

高性能智驾方案的背后是鉴智机器人领先的视觉3D感知能力和异构平台开发范式。基于全球领先的AI视觉算法技术,鉴智机器人推出PhiVision智驾视觉感知产品,为L2/L2+/L2++提供标准化视觉3D感知产品,深度赋能智能驾驶落地。
PhiVision可支持主动安全、舒适行车和整车智能化应用三大类功能,包括车道线检测、车辆检测、VRU检测、交通标志检测、交通灯检测、地面标识检测、一般障碍物检测、可行驶区域等核心感知功能。

鉴智机器人PhiVision可支持功能
PhiVision具有领先性、灵活性、学习性和开放性四大优势,为自动驾驶系统赋能底层关键能力:
基于双目立体视觉智驾系统提供的高精度、稠密3D感知和像素级路面三维信息重建,鉴智机器人同时推出全栈软硬一体的PhiMotion智能底盘感知解决方案。
PhiMotion可支撑客户快速研发包括魔毯悬架、驾驶模式自适应调节、动力系统智能分配、车辆可通过性检测等在内的极具差异性的智能底盘功能应用。目前,PhiMotion已获得国内顶级OEM的项目定点。
搭载鉴智机器人自研的数据闭环和3D感知方案,PhiMotion在不断提升时空层面视差精度的同时,可直接为客户提供路面感知结果数据,提供路面高程检测、路面类型识别、路面凸起物检测和路面坡度检测等多项功能。
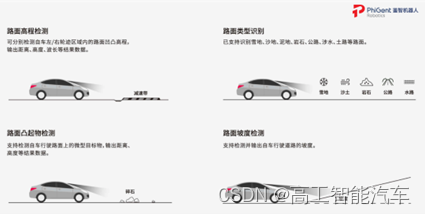
鉴智机器人PhiMotion智能底盘感知方案功能
GB15084-2022《机动车辆间接视野装置性能和安装要求》国家标准将于今年7月1日正式实施。新国标执行以后,电子后视镜不但可以安装,而且允许取代传统后视镜,将进一步推进汽车智能化升级。

鉴智机器人PhiCMS电子后视镜解决方案
鉴智机器人PhiCMS电子后视镜解决方案基于自研的ISP IP和AI能力,提供满足GB15084标准的全栈IP解决方案,包括传感器接口、图像信号处理(ISP)模块、显示模块、BSD盲区预警功能以及随动显示功能,为驾驶员提供增强的图像质量、广阔的视野范围以及更安全的驾驶体验。
PhiCMS具备高性能、高能效比特性,保证在雨雪天气、炫光、暗光等环境下的行车视野清晰。基于鉴智机器人全栈专有ISP IP,可提供开放灵活的定制化ISP方案;同时,鉴智机器人在FPGA上具有丰富的AI算法部署能力和自动驾驶量产经验,可提供更加智能化的安全保障。
截至目前,鉴智机器人已成功定点10余个车型,其中5个车型已量产交付,交付总量逾30万台;双目立体视觉产品和L2++智驾方案已获得顶级OEM定点,并在业界首家推出基于地平线征程5的L2++智能驾驶量产方案。
未来,鉴智机器人将以“AI驱动世界,拓展人类边界”为使命,持续为市场提供高性能、高性价比的差异化智能驾驶产品。
相信很多人在录制视频的时候都会遇到各种各样的问题,比如录制的视频没有声音。屏幕录制为什么没声音?今天小编就和大家分享一下如何录制音画同步视频的具体操作方法。如果你有录制的视频没有声音,你可以试试这个方法。 一、检查是否打开电脑系统声音相信很多小伙伴在录制视频后会发现录制的视频没有声音,屏幕录制为什么没声音?如果当时没有打开音频录制,则录制好的视频是没有声音的。因此,建议在录制前进行检查。屏幕上没有声音,很可能是因为你的电脑系统的声音被禁止了。您只需打开电脑系统的声音,即可录制音频和图画同步视频。操作方法:步骤1:点击电脑屏幕右下侧的“小喇叭”图案,在上方的选项中,选择“声音”。 步骤2:在“声
首先回顾一下拉格朗日定理的内容:函数f(x)是在闭区间[a,b]上连续、开区间(a,b)上可导的函数,那么至少存在一个,使得:通过这个表达式我们可以知道,f(x)是函数的主体,a和b可以看作是主体函数f(x)中所取的两个值。那么可以有, 也就意味着我们可以用来替换 这种替换可以用在求某些多项式差的极限中。方法: 外层函数f(x)是一致的,并且h(x)和g(x)是等价无穷小。此时,利用拉格朗日定理,将原式替换为 ,再进行求解,往往会省去复合函数求极限的很多麻烦。使用要注意:1.要先找到主体函数f(x),即外层函数必须相同。2.f(x)找到后,复合部分是等价无穷小。3.要满足作差的形式。如果是加
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
原始问题Letd(n)bedefinedasthesumofproperdivisorsofn(numberslessthannwhichdivideevenlyinton).Ifd(a)=bandd(b)=a,whereab,thenaandbareanamicablepairandeachofaandbarecalledamicablenumbers.Forexample,theproperdivisorsof220are1,2,4,5,10,11,20,22,44,55and110;therefored(220)=284.Theproperdivisorsof284are1,2,
这个问题在这里已经有了答案:WhydoRubysettersneed"self."qualificationwithintheclass?(3个答案)关闭29天前。给定这段代码:classSomethingattr_accessor:my_variabledefinitialize@my_variable=0enddeffoomy_variable=my_variable+3endends=Something.news.foo我收到这个错误:test.rb:9:in`foo':undefinedmethod`+'fornil:NilClass(NoMethodError)fromtes
电脑启动出现显示器黑屏是一个相当常见的问题。如果您遇到了这个问题,不要惊慌,因为它有很多可能的原因,可以采取一些简单的措施来解决它。在本文中,小编将介绍下面4种常见的电脑启动后显示器黑屏的原因,排查这些原因,快速解决! 演示机型:联想Ideapad700-15ISK-ISE系统版本:Windows10一、显示器问题如果出现电脑启动后显示器黑屏的情况。那么首先您需要检查一下显示器是否正常工作。您可以通过更换另一个显示器或将当前显示器连接到另一台计算机来检查显示器是否存在问题。如果问题仍然存在,那么您可以排除显示器故障的可能性。 二、显卡问题如果您的电脑配备了独立显卡,那么显卡故障也可能是导致电脑
目录一.大致如下常见问题:(1)找不到程序所依赖的Qt库version`Qt_5'notfound(requiredby(2)CouldnotLoadtheQtplatformplugin"xcb"in""eventhoughitwasfound(3)打包到在不同的linux系统下,或者打包到高版本的相同系统下,运行程序时,直接提示段错误即segmentationfault,或者Illegalinstruction(coredumped)非法指令(4)ldd应用程序或者库,查看运行所依赖的库时,直接报段错误二.问题逐个分析,得出解决方法:(1)找不到程序所依赖的Qt库version`Qt_5'
RuntimeError:CUDAerror:device-sideasserttriggered问题描述解决思路发现问题:总结问题描述当我在调试模型的时候,出现了如下的问题/opt/conda/conda-bld/pytorch_1656352465323/work/aten/src/ATen/native/cuda/IndexKernel.cu:91:operator():block:[5,0,0],thread:[63,0,0]Assertion`index>=-sizes[i]&&index通过提示信息可以知道是个数组越界的问题。但是如图一中第二行话所说这个问题可能并不出在提示的代码段
我遇到了未定义方法`to_key'的问题这是我的books_controller.rbclassBooksController和我的索引页如下。index.html.erb......现在当我要访问索引页面时出现如下错误。undefinedmethod`to_key'for# 最佳答案 index通常返回一个集合。事实上,您的Controller符合要求。但是,您的View试图为其定义一个表单。正如您所发现的,这不会成功。表单适用于实体,而不适用于集合。该错误在您看来以及您希望如何处理index。
我在目录“/home/enterprise/pkg”中有一个本地gem(enterprise-0.0.1.gem)。它依赖于active_directorygem(v1.5.5),这是在它的enterprise.gemspec文件中指定的,如下所示:-gem.add_dependency("active_directory")在我的应用程序的Gemfile中,我添加了以下行:-gem'enterprise','0.0.1',path=>'/home/enterprise/pkg'当我做的时候bundleinstall在我的应用程序的源目录中,只安装了企业gem。因此,我遇到了引用act