本文主要介绍NAND flash和NOR flash储存原理和从多个方面对比两种闪存的差异点。NOR闪存是由Intel公司开发的,是一种随机访问设备,具有专用的地址和数据线(和SRAM类似),以字节的方式进行读写,允许对存储器当中的任何位置进行访问。而NAND闪存则没有专用的地址线,不能直接寻址,是通过一个间接的、类似I/O的接口来发送命令和地址来进行控制的,这就意味着NAND闪存只能够以页的方式进行访问。NOR 主要应用于代码存储介质中,而 NAND 则用于数据存储。
NOR flash:
NAND flash:
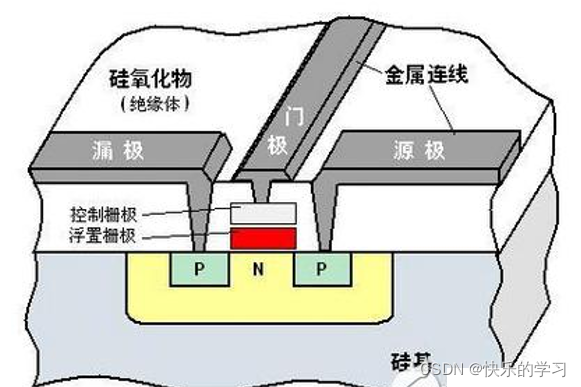
两种闪存都是用三端器件作为存储单元,分别为源极、漏极和栅极,与场效应管的工作原理相同,主要是利用电场的效应来控制源极与漏极之间的通断,栅极的电流消耗极小,不同的是场效应管为单栅极结构,而FLASH为双栅极结构,在栅极与硅衬底之间增加了一个浮置栅极。
浮置栅极是由氮化物夹在两层二氧化硅材料之间构成的,中间的氮化物就是可以存储电荷的电荷势阱。上下两层氧化物绝缘层的厚度大于50埃,以避免发生击穿。
3.1 浮栅的充放电
向数据单元内写入数据的过程就是向电荷势阱注入电荷的过程,写入数据有两种技术,热电子注入(hot electron injection)和F-N隧道效应(Fowler Nordheim tunneling),NAND型闪存的擦和写均是基于隧道效应,电流穿过浮置栅极与硅基层之间的氧化物绝缘层,对浮置栅极进行充电(写数据)或放电(擦除数据)。而NOR型闪存擦除数据仍是基于隧道效应(电流从浮置栅极到硅基层),但在写入数据时则是采用热电子注入方式(电流从浮置栅极到源极)。
在写入新数据之前,必须先将原来的数据擦除,这点跟硬盘不同,也就是将浮栅的电荷放掉,两种FLASH都是通过F-N隧道效应放电。
3.2 浮置栅极状态:0和1
这方面两种FLASH一样,向浮栅中注入电荷表示写入了’0’,没有注入电荷表示’1’,所以对 FLASH 清除数据是写 1 的,这与硬盘正好相反;
对于浮栅中有电荷的单元来说,由于浮栅的感应作用,在源极和漏极之间将形成带正电的空间电荷区,这时无论控制极上有没有施加偏置电压,晶体管都将处于导通状态。而对于浮栅中没有电荷的晶体管来说只有当控制极上施加有适当的偏置电压,在硅基层上感应出电荷,源极和漏极才能导通,也就是说在没有给控制极施加偏置电压时,晶体管是截止的。 如果晶体管的源极接地而漏极接位线,在无偏置电压的情况下,检测晶体管的导通状态就可以获得存储单元中的数据,如果位线上的电平为低,说明晶体管处于导通状态,读取的数据为0,如果位线上为高电平,则说明晶体管处于截止状态,读取的数据为1。由于控制栅极在读取数据的过程中施加的电压较小或根本不施加电压,不足以改变浮置栅极中原有的电荷量,所以读取操作不会改变 FLASH 中原有的数据。
3.3 连接和编址方式
两种FLASH具有相同的存储单元,工作原理也一样,为了缩短存取时间并不是对每个单元进行单独的存取操作,而是对一定数量的存取单元进行集体操作,NAND型FLASH各存储单元之间是串联的,而NOR型FLASH各单元之间是并联的;为了对全部的存储单元有效管理,必须对存储单元进行统一编址。
NAND的全部存储单元分为若干个块,每个块又分为若干个页,每个页是512byte,就是512个8位数,就是说每个页有512条位线,每条位线下 有8个存储单元;那么每页存储的数据正好跟硬盘的一个扇区存储的数据相同,这是设计时为了方便与磁盘进行数据交换而特意安排的,那么块就类似硬盘的簇;容量不同,块的数量不同,组成块的页的数量也不同。 在读取数据时,当字线和位线锁定某个晶体管时,该晶体管的控制极不加偏置电压,其它的7 个都加上偏置电压 而导通,如果这个晶体管的浮栅中有电荷就会导通使位线为低电平,读出的数就是 0,反之就是 1。
NOR 的每个存储单元以并联的方式连接到位线,方便对每一位进行随机存取;具有专用的 地址线,可以实现一次性的直接寻址;缩短了 FLASH 对处理器指令的执行时间。
4.1 操作速度
在写数据和擦除大量数据时,由于NAND flash 支持整块操作,因此NAND比NOR快得多,两者相差近千倍;而且NOR flash则要求在进行擦除前先要将目标块内所有的位都写为1,但是数据量小的时候,比如几个字节,Nor Flash比NAND flash 擦写速度快,因为对NAND flash的读写操作,虽然只是几个字节的操作,也需要重写整个数据块;
由于NOR地址线和数据线分开,所以NOR芯片可以像SRAM一样连在数据线上。读取数据时,NOR比NAND快,NOR以字或字节为单位进行读取,NAND要先向芯片发送地址信息进行寻址,才能开始读数据。
4.2 容量和成本对比
在面积和工艺相同的情况下,NAND FLASH容量比NOR要大得多,生产成本低,也更容易生产大容量的芯片,因此加个相对比较便宜;
NOR FLASH每个存储单元与位线相连,增加了芯片内位线的数量,不利于存储密度的提高。
4.3 易用性
NAND FLASH的I/O端口采用复用的数据线和地址线,必须先通过寄存器串行地进行数据存取,各个产品或厂商对信号的定义不同,增加了应用的难度。NAND Flash器件使用复杂的I/O口来串行地存取数据,8个引脚用来传送控制、地址和数据信息,操作时序比较复杂,一般CPU最好集成NAND控制器;
NOR FLASH有专门的地址引脚来寻址,较容易与其他芯片进行连接,另外还支持本地执行,应用程序可以直接在FLASH内部运行,可以简化产品设计。
4.4 耐久性
一般NAND擦写次数100万次,NOR擦写10万次。但是NOR的可靠性要高于NAND,这主要是因为NOR型的接口简单,数据操作少,位交换操作少,因此可靠性高,极少出现坏区块,因而一般用在对可靠性要求高的地方。相反的,NAND型接口和操作均相对复杂,位交换操作也很多,关键性数据更是需安错误探测/错误更正〔EDC/ECC)算法来确保数据的完整性,因此出现问题的几率要大得多,坏区块也是不可避免的,而且由于坏区块是随机分布的,连纠错也无法做到。
4.5 升级对比
NOR Flash的升级较为麻烦,因为不同容量的NOR Flash的地址线需求不一样,所以在更换不同容量的NOR Flash芯片时不方便。通常我们会通过在电路板的地址线上做一些跳接电阻来解决这样的问题,针对不同容量的NOR Flash。
而不同容量的Nand Flash的接口是固定的,所以升级简单。
4.6 文件系统比较
Linux系统中采用MTD来管理不同类型的Flash芯片,包括Nand Flash和NOR Flash。支持在Flash上运行的常用文件系统有cramfs、jffs、jffs2、yaffs、yaffs2等。cramfs文件系统是只读文件系统。
如果想在Flash上实现读写操作,通常在NorFlash上我们会选取jffs及jffs2文件系统,在NAND Flash上选用yaffs或yaffs2文件系统。Yaffs2文件系统支持大页(大于512字节/页)的NAND Flash存储器。
4.7 可靠性
保存数据的可靠性是任何存储设备的重要性能指标。闪存会遭遇称为位翻转的现象,其中一些位可以被反转。这种现象在NAND闪存中比在NOR闪存中更常见。出于产量考虑,NAND闪存随附着散布的坏块,随着擦除和编程周期在NAND闪存的整个生命周期中持续,更多的存储器单元变坏。因此,坏块处理是NAND闪存的强制性功能。另一方面,NOR闪存带有零坏块,在存储器的使用寿命期间具有非常低的坏块累积。因此,当涉及存储数据的可靠性时,NOR Flash具有优于NAND Flash的优势。
可靠性的另一个方面是数据保留,这方面,NOR Flash再次占据优势,例如,NOR Flash闪存S70GL02GT提供20年的数据保留,最高可达1K编程/擦除周期,NAND闪存S34ML04G2提供10年的典型数据保留。
4.8 能耗
NOR闪存在初始上电期间通常需要比NAND闪存更多的电流。但是,NOR Flash的待机电流远低于NAND Flash。两个闪存的瞬时有功功率相当。因此,有效功率由存储器活动的持续时间决定。NOR Flash在随机读取方面具有优势,而NAND Flash在擦除,写入和顺序读取操作中消耗的功率相对较低。
4.9 位交换
所有flash器件都受位交换现象的困扰。在某些情况下(NAND发生的次数要比NOR多),一个比特位会发生反转或被报告反转了。一位的变化可能不很明显,但是如果发生在一个关键文件上,这个小小的故障可能导致系统停机。如果只是报告有问题,多读几次就可能解决了。当然,如果这个位真的改变了,就必须采用错误探测/错误更正(EDC/ECC)算法。位反转的问题更多见于NAND闪存,NAND的供应商建议使用NAND闪存的时候,同时使用EDC/ECC算法,这个问题对于用NAND存储多媒体信息时倒不是致命的。当然,如果用本地存储设备来存储操作系统、配置文件或其他敏感信息时,必须使用EDC/ECC系统以确保可靠性。
在使用NAND器件时,必须先写入驱动程序,才能继续执行其他操作。向NAND器件写入信息需要相当的技巧,因为设计师绝不能向坏块写入,这就意味着在NAND器件上自始至终都必须进行虚拟映射。
4.10 软件支持
当讨论软件支持的时候,应该区别基本的读/写/擦操作和高一级的用于磁盘仿真和闪存管理算法的软件,包括性能优化。
在NOR器件上运行代码不需要任何的软件支持,在NAND器件上进行同样操作时,通常需要驱动程序,也就是内存技术驱动程序(MTD),NAND和NOR器件在进行写入和擦除操作时都需要MTD。
使用NOR器件时所需要的MTD要相对少一些,许多厂商都提供用于NOR器件的更高级软件,这其中包括M-System的TrueFFS驱动,该驱动被Wind River System、Microsoft、QNX Software System、Symbian和Intel等厂商所采用。
驱动还用于对DiskOnChip产品进行仿真和NAND闪存的管理,包括纠错、坏块处理和损耗平衡。
4.11 NOR Flash和NAND Flash共性
NAND和NOR芯片的共性首先表现在向芯片中写数据必须先将芯片中对应的内容清空,然后再写入,也就是通常说的“先擦后写”。只不过NOR芯片只用擦写一个字,而NAND需要擦写整个块。其次,闪存擦写的次数都是有限的.当闪存的使用接近使用寿命的时候,经常会出现写操作失败;到达使用寿命时,闪存内部存放的数据虽然可以读,但是不能再进行写操作了所以为了防止上面问题的发生,不能对某个特定的区域反复进行写操作。通常NAND的可擦写次数高于NOR芯片,但是由于NAND通常是整块擦写,块内的页面中如果有一位失效整个块就会失效,而且由于擦写过程复杂,失败的概率相对较高,所以从整体上来说NOR的寿命较长。
另一个共性是闪存的读写操作不仅仅是一个物理操作,实际上在闪存上存放数据必须使用算法实现,这个模块一般在驱动程序的MTD’ (Memory Technology Drivers)模块中或者在FTLZ (Flash Translation Layer)层内实现,具体算法和芯片的生产厂商以及芯片型号有关系。
我正在使用的第三方API的文档状态:"[O]urAPIonlyacceptspaddedBase64encodedstrings."什么是“填充的Base64编码字符串”以及如何在Ruby中生成它们。下面的代码是我第一次尝试创建转换为Base64的JSON格式数据。xa=Base64.encode64(a.to_json) 最佳答案 他们说的padding其实就是Base64本身的一部分。它是末尾的“=”和“==”。Base64将3个字节的数据包编码为4个编码字符。所以如果你的输入数据有长度n和n%3=1=>"=="末尾用于填充n%
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
SPI接收数据左移一位问题目录SPI接收数据左移一位问题一、问题描述二、问题分析三、探究原理四、经验总结最近在工作在学习调试SPI的过程中遇到一个问题——接收数据整体向左移了一位(1bit)。SPI数据收发是数据交换,因此接收数据时从第二个字节开始才是有效数据,也就是数据整体向右移一个字节(1byte)。请教前辈之后也没有得到解决,通过在网上查阅前人经验终于解决问题,所以写一个避坑经验总结。实际背景:MCU与一款芯片使用spi通信,MCU作为主机,芯片作为从机。这款芯片采用的是它规定的六线SPI,多了两根线:RDY和INT,这样从机就可以主动请求主机给主机发送数据了。一、问题描述根据从机芯片手
在VMware16.2.4安装Ubuntu一、安装VMware1.打开VMwareWorkstationPro官网,点击即可进入。2.进入后向下滑动找到Workstation16ProforWindows,点击立即下载。3.下载完成,文件大小615MB,如下图:4.鼠标右击,以管理员身份运行。5.点击下一步6.勾选条款,点击下一步7.先勾选,再点击下一步8.去掉勾选,点击下一步9.点击下一步10.点击安装11.点击许可证12.在百度上搜索VM16许可证,复制填入,然后点击输入即可,亲测有效。13.点击完成14.重启系统,点击是15.双击VMwareWorkstationPro图标,进入虚拟机主
如果我在模型中设置验证消息validates:name,:presence=>{:message=>'Thenamecantbeblank.'}我如何让该消息显示在闪光警报中,这是我迄今为止尝试过的方法defcreate@message=Message.new(params[:message])if@message.valid?ContactMailer.send_mail(@message).deliverredirect_to(root_path,:notice=>"Thanksforyourmessage,Iwillbeintouchsoon")elseflash[:error]
作为新的阿里云用户,您可以50免费试用多种优惠,价值高达1,700美元(或8,500美元)。这将让您了解和体验阿里云平台上提供的一系列产品和服务。如果您以个人身份注册免费试用,您将获得价值1,700美元的优惠。但是,如果您是注册公司,您可以选择企业免费试用,提交基本信息通过企业实名注册验证,即可开始价值$8,500的免费试用!本教程介绍了如何设置您的帐户并使用您的免费试用版。关于免费试用在我们开始此试用之前,您还必须遵守以下条款和条件才能访问您的免费试用:只有在一年内创建的账户才有资格获得阿里云免费试用。通过此免费试用优惠,用户可以免费试用免费试用活动页面上列出的每种产品一次。如果您有多个帐
我以为它们存储在cookie中-但不,检查cookie没有任何结果。session也不存储它们。那么,我在哪里可以找到它们?我需要这个来直接设置它们(而不是通过flashhash)。 最佳答案 它们存储在inyoursessionstore.自rails2.0以来的默认设置是cookie存储,但请检查config/initializers/session_store.rb以检查您是否使用默认设置以外的东西。 关于ruby-on-rails-闪存消息存储在哪里?,我们在StackOverf
我的ruby脚本从命令行参数获取某些输入。它检查是否缺少任何命令行参数,然后提示用户输入。但是我无法使用gets从用户那里获得输入。示例代码:test.rbname=""ARGV.eachdo|a|ifa.include?('-n')name=aputs"Argument:#{a}"endendifname==""puts"entername:"name=getsputsnameend运行脚本:rubytest.rbraghav-k错误结果:test.rb:6:in`gets':Nosuchfileordirectory-raghav-k(Errno::ENOENT)fromtes
1.问题描述使用Python的turtle(海龟绘图)模块提供的函数绘制直线。2.问题分析一幅复杂的图形通常都可以由点、直线、三角形、矩形、平行四边形、圆、椭圆和圆弧等基本图形组成。其中的三角形、矩形、平行四边形又可以由直线组成,而直线又是由两个点确定的。我们使用Python的turtle模块所提供的函数来绘制直线。在使用之前我们先介绍一下turtle模块的相关知识点。turtle模块提供面向对象和面向过程两种形式的海龟绘图基本组件。面向对象的接口类如下:1)TurtleScreen类:定义图形窗口作为绘图海龟的运动场。它的构造器需要一个tkinter.Canvas或ScrolledCanva
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L