串口知识之RS485 日常生活中用的也是比较少的(相对于RS232)232 比较早,市场上比较多的设备接口基本上都是RS485,RS232,下面着重说一下RS485。
串口RS485?
485(一般称作RS485/EIA-485)是隶属于OSI模型物理层的电气特性规定为2线,半双工,多点通信的标准。它的电气特性和RS-232大不一样。用缆线两端的电压差值来表示传递信号。RS485仅仅规定了接受端和发送端的电气特性。它没有规定或推荐任何数据协议。
串口RS485原理
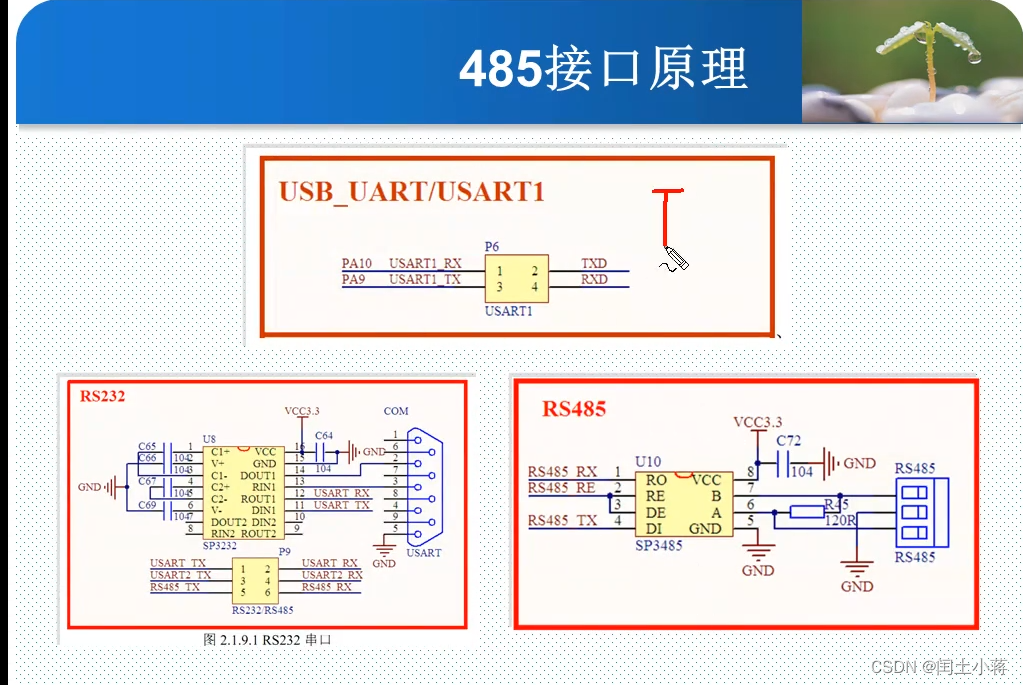
因为单片机通信一般是TTL电平,而我们的外接设备如果是485设备,通信的电平就是485电平,这两者的电平是不一样的,所以两者不能直接相接一起。中间需要一个电平转换的芯片来协商一下,所以就有了我们的485芯片。因为485通信是半双工的,就是发送数据的时候不能同时接收数据,所以我们又把485芯片叫做半双工收发器。而SP3485芯片就是一款非常经典的低功耗半双工收发器,满足RS-485串行协议要求。
RS485的特点
1、接口电平低,不易损坏芯片。RS485的电气特性:逻辑“1”以两线间的电压差为+(2~6)V表示;
逻辑“0”以两线间的电压差为-(2~6)V表示。接口信号电平比RS232降低了,不易损坏接口电路的芯片。
2、’传输速率高。10米时,RS485的数据最高传输速率可达35Mbps,在1200m时,传输速度可达100Kbps。
3、抗干扰能力强。RS485接口是采用平衡驱动器和差分接收器的组合,抗共模干 扰能力增强,即抗噪声干扰性好。
4、传输距离远,支持节点多。RS485总线最长可以传输1200m以上(速率≤100Kbps)一般最大支持32个节点,如果使用特制的485芯片,可以达到128个或者256个节点,最大的可以支持到400个节点
原理图与接线说明
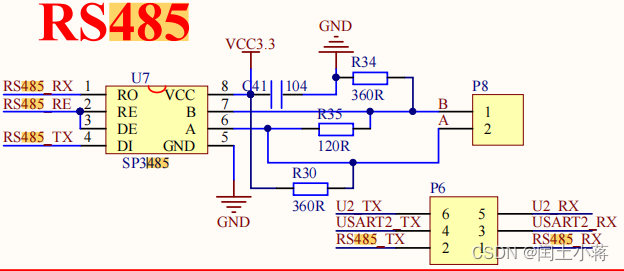
A端RS485_RX 链接 USART2_RX 连接 PA3
B端RS485_TX 链接 USART2_TX 连接 PA2
RS485_RE 链接的PD7 ,控制发送/接受(485模式控制.0,接收;1,发送.)
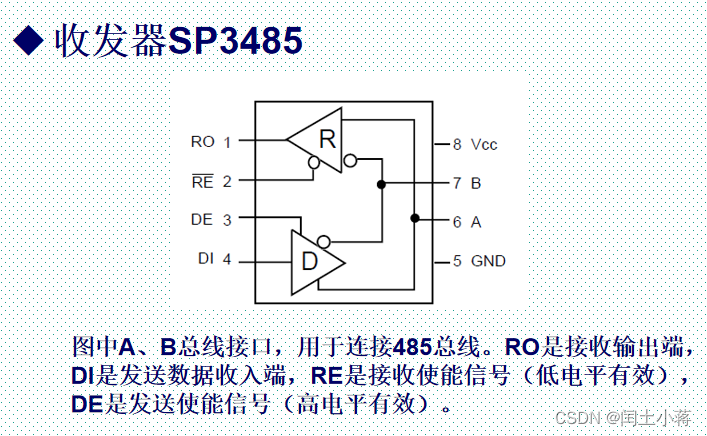
SP3485接收器的输入是差分输入,接收器的输入电阻通常为15K。如果RE为低,接收器使能,反之接收器禁止。
因此,我们一般将ED和RE接在一起,单片机MCU向外发送数据时,将USART_EN置位1,单片机MCU接收外界送数据时,将USART_EN置位0,即可。
接线引脚如下图所示


原理图
下面是关于RS485 收发读的代码说明 (代码来源于网络 仅供学习参考)
实验目的:RS485是差分信号,收发数据时,A、B都在工作。开发板也只提供了一个RS485接口,因此不能自发自收实验,需要至少两个RS485设备进行实验。这里假设两个开发板进行RS485通信,一个做主机,一个做从机,主机发送数据给从机,从机收到数据再发给主机,实现两个设备的收发数据,供读者参考和方便移植。
初始化USART1、2:设置波特率,收发选择,有效数据位等;
将所使用的串口引脚初始化:USART使能、GPIO端口时钟使能、GPIO引脚设置为USART复用;
RS485采用中断方式发送,编写中断回调函数;
主函数编写控制逻辑:按下按键KEY1(KEY_U),主机RS485发送一次数据,从机RS485接收到数据并打印,然后从机RS485发送数据,主机RS485接受到数据并打印;
在软件方面,RS485的本质跟串口没有差别,不同的地方在于:RS485在发送、接收之前,需要设置收发控制引脚。
rs485.h
#ifndef _rs485_H
#define _rs485_H
#include "system.h"
extern u8 RS485_RX_BUF[64]; //接收缓冲,最大64个字节
extern u8 RS485_RX_CNT; //接收到的数据长度
//模式控制
#define RS485_TX_EN PDout(7) //485模式控制.0,接收;1,发送.
void RS485_Init(u32 bound); //初始化函数(485初始化用的是串口2所以用usart2的端口)
void RS485_Send_Data(u8 *buf,u8 len); //发送
void RS485_Receive_Data(u8 *buf,u8 *len);//接受
#endif
rs485.c
#include "rs485.h"
#include "SysTick.h"
//接收缓存区
u8 RS485_RX_BUF[64]; //接收缓冲,最大64个字节.
//接收到的数据长度
u8 RS485_RX_CNT=0;
void USART2_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) //接收到数据
{
res =USART_ReceiveData(USART2); //读取接收到的数据
if(RS485_RX_CNT<64)
{
RS485_RX_BUF[RS485_RX_CNT]=res; //记录接收到的值
RS485_RX_CNT++; //接收数据增加1
}
}
}
//初始化IO 串口2
//pclk1:PCLK1时钟频率(Mhz)
//bound:波特率
void RS485_Init(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOD, ENABLE);//使能GPIOA,D时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//使能USART2时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //PD7端口配置 控制发送和接受
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA3
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
RCC_APB1PeriphResetCmd(RCC_APB1Periph_USART2,ENABLE);//复位串口2
RCC_APB1PeriphResetCmd(RCC_APB1Periph_USART2,DISABLE);//停止复位
USART_InitStructure.USART_BaudRate = bound;//波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//8位数据长度
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;///奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式
USART_Init(USART2, &USART_InitStructure); ; //初始化串口
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn; //使能串口2中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3; //先占优先级2级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级2级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启中断
USART_Cmd(USART2, ENABLE); //使能串口
RS485_TX_EN=0; //默认为接收模式
}
//RS485发送len个字节.
//buf:发送区首地址
//len:发送的字节数(为了和本代码的接收匹配,这里建议不要超过64个字节)
void RS485_Send_Data(u8 *buf,u8 len)
{
u8 t;
RS485_TX_EN=1; //设置为发送模式
for(t=0;t<len;t++) //循环发送数据
{
while(USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);
USART_SendData(USART2,buf[t]);
}
while(USART_GetFlagStatus(USART2, USART_FLAG_TC) == RESET);
RS485_RX_CNT=0;
RS485_TX_EN=0; //设置为接收模式
}
//RS485查询接收到的数据
//buf:接收缓存首地址
//len:读到的数据长度
void RS485_Receive_Data(u8 *buf,u8 *len)
{
u8 rxlen=RS485_RX_CNT;
u8 i=0;
*len=0; //默认为0
delay_ms(10); //等待10ms,连续超过10ms没有接收到一个数据,则认为接收结束
if(rxlen==RS485_RX_CNT&&rxlen)//接收到了数据,且接收完成了
{
for(i=0;i<rxlen;i++)
{
buf[i]=RS485_RX_BUF[i];
}
*len=RS485_RX_CNT; //记录本次数据长度
RS485_RX_CNT=0; //清零
}
}
+
main 函数
int main()
{
u8 i=0;
u8 rs485buf[5];
u8 len=0;
u8 key=0;
SysTick_Init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组 分2组
LED_Init();
USART1_Init(115200);
KEY_Init();
RS485_Init(9600);
while(1)
{
key=KEY_Scan(0);
if(key==KEY_UP_PRESS)
{
RS485_Send_Data(rs485buf,5);
}
RS485_Receive_Data(rs485buf,&len);
}
同理和串口协议是一样的,
总结
RS485 串口接口和接线
波特率 9600
RS485 接受数据必须通过485 发过来的
对于具有离线功能的智能手机应用程序,我正在为Xml文件创建单向文本同步。我希望我的服务器将增量/差异(例如GNU差异补丁)发送到目标设备。这是计划:Time=0Server:hasversion_1ofXmlfile(~800kiB)Client:hasversion_1ofXmlfile(~800kiB)Time=1Server:hasversion_1andversion_2ofXmlfile(each~800kiB)computesdeltaoftheseversions(=patch)(~10kiB)sendspatchtoClient(~10kiBtransferred)Cl
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
我尝试运行2.x应用程序。我使用rvm并为此应用程序设置其他版本的ruby:$rvmuseree-1.8.7-head我尝试运行服务器,然后出现很多错误:$script/serverNOTE:Gem.source_indexisdeprecated,useSpecification.Itwillberemovedonorafter2011-11-01.Gem.source_indexcalledfrom/Users/serg/rails_projects_terminal/work_proj/spohelp/config/../vendor/rails/railties/lib/r
刚入门rails,开始慢慢理解。有人可以解释或给我一些关于在application_controller中编码的好处或时间和原因的想法吗?有哪些用例。您如何为Rails应用程序使用应用程序Controller?我不想在那里放太多代码,因为据我了解,每个请求都会调用此Controller。这是真的? 最佳答案 ApplicationController实际上是您应用程序中的每个其他Controller都将从中继承的类(尽管这不是强制性的)。我同意不要用太多代码弄乱它并保持干净整洁的态度,尽管在某些情况下ApplicationContr
我是一个Rails初学者,但我想从我的RailsView(html.haml文件)中查看Ruby变量的内容。我试图在ruby中打印出变量(认为它会在终端中出现),但没有得到任何结果。有什么建议吗?我知道Rails调试器,但更喜欢使用inspect来打印我的变量。 最佳答案 您可以在View中使用puts方法将信息输出到服务器控制台。您应该能够在View中的任何位置使用Haml执行以下操作:-puts@my_variable.inspect 关于ruby-on-rails-如何在我的R
是否可以在应用程序中包含的gem代码中知道应用程序的Rails文件系统根目录?这是gem来源的示例:moduleMyGemdefself.included(base)putsRails.root#returnnilendendActionController::Base.send:include,MyGem谢谢,抱歉我的英语不好 最佳答案 我发现解决类似问题的解决方案是使用railtie初始化程序包含我的模块。所以,在你的/lib/mygem/railtie.rbmoduleMyGemclassRailtie使用此代码,您的模块将在
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
导读:随着叮咚买菜业务的发展,不同的业务场景对数据分析提出了不同的需求,他们希望引入一款实时OLAP数据库,构建一个灵活的多维实时查询和分析的平台,统一数据的接入和查询方案,解决各业务线对数据高效实时查询和精细化运营的需求。经过调研选型,最终引入ApacheDoris作为最终的OLAP分析引擎,Doris作为核心的OLAP引擎支持复杂地分析操作、提供多维的数据视图,在叮咚买菜数十个业务场景中广泛应用。作者|叮咚买菜资深数据工程师韩青叮咚买菜创立于2017年5月,是一家专注美好食物的创业公司。叮咚买菜专注吃的事业,为满足更多人“想吃什么”而努力,通过美好食材的供应、美好滋味的开发以及美食品牌的孵
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
我们目前正在为ROR3.2开发自定义cms引擎。在这个过程中,我们希望成为我们的rails应用程序中的一等公民的几个类类型起源,这意味着它们应该驻留在应用程序的app文件夹下,它是插件。目前我们有以下类型:数据源数据类型查看我在app文件夹下创建了多个目录来保存这些:应用/数据源应用/数据类型应用/View更多类型将随之而来,我有点担心应用程序文件夹被这么多目录污染。因此,我想将它们移动到一个子目录/模块中,该子目录/模块包含cms定义的所有类型。所有类都应位于MyCms命名空间内,目录布局应如下所示:应用程序/my_cms/data_source应用程序/my_cms/data_ty