图来自文章Simulation and Synthesis Techniques for Asynchronous FIFO Design
一个异步FIFO一共由五个基本模块组成,分别是
①RAM存储器模块
②FIFO写地址以及写满判断模块(写控制端口)
③FIFO写时钟同步到读时钟模块
④FIFO读地址以及读空判断模块(读控制端口)
⑤FIFO读时钟同步到写时钟模块

下面是FIFO顶层模块概图:
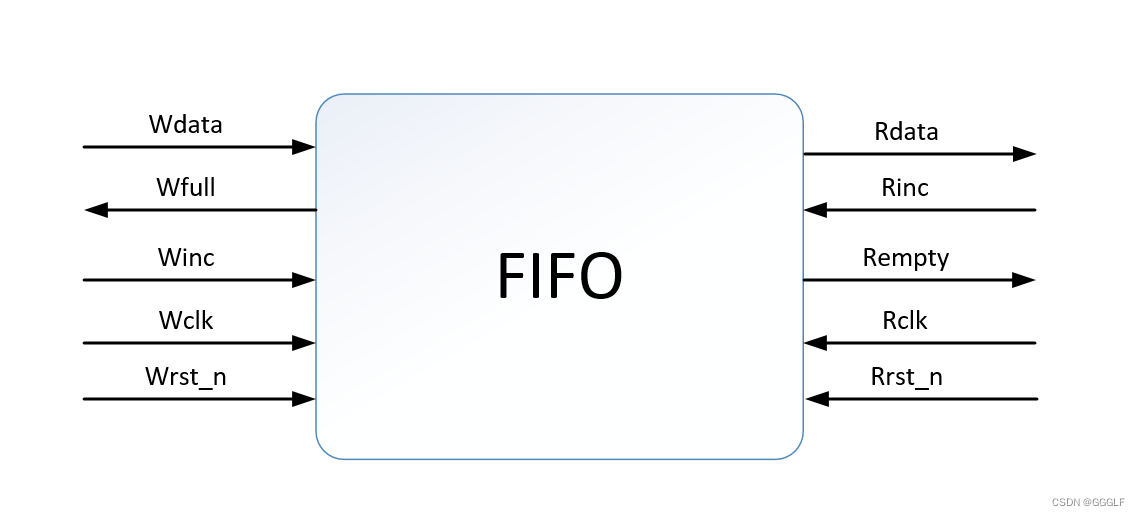
Wdata:写入数据
Wfull:写满信号
Winc:写请求信号(写使能信号)
Wclk:写时钟
Wrst_n:写复位信号(低电平有效)
Rdata:读出数据
Rempty:读空信号
Rinc:读请求信号(读使能信号)
Rclk:读时钟
Rrst_n:读复位信号(低电平有效)
随机存取存储器(Random Access Memory)随机访问内存(RAM)相当于PC机上的移动存储,用来存储和保存数据的。在任何时候都可以读写,RAM通常用作操作系统或其他正在运行的程序的临时存储介质(可称作系统内存)。不过,当电源关闭时时RAM不能保留数据,如果需要保存数据,就必须把它们写入到一个长期的存储器中(例如硬盘)。正因为如此,有时也将RAM称作"可变存储器"。
RAM的顶层模块图:
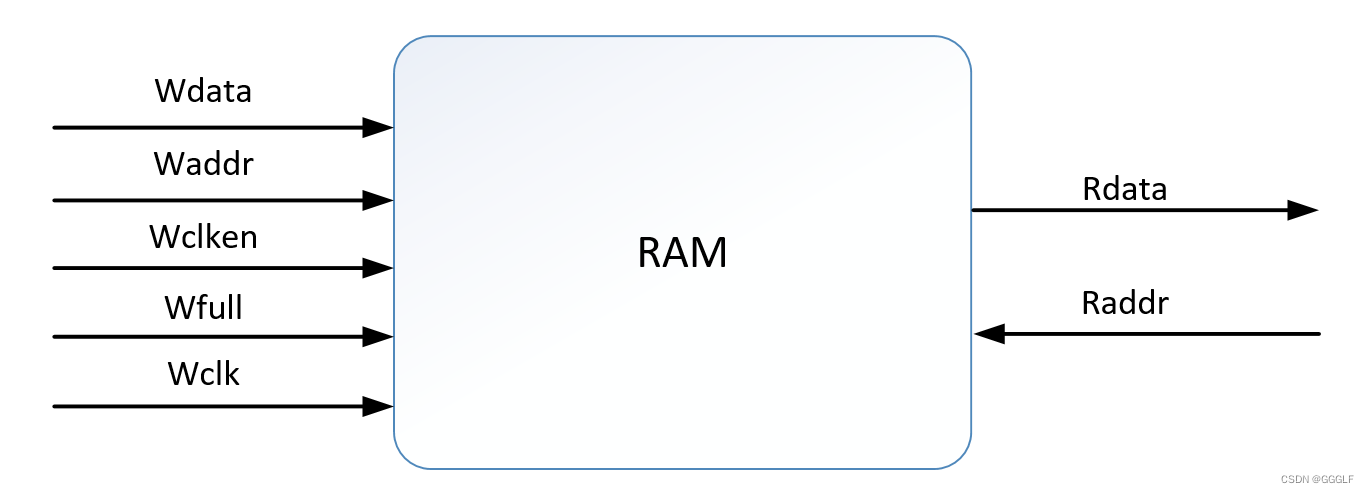
Wdata:写入的数据
Waddr:写地址
Wclken:写使能信号
Wfull:写满标志信号
Wclk:写时钟
Rdata:读数据
Raddr:读地址
Verilog代码如下:
根据上面RAM的总概图,定义的一个宽度为32位,深度为16的RAM(即定义了16个寄存器,每个寄存器的宽度为32)
module fifomem
#(
parameter DATASIZE = 32, // Memory data word width
parameter ADDRSIZE = 6 // 指针地址位宽设置为6,因为32=2^5,应该加一判断写满或读空
) // Number of mem address bits
(
output [DATASIZE-1:0] rdata, //read data
input [DATASIZE-1:0] wdata, //write data
input [ADDRSIZE-1:0] waddr, raddr,
input wclken, wfull, wclk
);
// RTL Verilog memory model
localparam DEPTH = 1<<ADDRSIZE; // leftshift is equal divide two
reg [DATASIZE-1:0] mem [0:DEPTH-1]; //即定义了16个寄存器,每个寄存器的位宽为32位
assign rdata = mem[raddr];
always @(posedge wclk) //当使能信号有效且还未写满的时候将数据写入实体中,与wclk时钟信号同步
if (wclken && !wfull)
mem[waddr] <= wdata;
endmodule读控制端口主要用于是否可以读取数据,读指针与读空的顶层模块图如下图
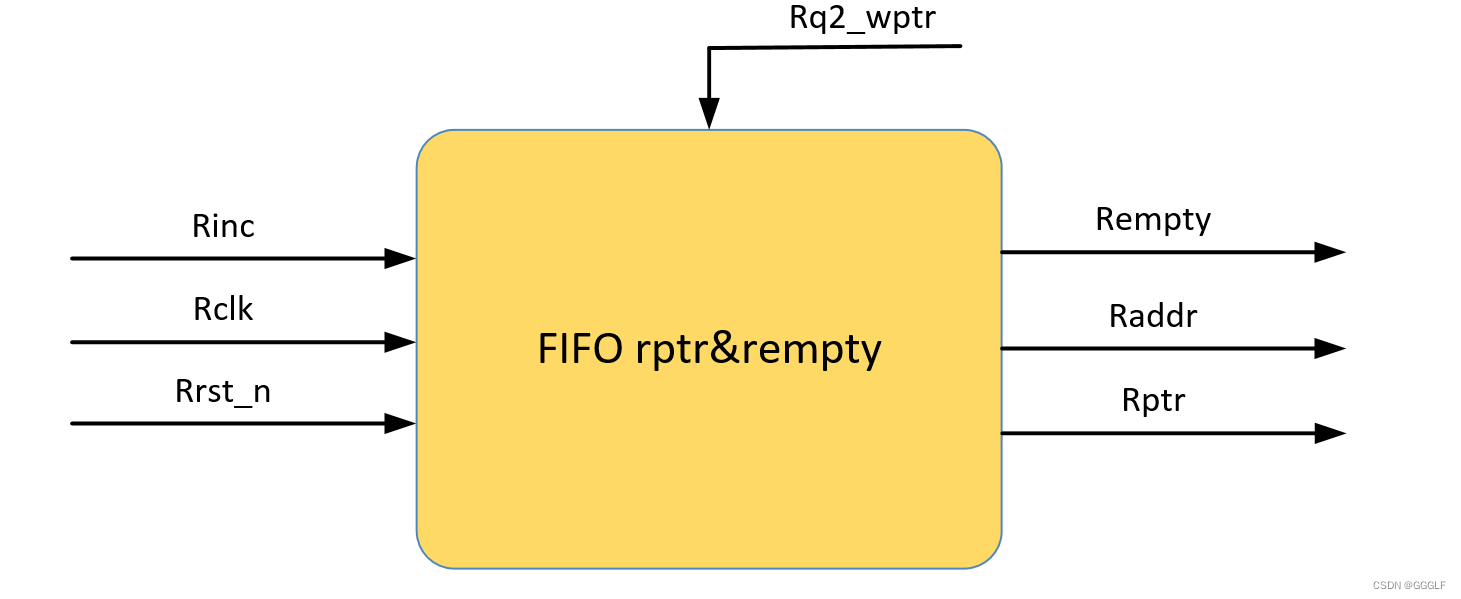
Rinc:读请求信号
Rclk:读时钟信号
Rrst_n:读复位信号
Raddr:二进制形式的写地址
Rempty:读空信号
Rptr:格雷码形式的读指针
Rq2_wptr:同步后的写指针
作用:当时钟信号来且读请求信号有效时,读出一组数据,并且同时读地址向下加一位。然后将读地址转换为格雷码,判断是否为读空。(基于顶层模块进行理解)
读空的判断:读地址指针追上写地址指针
Verilog代码如下:
module rptr_empty
#(
parameter ADDRSIZE = 6
)
(
output reg rempty,
output [ADDRSIZE-1:0] raddr, //二进制形式的读地址
output reg [ADDRSIZE :0] rptr, //格雷码形式的读指针
input [ADDRSIZE :0] rq2_wptr, //同步后的写指针
input rinc, rclk, rrst_n
);
reg [ADDRSIZE:0] rbin;//寄存地址,方便用于计算或者转换为格雷码
wire [ADDRSIZE:0] rgraynext, rbinnext;
// GRAYSTYLE2 pointer
//将二进制的读指针与格雷码进制的读指针同步
always @(posedge rclk or negedge rrst_n)
if (!rrst_n) begin
rbin <= 0;
rptr <= 0;
end
else begin
rbin <= rbinnext; //直接作为存储实体的地址
rptr <= rgraynext;//输出到 sync_r2w.v模块,被同步到 wrclk 时钟域
end
// Memory read-address pointer (okay to use binary to address memory)
assign raddr = rbin[ADDRSIZE-1:0]; //直接作为存储实体的地址,比如连接到RAM存储实体的读地址端。
assign rbinnext = rbin + (rinc & ~rempty); //不空且有读请求的时候读地址加1
assign rgraynext = (rbinnext>>1) ^ rbinnext; //将二进制的读指针转为格雷码
// FIFO empty when the next rptr == synchronized wptr or on reset
assign rempty_val = (rgraynext == rq2_wptr); //当读指针等于同步后的写指针,则为空,即读空。
always @(posedge rclk or negedge rrst_n)
if (!rrst_n)
rempty <= 1'b1;
else
rempty <= rempty_val;
endmodule代码理解:
1.当复位信号有用时,读地址和读指针都为空,否则将读地址和读指针都储存起来
2.当读请求信号有用且没有读空时,读地址加一,同时利用前后的读地址计算出格雷码形式的读指针
3. 当读指针等于同步后的写指针时,即为读空。
写控制端口主要用于是否可以写入数据,写指针与写满的顶层模块图如下图

Winc:写请求信号
Wclk:写时钟信号
Wrst_n:写复位信号
Waddr:二进制形式的写地址
Wfull:写空信号
Wptr:格雷码形式的写指针
Wq2_rptr:同步后的读指针
作用:当时钟信号来且写请求信号有效时,写出一组数据,并且同时写地址向下加一位。然后将写地址转换为格雷码,判断是否为写满。(基于顶层模块进行理解)
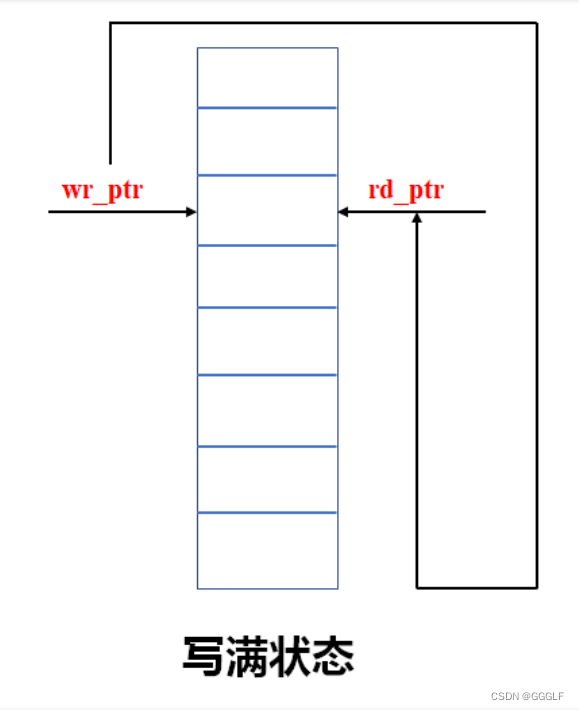
写满的判断:写地址指针再次追上读地址指针
Verilog代码如下:
module wptr_full
#(
parameter ADDRSIZE = 4
)
(
output reg wfull,
output [ADDRSIZE-1:0] waddr,//二进制形式的写地址
output reg [ADDRSIZE :0] wptr, //格雷码形式的写指针
input [ADDRSIZE :0] wq2_rptr,//同步后的读指针
input winc, wclk, wrst_n
);
reg [ADDRSIZE:0] wbin;
wire [ADDRSIZE:0] wgraynext, wbinnext;
// GRAYSTYLE2 pointer
always @(posedge wclk or negedge wrst_n)
if (!wrst_n)
{wbin, wptr} <= 0;
else
{wbin, wptr} <= {wbinnext, wgraynext};
// Memory write-address pointer (okay to use binary to address memory)
assign waddr = wbin[ADDRSIZE-1:0];
assign wbinnext = wbin + (winc & ~wfull);//写请求且没写满时,地址加一
assign wgraynext = (wbinnext>>1) ^ wbinnext; //将二进制码转换为格雷码
//-----------------------------------------------------------------
assign wfull_val = (wgraynext=={~wq2_rptr[ADDRSIZE:ADDRSIZE-1],wq2_rptr[ADDRSIZE-2:0]});
//
always @(posedge wclk or negedge wrst_n)
if (!wrst_n)
wfull <= 1'b0;
else
wfull <= wfull_val;
endmodule代码理解:
1.当复位信号有用时,写地址和写指针都为空,否则将写地址和写指针都储存起来
2.当写请求信号有用且没有写满时,写地址加一,同时利用前后的写地址计算出格雷码形式的写指针
3. 当写指针再次追上同步后的读指针时,即为写满。
顶层模块图如下所示
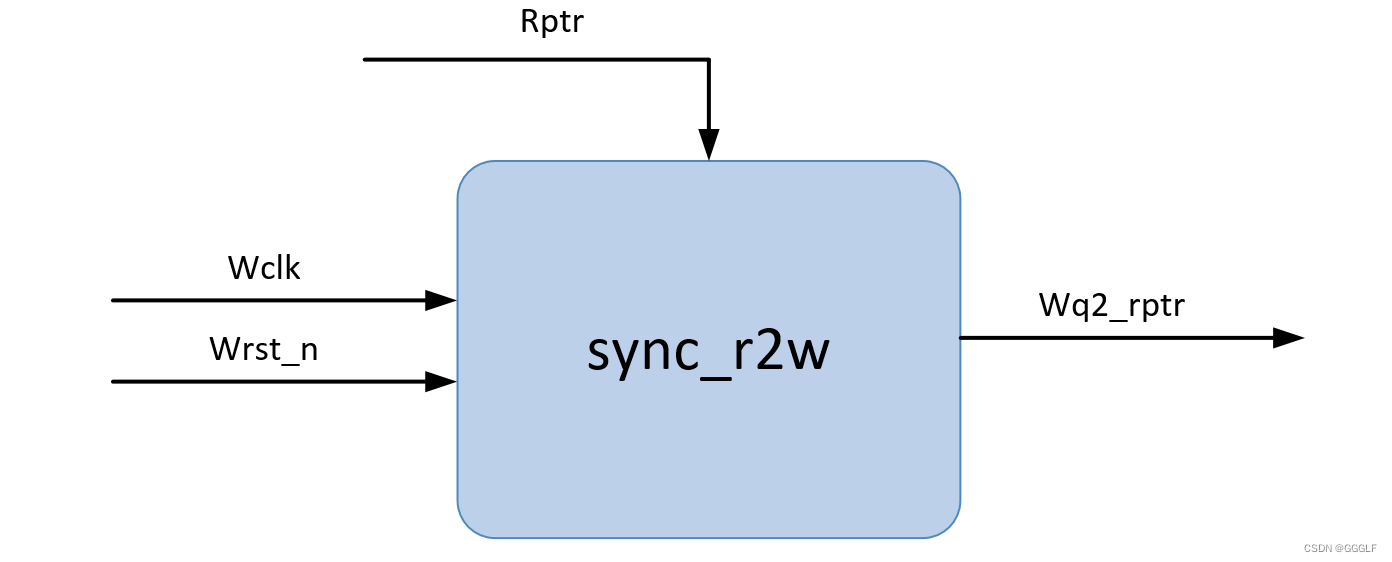
Verilog代码如下:
module sync_r2w
#(
parameter ADDRSIZE = 6
)
(
output reg [ADDRSIZE:0] wq2_rptr, //将读指针同步到写指针
input [ADDRSIZE:0] rptr, // 输入读指针
input wclk, wrst_n
);
reg [ADDRSIZE:0] wq1_rptr;
always @(posedge wclk or negedge wrst_n)
if (!wrst_n) begin
wq1_rptr <= 0; //清零复位信号
wq2_rptr <= 0;
end
else begin
wq1_rptr<= rptr;//两级寄存器
wq2_rptr<=wq1_rptr;
end
endmodule
顶层模块图如下所示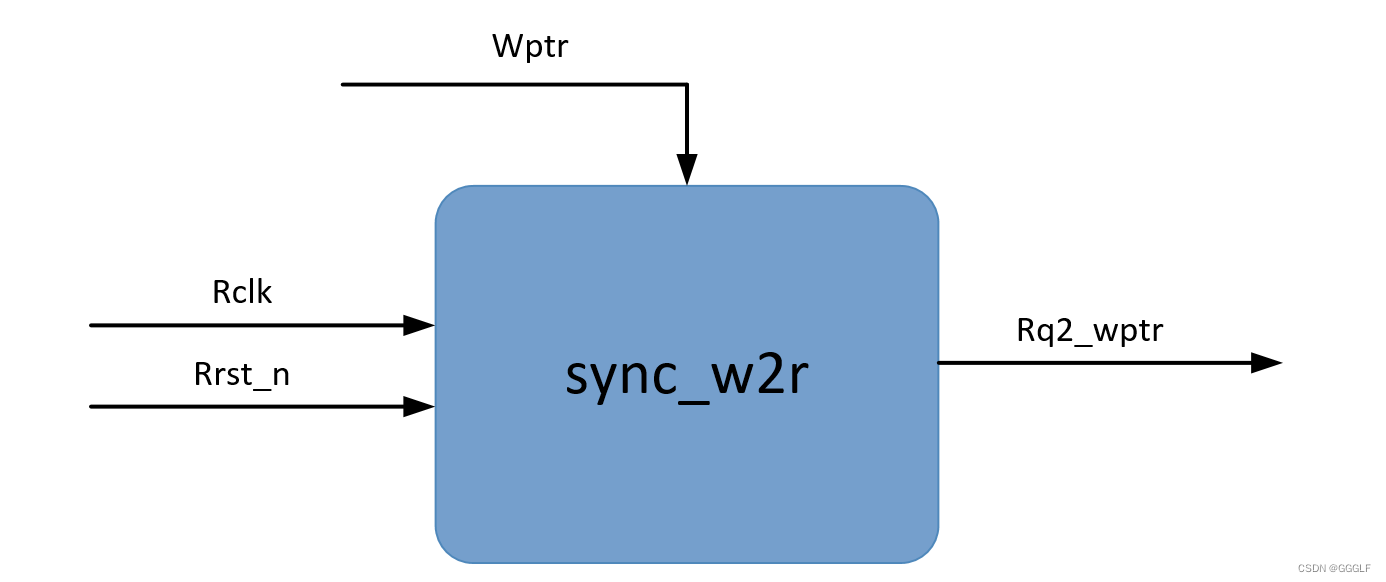
Verilog代码如下
module sync_w2r
#(parameter ADDRSIZE = 6)
(
output reg [ADDRSIZE:0] rq2_wptr, //将写指针同步到读指针
input [ADDRSIZE:0] wptr, //输入写指针
input rclk, rrst_n
);
reg [ADDRSIZE:0] rq1_wptr;
always @(posedge rclk or negedge rrst_n)
if (!rrst_n)begin
rq1_wptr <= 0;
rq2_wptr <= 0;
end
else begin
rq1_wptr <= wptr;
rq2_wptr <= rq1_wptr;
end
endmodule
exe应该在我打开页面时运行。异步进程需要运行。有什么方法可以在ruby中使用两个参数异步运行exe吗?我已经尝试过ruby命令-system()、exec()但它正在等待过程完成。我需要用参数启动exe,无需等待进程完成是否有任何rubygems会支持我的问题? 最佳答案 您可以使用Process.spawn和Process.wait2:pid=Process.spawn'your.exe','--option'#Later...pid,status=Process.wait2pid您的程序将作为解释器的子进程执行。除
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
遍历文件夹我们通常是使用递归进行操作,这种方式比较简单,也比较容易理解。本文为大家介绍另一种不使用递归的方式,由于没有使用递归,只用到了循环和集合,所以效率更高一些!一、使用递归遍历文件夹整体思路1、使用File封装初始目录,2、打印这个目录3、获取这个目录下所有的子文件和子目录的数组。4、遍历这个数组,取出每个File对象4-1、如果File是否是一个文件,打印4-2、否则就是一个目录,递归调用代码实现publicclassSearchFile{publicstaticvoidmain(String[]args){//初始目录Filedir=newFile("d:/Dev");Datebeg
通常,数组被实现为内存块,集合被实现为HashMap,有序集合被实现为跳跃列表。在Ruby中也是如此吗?我正在尝试从性能和内存占用方面评估Ruby中不同容器的使用情况 最佳答案 数组是Ruby核心库的一部分。每个Ruby实现都有自己的数组实现。Ruby语言规范只规定了Ruby数组的行为,并没有规定任何特定的实现策略。它甚至没有指定任何会强制或至少建议特定实现策略的性能约束。然而,大多数Rubyist对数组的性能特征有一些期望,这会迫使不符合它们的实现变得默默无闻,因为实际上没有人会使用它:插入、前置或追加以及删除元素的最坏情况步骤复
在我做的一些网络开发中,我有多个操作开始,比如对外部API的GET请求,我希望它们同时开始,因为一个不依赖另一个的结果。我希望事情能够在后台运行。我找到了concurrent-rubylibrary这似乎运作良好。通过将其混合到您创建的类中,该类的方法具有在后台线程上运行的异步版本。这导致我编写如下代码,其中FirstAsyncWorker和SecondAsyncWorker是我编写的类,我在其中混合了Concurrent::Async模块,并编写了一个名为“work”的方法来发送HTTP请求:defindexop1_result=FirstAsyncWorker.new.async.
在ruby中,你可以这样做:classThingpublicdeff1puts"f1"endprivatedeff2puts"f2"endpublicdeff3puts"f3"endprivatedeff4puts"f4"endend现在f1和f3是公共(public)的,f2和f4是私有(private)的。内部发生了什么,允许您调用一个类方法,然后更改方法定义?我怎样才能实现相同的功能(表面上是创建我自己的java之类的注释)例如...classThingfundeff1puts"hey"endnotfundeff2puts"hey"endendfun和notfun将更改以下函数定
我目前有一个reddit克隆类型的网站。我正在尝试根据我的用户之前喜欢的帖子推荐帖子。看起来K最近邻或k均值是执行此操作的最佳方法。我似乎无法理解如何实际实现它。我看过一些数学公式(例如k表示维基百科页面),但它们对我来说并没有真正意义。有人可以推荐一些伪代码,或者可以查看的地方,以便我更好地了解如何执行此操作吗? 最佳答案 K最近邻(又名KNN)是一种分类算法。基本上,您采用包含N个项目的训练组并对它们进行分类。如何对它们进行分类完全取决于您的数据,以及您认为该数据的重要分类特征是什么。在您的示例中,这可能是帖子类别、谁发布了该项