本节介绍旋转变压器的结构、原理、原副边补偿方法
本节介绍线性旋变、多极旋变
本节介绍旋变在测量角度、改变相位、位置解算等方面的应用
文章目录
旋转变压器,简称旋变,用来测量旋转物体的角位移。其本质是一个变压器,通过电磁耦合得到感应电压。原边和副边分别处于定子和转子上,其错开的角度不同,电磁耦合程度不同,副边所得电压幅值就不同,借此测量角度。
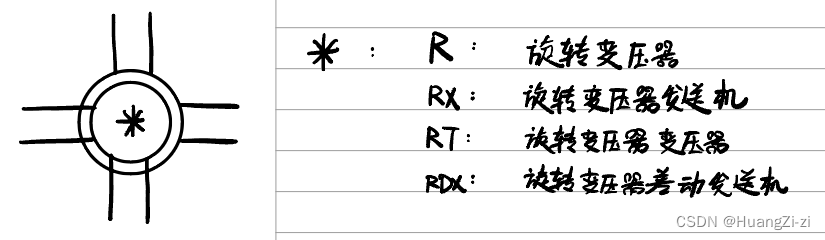
根据输出与输入的函数关系,可以分为:
根据磁极对数可以分为:两极旋变和多极旋变。根据结构形式可分为:接触式旋变和非接触式旋变、一体式和分体式旋变。
主要用途分两类:
旋转变压器分有刷式和无刷式,其原理相同。有刷式通过电刷和滑环将输出信号引出,无刷式通过附加变压器将输出信号引出。
旋转变压器的电路符号:
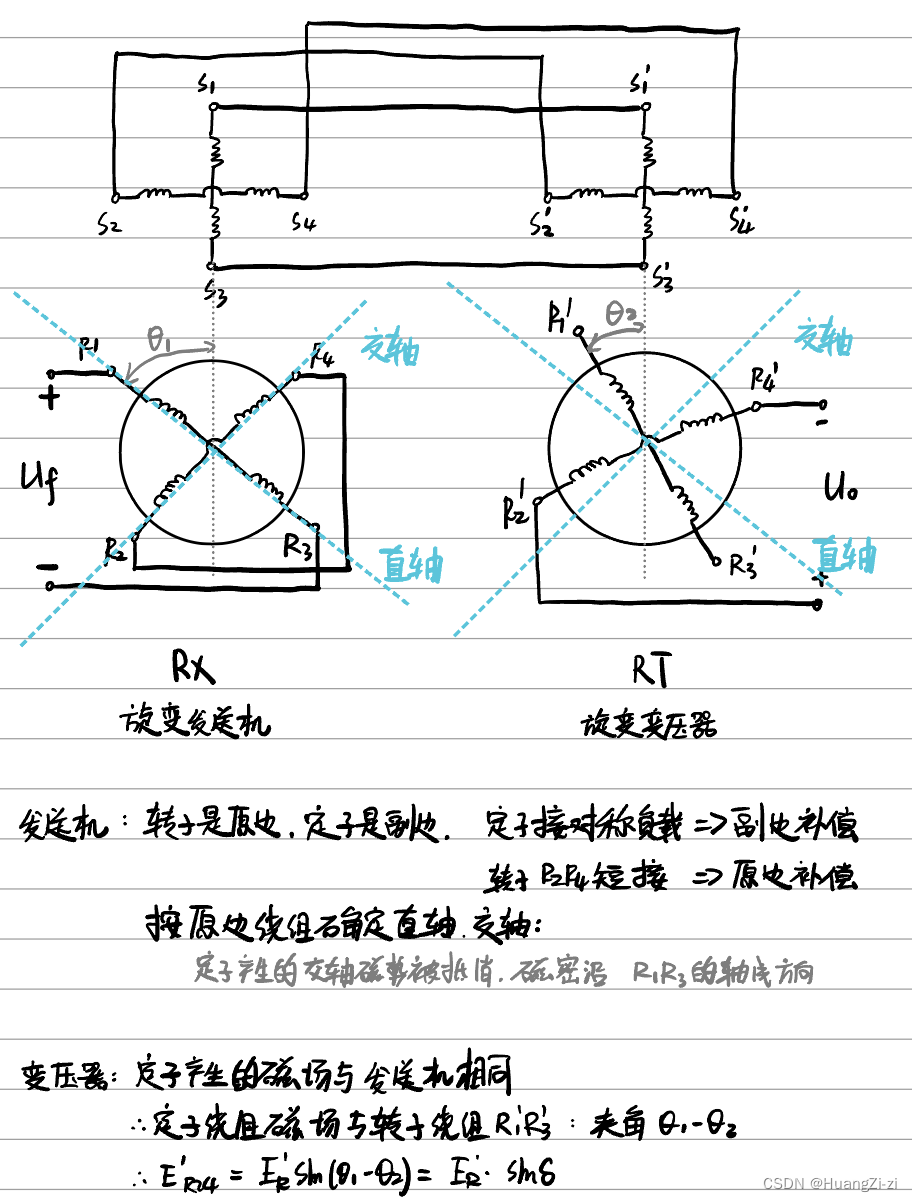
以两极有刷旋变为例:
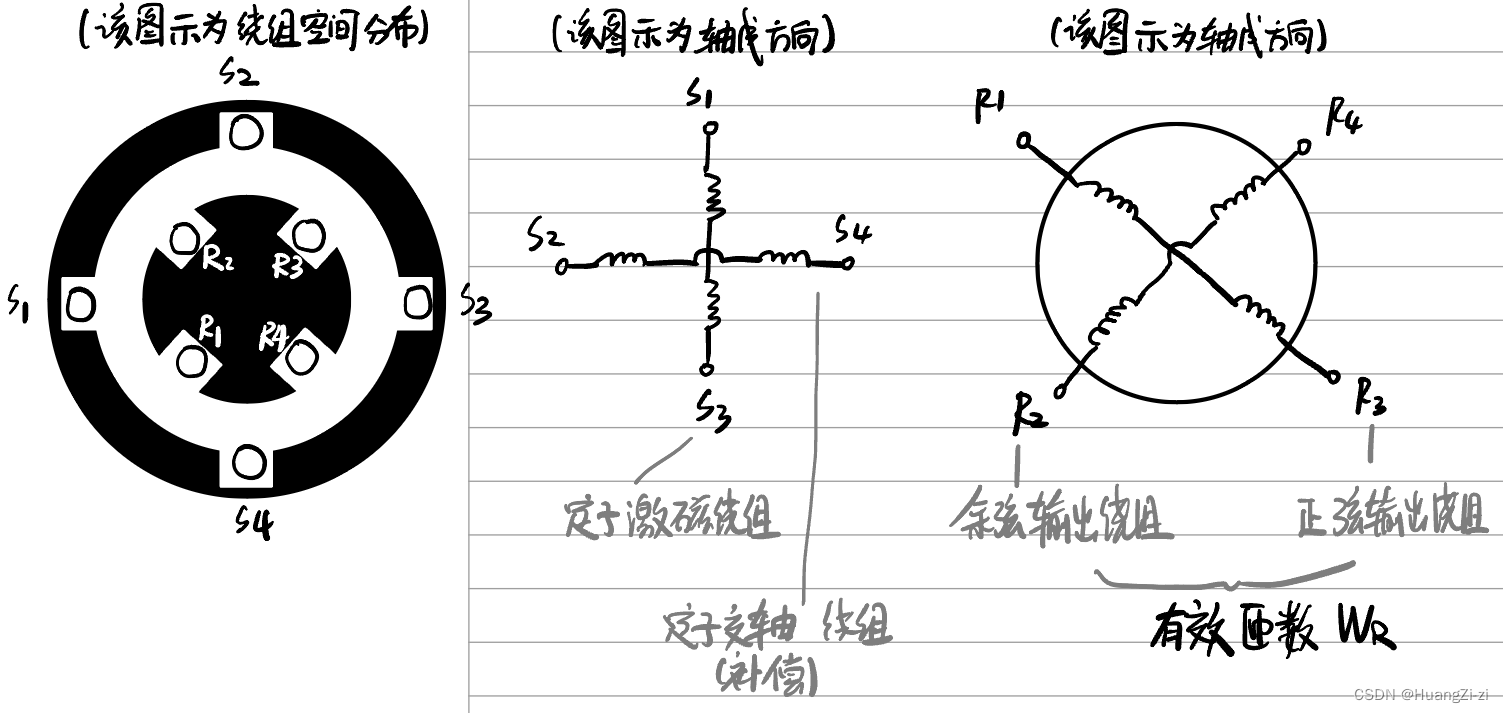
结构与绕线式异步电动机相似。定、转子铁心槽中分别嵌放两个轴线相互垂直的分布式绕组(绘图为了简便,等效为集中式绕组处理)
空载运行时除
S
1
S
3
S_1S_3
S1S3接励磁电压,其他绕组均开路。
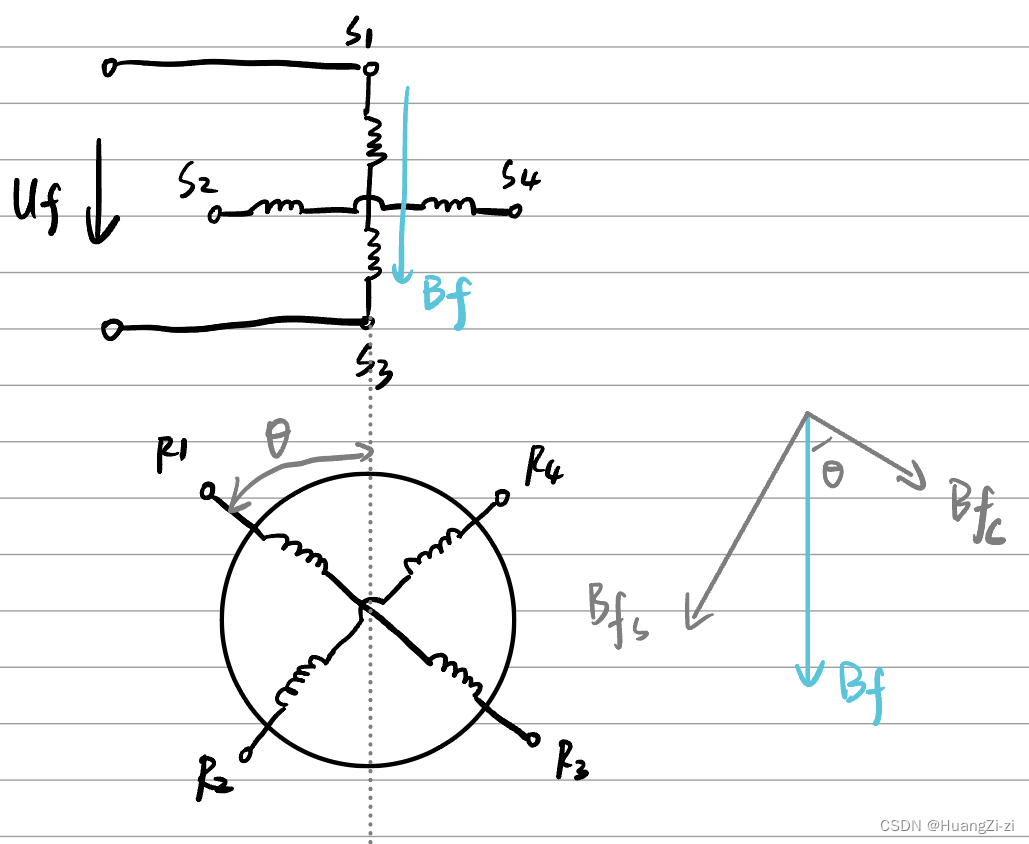
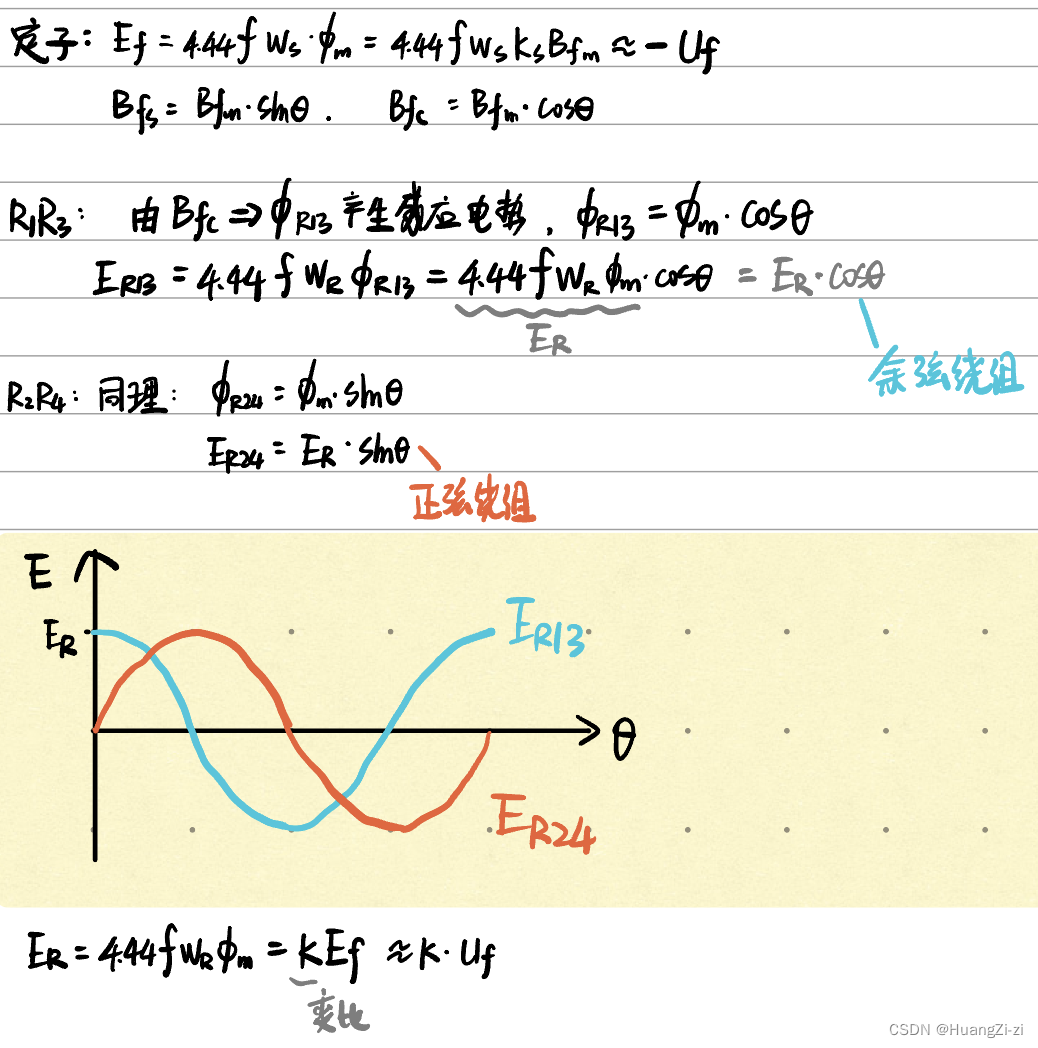
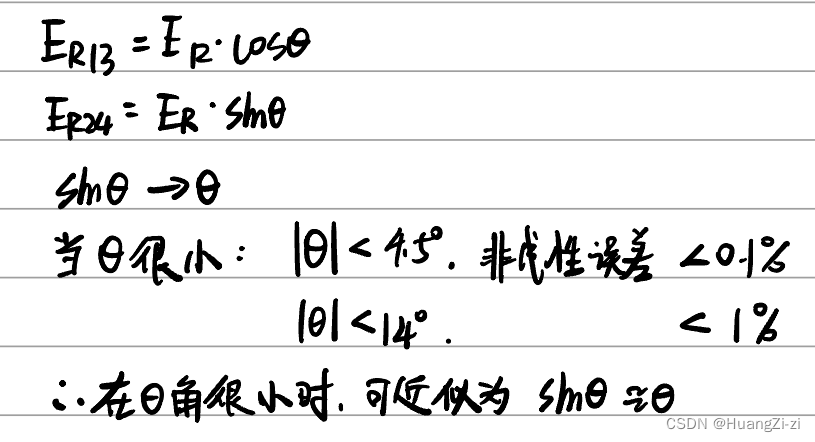
两个绕组中感应电势的有效值:
E
R
13
=
E
R
cos
θ
E
R
24
=
E
R
sin
θ
E_{R13}=E_R\cos \theta \\E_{R24}=E_R\sin \theta
ER13=ERcosθER24=ERsinθ,称
R
1
R
3
R_1R_3
R1R3为余弦绕组,
R
2
R
4
R_2R_4
R2R4为正弦绕组
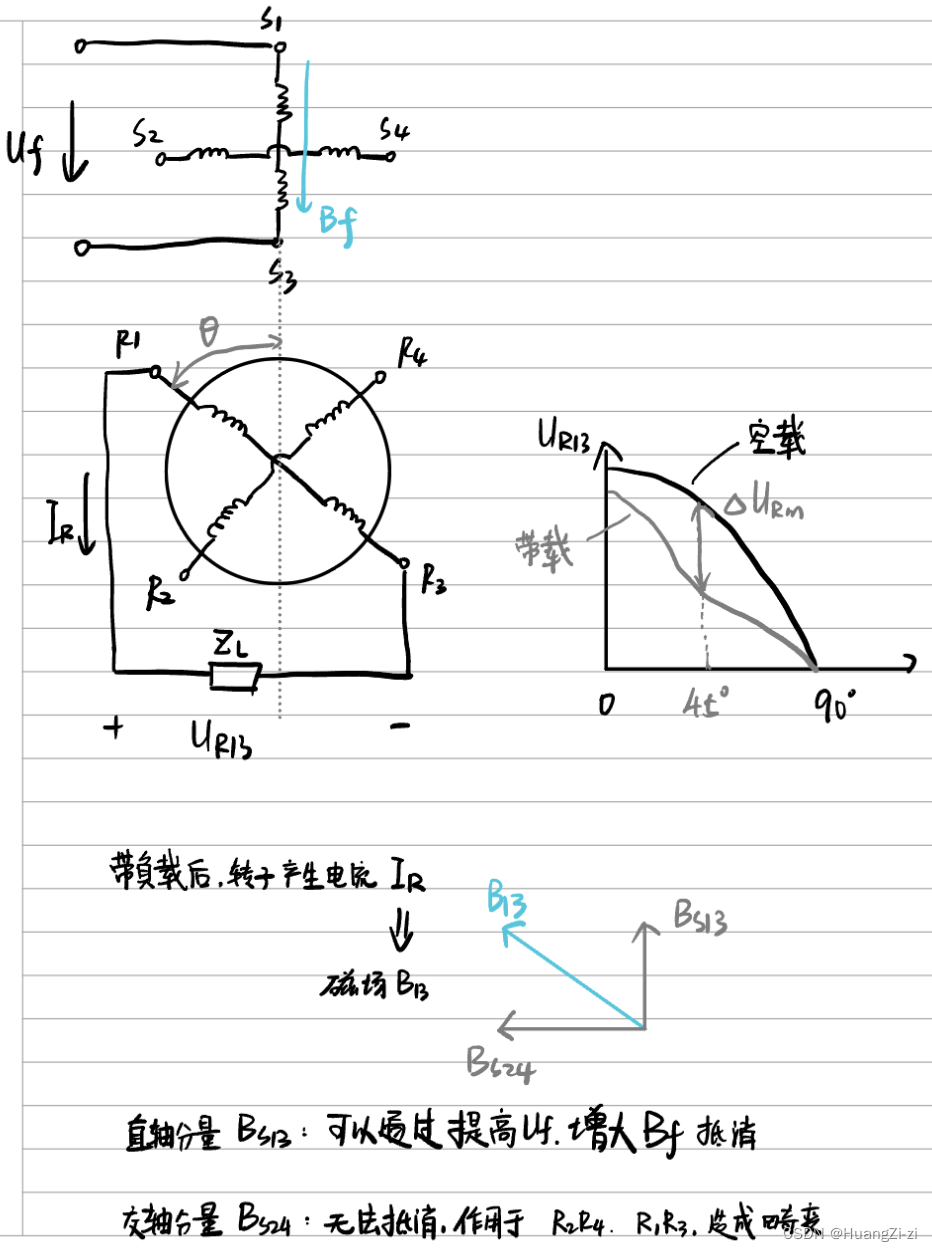
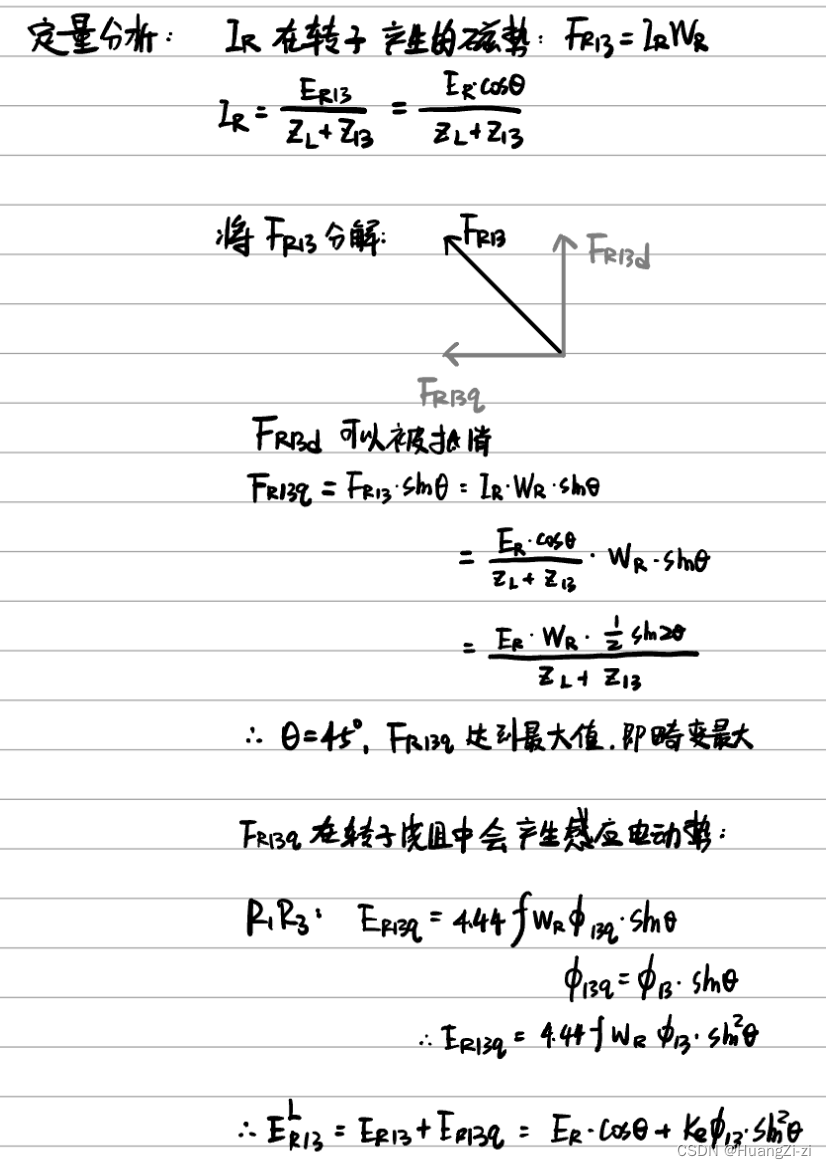
带负载后旋变输出电压与正余弦函数之间出现误差。转角45度时误差最大。负载电流越大,误差越大。称这种输出特性偏离理想正余弦规律的现象为畸变。
产生畸变的原因:带负载后副边有了电流,进而产生磁场,感应出感应电势,影响输出。
想要补偿负载时输出电压的畸变,则应用没有利用的两个绕组:
首先介绍一下交轴和直轴。一般以与励磁绕组磁场轴线平行的轴为直轴,与直轴相正交的轴为交轴。
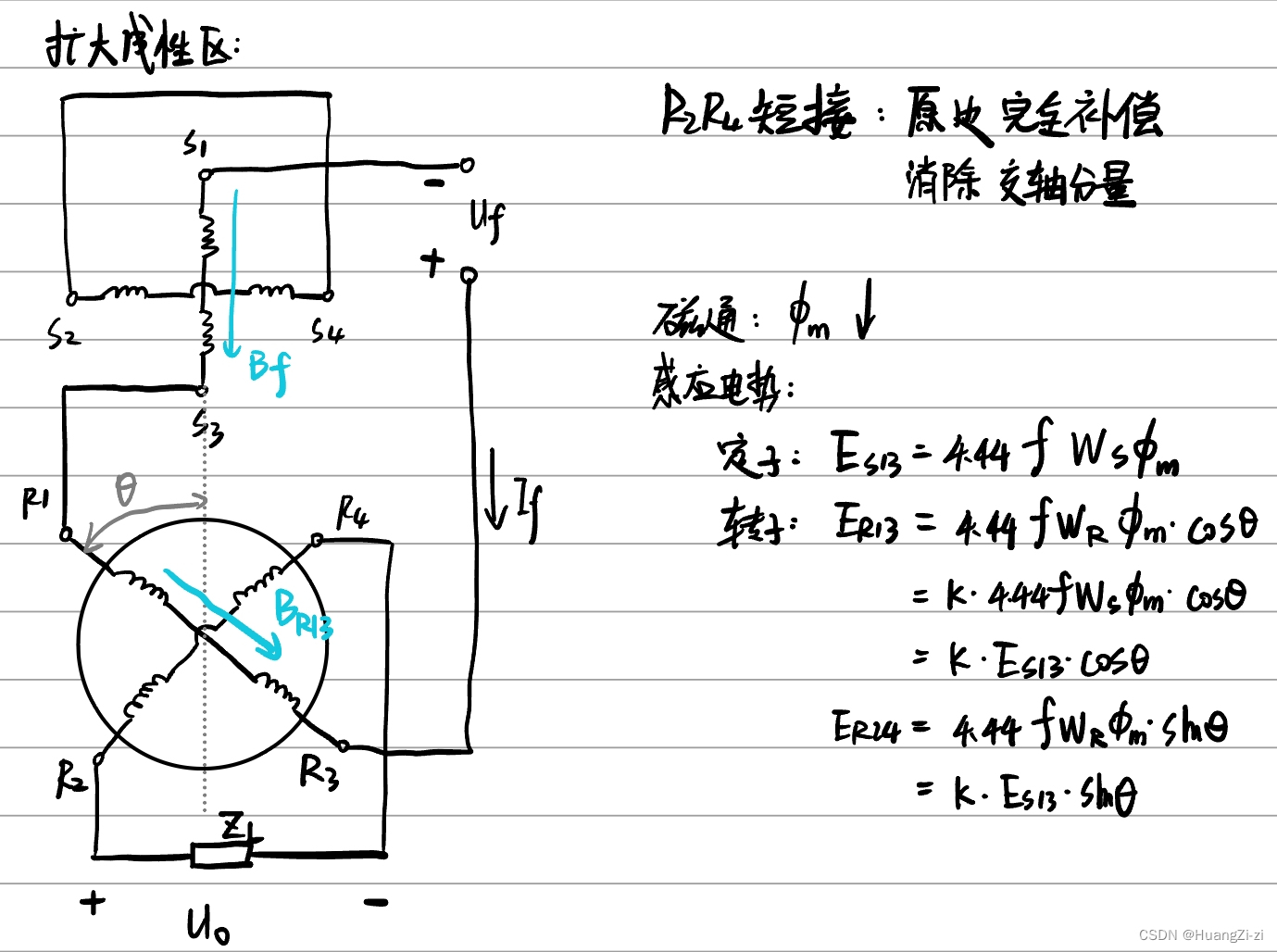
副边补偿的原理是,将副边两个绕组都接负载,使其产生的交轴磁势相互抵消。
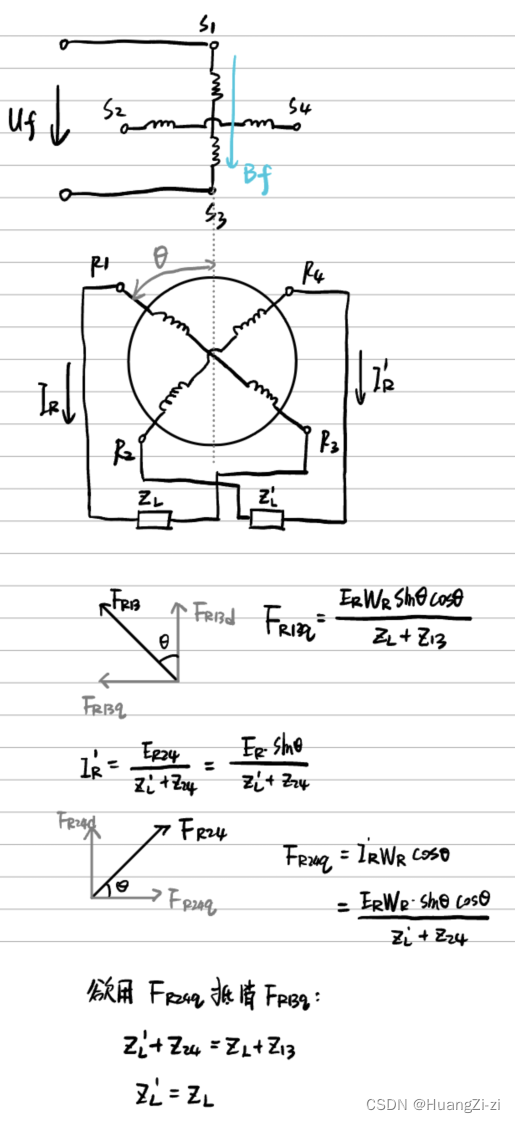
交轴磁势完全抵消的条件是:
Z
L
′
=
Z
L
Z_L'=Z_L
ZL′=ZL
直轴:
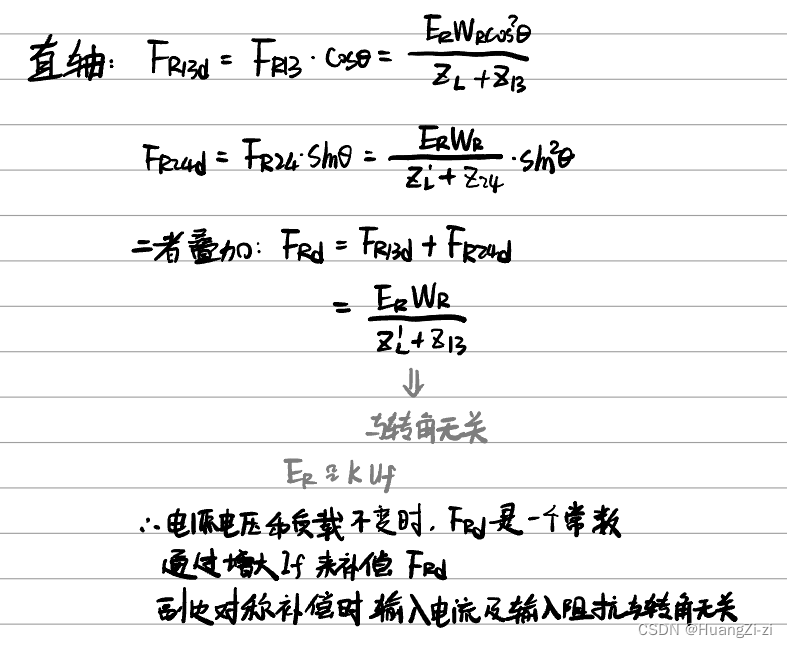
直轴磁势与转角无关,可以通过增大励磁电流进行补偿。
副边对称补偿要求 Z L ′ = Z L Z_L'=Z_L ZL′=ZL,对于负载阻抗变化的情况,很难实现完全补偿
原边补偿的原理是将原边补偿绕组闭合,利用其中感应电流产生的磁势抵消转子产生的交轴磁势。
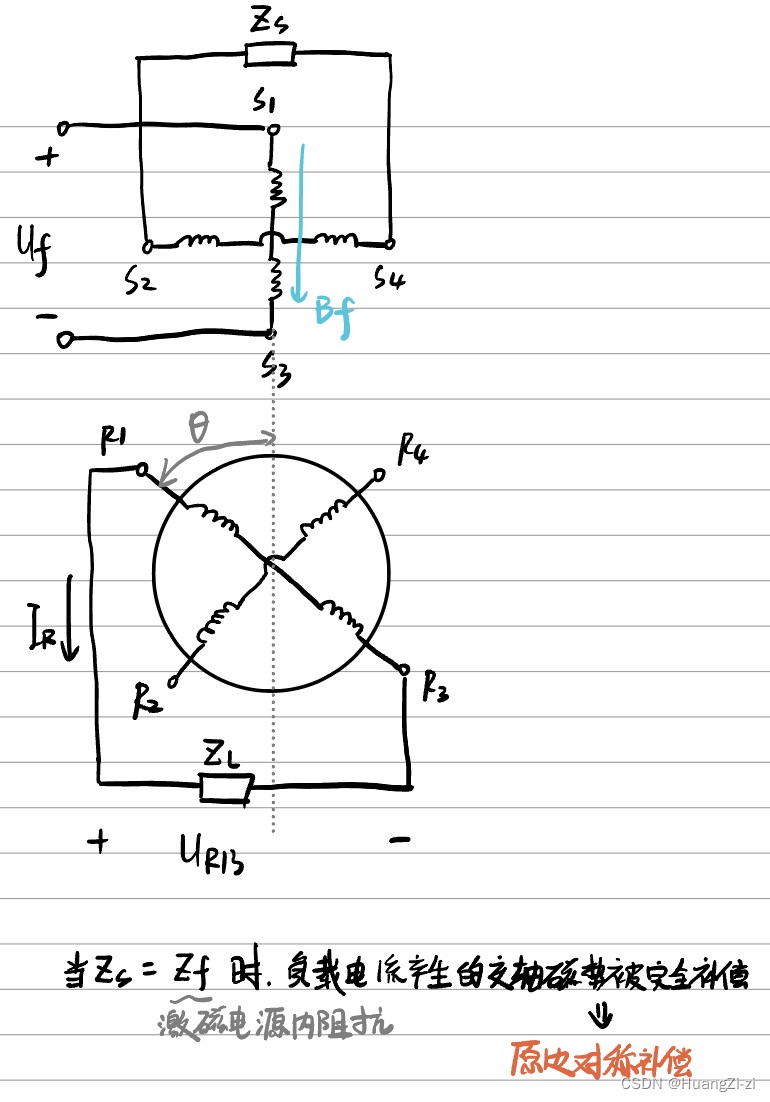
可以证明,原边对称补偿的条件是:
Z
s
=
Z
f
Z_s=Z_f
Zs=Zf,
Z
f
Z_f
Zf为励磁电源内阻。
由于电源内阻很小,所以可以近似
Z
s
=
0
Z_s=0
Zs=0,即把补偿绕组直接短路
使用原边补偿,则负载阻抗的改变不影响补偿程度。且不需要测量负载阻抗,直接短接就好,实现简单。
但缺点是 S 1 S 3 S_1S_3 S1S3输入电流与转角有关,因此输入功率与输入阻抗都随转角变化。且由于负载变化时补偿磁场不变,因此不能完全消除畸变。
一般为了更好的补偿效果,会同时采用副边补偿和原边补偿
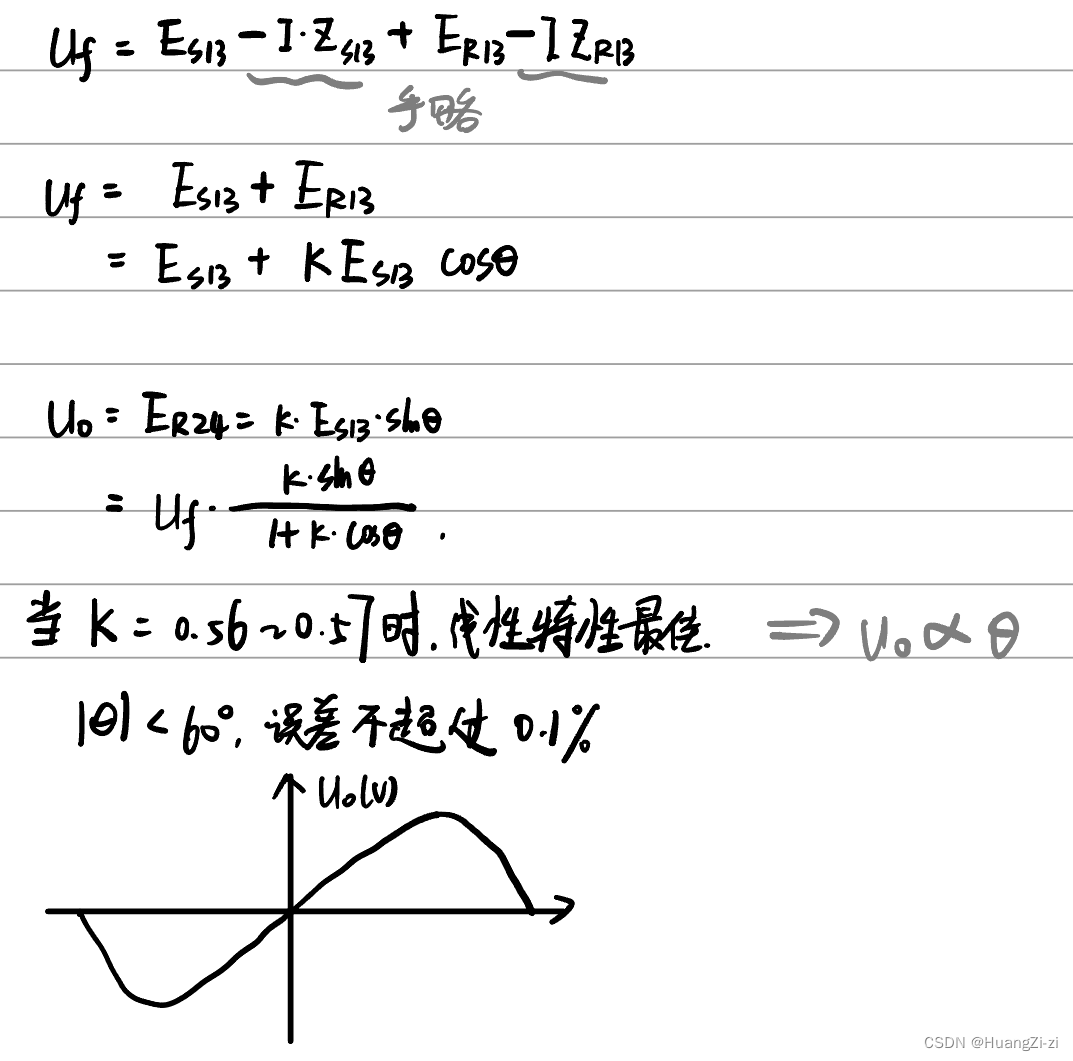
对于正余弦规律:
转角小时是线性元件。但精度有限、转角范围有限。
在结构不变的情况下扩大线性区:
使用时仍需注意转角范围限制。
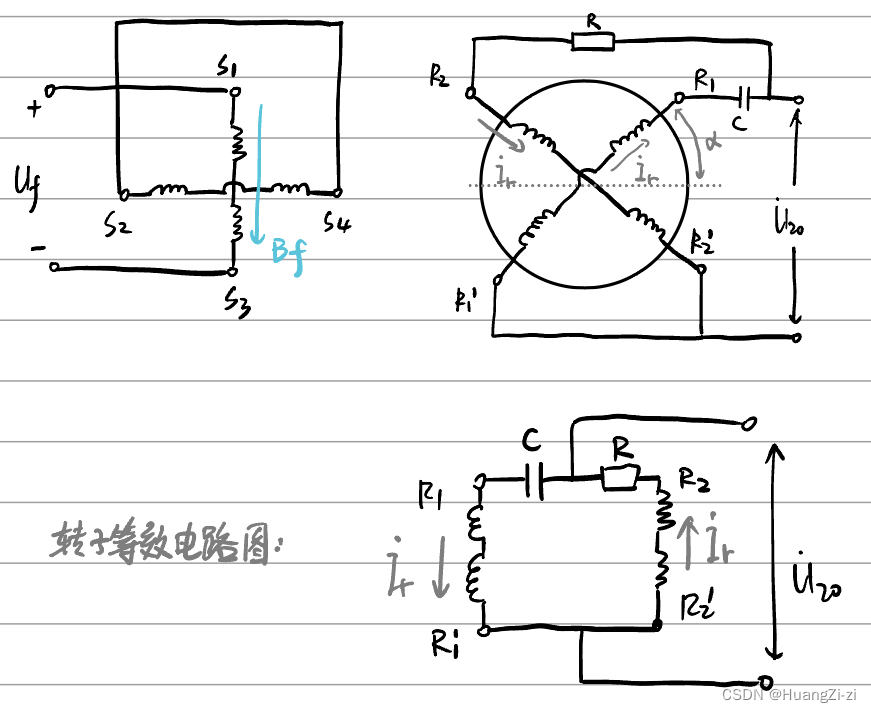
转子开路输出
按照其并联关系列方程组:
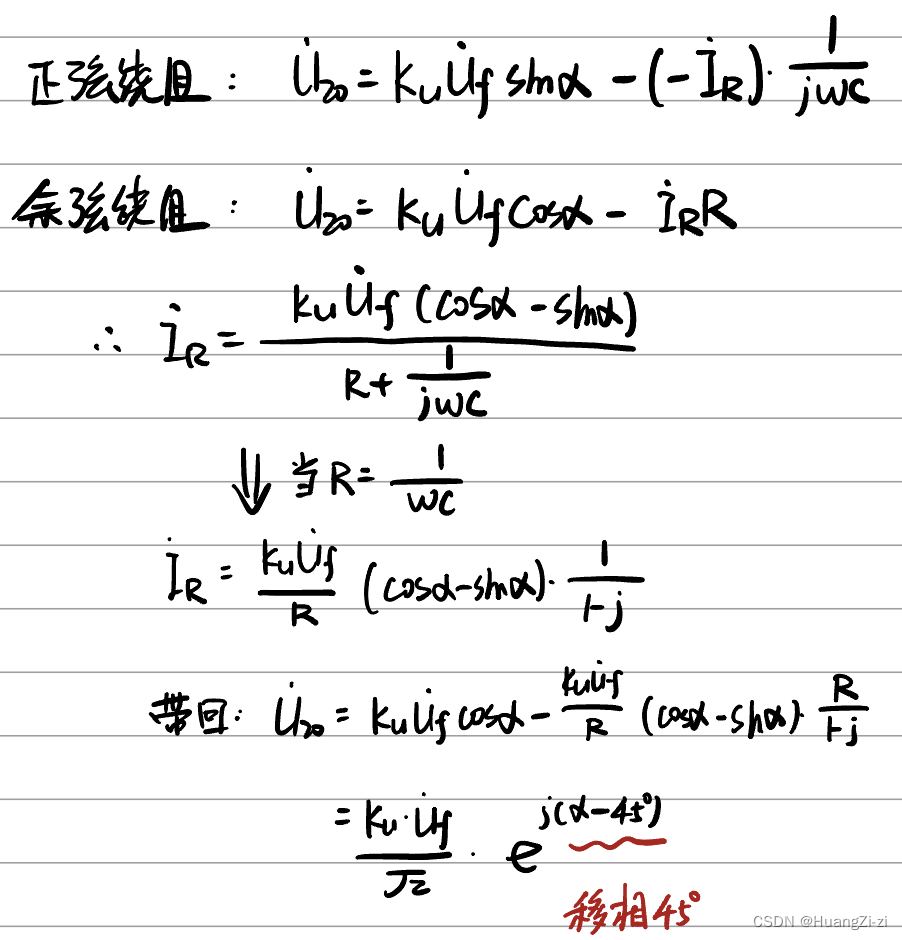
输出电压的相位滞后输入角度
α
45
°
\alpha\ 45\degree
α 45°
以上是空载情况,在带载情况下,还需满足:
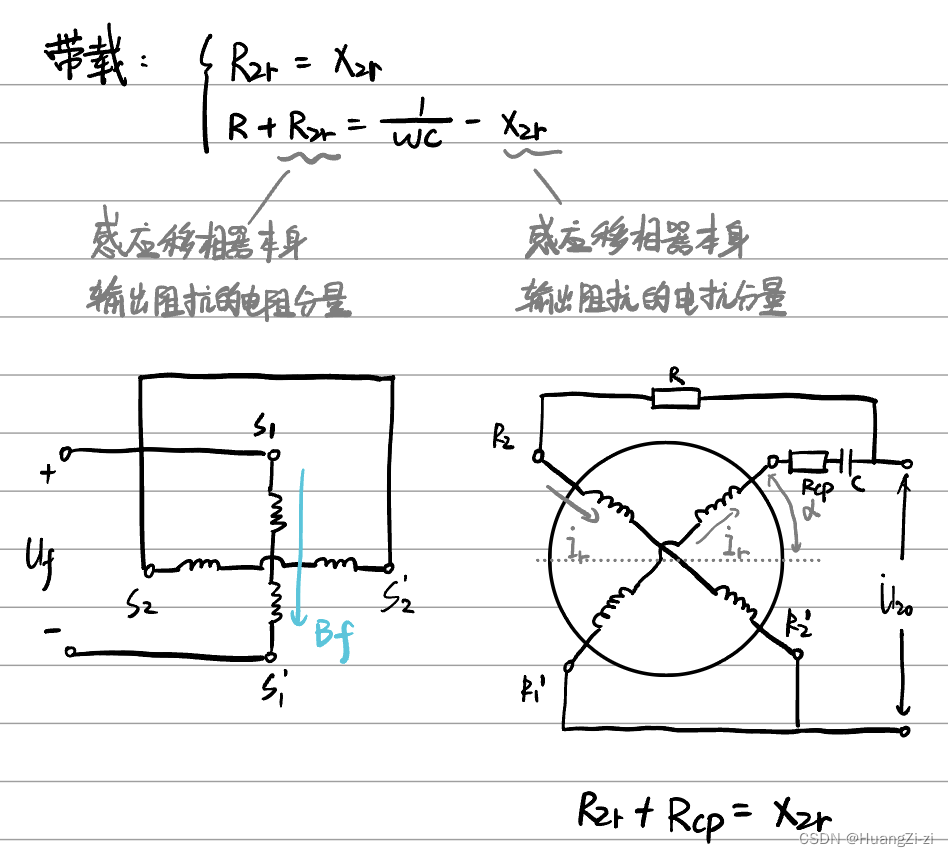
当高频域
ω
\omega
ω很大时,
R
2
r
<
<
X
2
r
R_{2r}<<X_{2r}
R2r<<X2r,为了保证精度,往往还在正弦绕组中串连一个补偿电阻
R
c
p
R_{cp}
Rcp
旋转变压器最主要的缺点就是精度不高,而多极旋变就是为了提高测量精度而设计的。
其工作原理与两极旋变完全相同,仅是磁场极对数增加,使得输出电压的有效值随转角变化的周期不同
对于p对极的多极旋变:
U
s
(
p
)
=
U
m
(
p
)
sin
p
θ
U
c
(
p
)
=
U
m
(
p
)
cos
p
θ
U_{s(p)}=U_{m(p)}\sin{p\theta}\\U_{c(p)}=U_{m(p)}\cos{p\theta}
Us(p)=Um(p)sinpθUc(p)=Um(p)cospθ
在0~360度范围内,多极旋变的输出是周期性函数,因此仅从输出电压不能唯一确定转角。
在实际系统中把两极旋变和多极旋变配合使用,组成双通道测角系统,使用两极旋变粗测,多极旋变精测
如图:测量
θ
1
θ
2
\theta_1 \theta_2
θ1θ2角度差,并驱动电机使其趋于相等
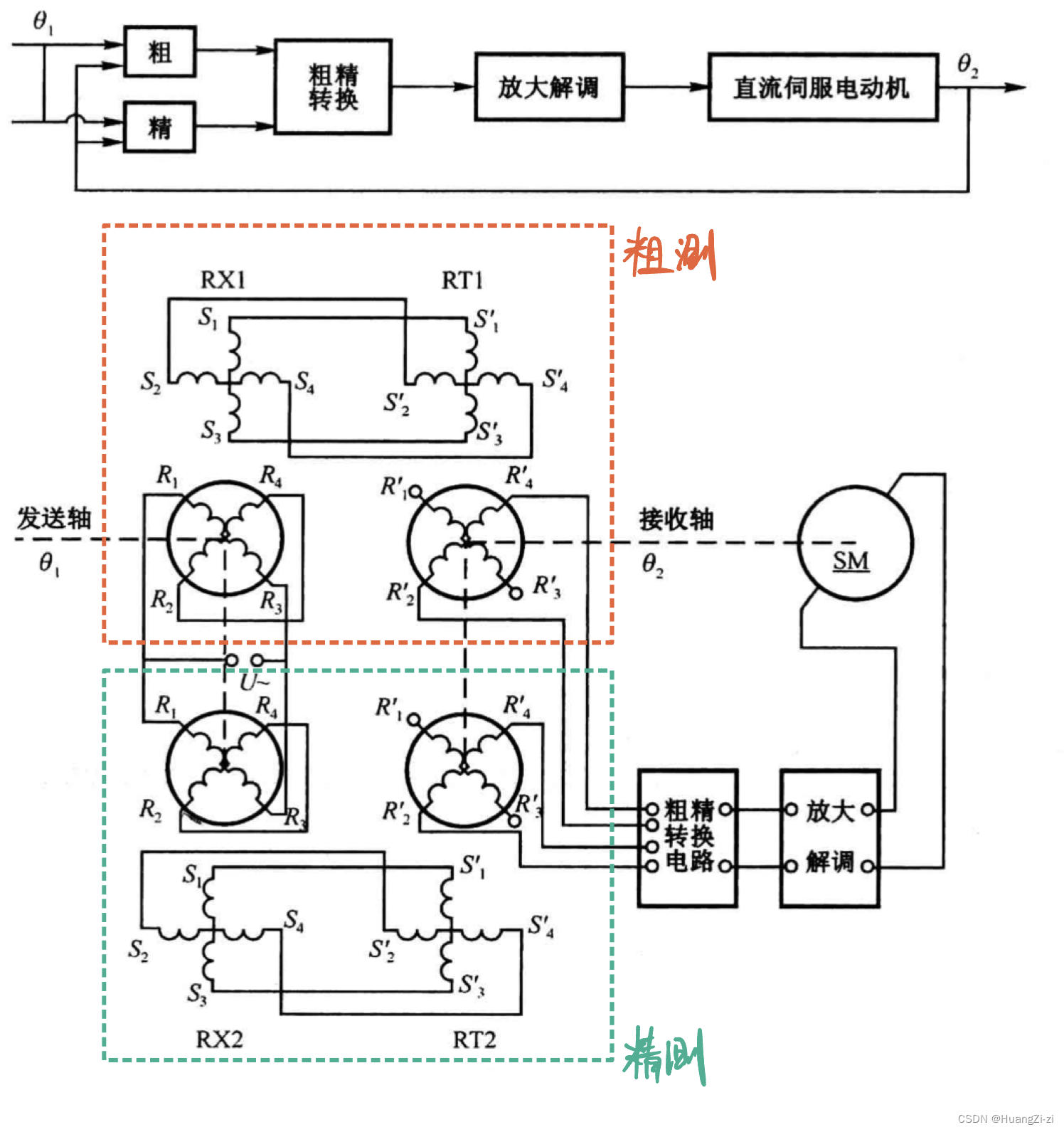
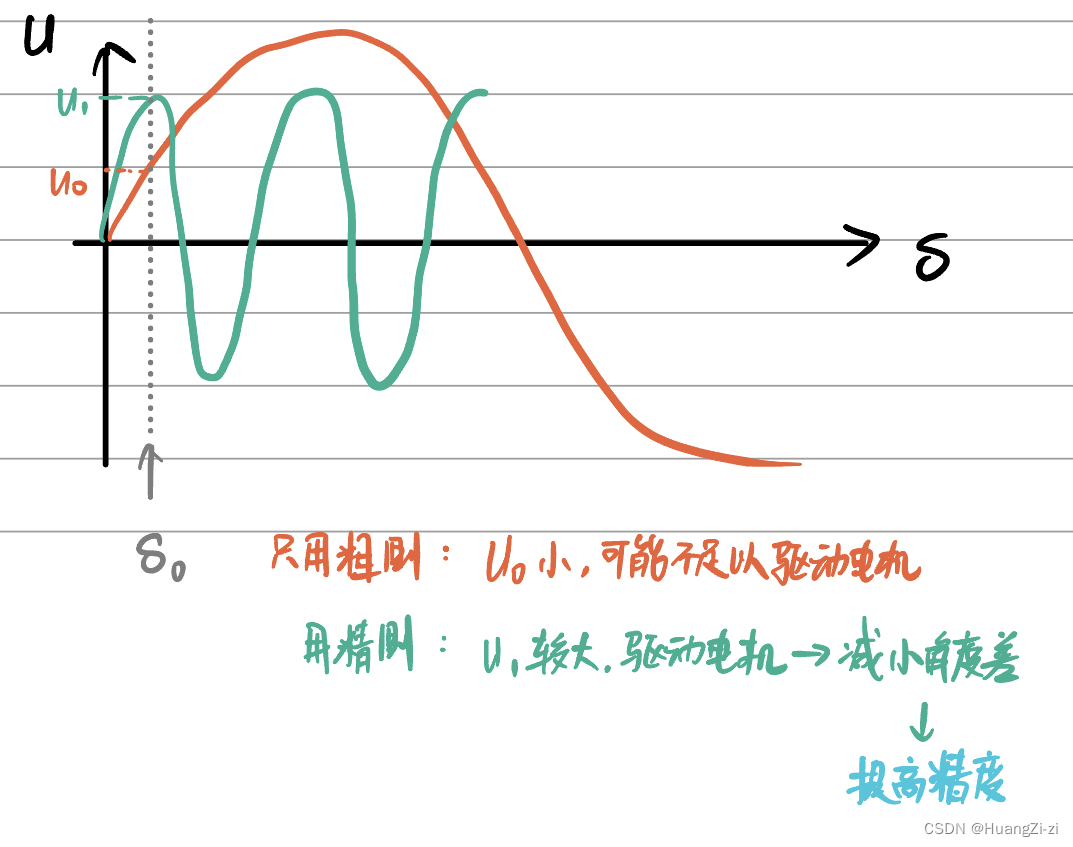
粗精转换电路,当失调角小的时候输出精测通道,失调角度大的时候输出粗测通道。
点向量坐标矩阵的几何意义介绍旋转矩阵的几何含义之前,先介绍一下点向量坐标矩阵的几何含义点:在一维空间下就是一个标量,如同一条直线上,以任意某一个位置为0点,以一定的尺度间隔为1,2,3...,相反方向为-1,-2,-3...;如此就形成了一维坐标系,这时候任何一个点都可以用一个数值表示,如点p1=5,即即从原点出发沿着x轴正方向移动5个尺度;点p2=-3,负方向移动3个尺度; 在一维坐标系上过原点做垂直于一维坐标系的直线,则形成了二维坐标系,此时描述一个点需要两个数值来表示点p3=(3,2),即从原点出发沿着x轴正方向移动3个尺度,在此基础上沿着y轴正方向移动两个尺度的位置就是点p3。
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
我有一个Sinatra应用程序,它有一个长时间运行的进程(网络抓取工具)。我希望应用程序在爬虫运行时而不是在结束时刷新爬虫进度的结果。我已经考虑过fork请求并使用ajax做一些有趣的事情,但这是一个非常基本的单页应用程序,实际上只需要在它发生时将日志输出到浏览器。有什么建议吗? 最佳答案 更新(2012-03-21)从Sinatra1.3.0开始,您可以使用新的流式API:get'/'dostreamdo|out|out旧答案不幸的是,您没有可以简单地刷新到的流(这不适用于Rack中间件)。从路由block返回的结果可以简单地响应
欧拉角、旋转矩阵及四元数1.简介2.欧拉角2.1欧拉角定义2.2右手系和左手系2.3转换流程3.旋转矩阵4.四元数4.1四元数与欧拉角和旋转矩阵之间等效变换4.2测试Matlab代码5.总结1.简介常用姿态参数表达方式包括方向余弦矩阵、欧拉轴/角参数、欧拉角、四元数以及罗德里格参数等。高分辨率光学遥感卫星主要采用欧拉角与四元数对姿态参数进行描述。这里着重讲解欧拉角、旋转矩阵和四元数。2.欧拉角2.1欧拉角定义欧拉角是表征刚体旋转的一种方法之一,由莱昂哈德·欧拉引入的三个角度,用于描述刚体相对于固定坐标系的方向。在摄影测量、空间科学或其它技术领域,一般用一组(三个)欧拉角描述两个空间坐标之间的旋
最近更新的博客华为OD机试-卡片组成的最大数字(Python)|机试题算法思路华为OD机试-网上商城优惠活动(一)(Python)|机试题算法思路华为OD机试-统计匹配的二元组个数(Python)|机试题算法思路华为OD机试-找到它(Python)|机试题算法思路华为OD机试-九宫格按键输入(Python)|机试算法备考思路华为OD机试-身高排序(Python)|备考思路使用说明参加华为od机试,一定要注意不要完全背诵代码,需要理解之后模仿写出,通过率才会高。华为OD清单查看地址:blog.csdn.net/hihell/catego
1.变换1.1什么是变换?变换(Transform)是计算机图形学中非常重要的一部分。变换包含模型变换(Modelingtransform)以及视图变换(Viewtransform)。模型变换指的是变换模型(被拍摄物体)的位置,大小和角度;视图变换指的是变换照相机的位置和角度。从相对运动的角度来看,两种变换是可以相互转化的。1.2模型变换1.2.1二维变换缩放变换缩放变换(Scale)中,如果一个图片以原点(0,0)为中心缩放𝑠倍。那么点(𝑥,𝑦)变换后数学形式可以表示为写成矩阵形式为:当然,我们也可以给x轴和y轴不同的缩放倍数𝑠𝑥和𝑠𝑦。在非均匀情况下,缩放变换的矩阵形式为反射变换反射变换(
为Rails应用程序创建后台任务的首选方法是什么?我听说过Starling/Workling和优秀的ol'script/runner,但我很好奇哪种正在成为满足这一需求的实际方式?谢谢!澄清:我喜欢后台Rake的想法,但问题是,我需要持续运行或每10小时运行一次的东西。我不会奢侈地等待Web请求,它需要由服务器启动,与我网站上发生的事件异步。 最佳答案 RyanBates制作了三个可能真正对您有帮助的精彩截屏视频:RakeinBackgroundStarlingandWorklingCustomDaemon他谈到了使用每一种方法的各
我有一个Ruby脚本可以执行一些耗时较长的工作。它只是命令行,我想证明脚本仍在运行并且没有停止。我以前喜欢所谓的“旋转光标”,我设法在Windows下用Ruby重现了它。问题:这在其他操作系统中是否有效?如果没有,是否有独立于操作系统的方法来完成此任务?请不要使用IRB解决方案。10.times{print"/"sleep(0.1)print"\b"print"-"sleep(0.1)print"\b"print"\\"sleep(0.1)print"\b"print"|"sleep(0.1)print"\b"} 最佳答案 是的,这
我刚刚将RuboCop添加到一个Rails项目并安装了Sublime包以在编辑器中查看RuboCop建议。我想弄清楚如何将最大行长度从80个字符更改为80个字符,或者完全忽略该规则。目前正在使用:RuboCop(gem)SublimeRuboCopSublimeLinter-rubocop 最佳答案 在您的代码中,您可以像这样禁用一堆行:#rubocop:disableLayout/LineLengthputs"Thislineislonnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnnn
我有以下使用JS和CSS旋转轮子的代码:varprefix=(function(){if(document.body.style.MozTransform!==undefined){return"MozTransform";}elseif(document.body.style.WebkitTransform!==undefined){return"WebkitTransform";}elseif(document.body.style.OTransform!==undefined){return"OTransform";}else{return"transform";}}()),ro