一、有缘蜂鸣器和无缘蜂鸣器
所谓的有源蜂鸣器是指蜂鸣器内部内置振荡电路,一通电就能响。但发生频率固定,音色单一;无源蜂鸣器内部不含振荡源,内部结构相当于电磁场扬声器,可以通过给他输出一定频率的信号才能发声。人耳能听到的频率范围在20Hz–20kHz之间,通过STM32的GPIO引脚快速切换高低电平输出就能实现无源蜂鸣器的发声,切换的频率不同,发出的音调就不一样。需要外部提供2~5khz左右的方波。
二、"哆瑞咪发…"的实现
每个音节都有不用的频率可以发出不同的声音
//Do Re Mi Fa So La Si
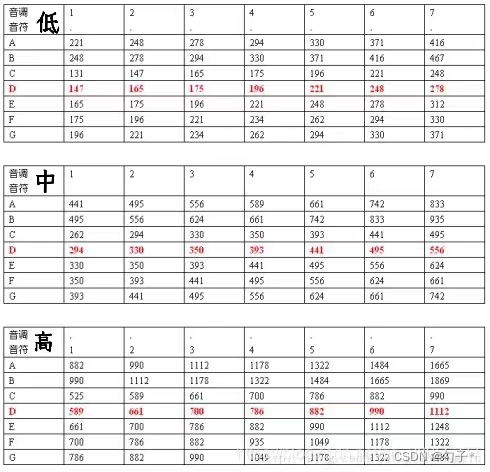
根据 f=72MHZ/[(arr+1)(psc+1)]公式(频率确定后,再通过寄存器TIMX->CCRY寄存器来确定通道Y的占空比。计数器向上计数时,当计数器的值比CCR寄存器值小时输出低电平,比它大时就输出高电平,高电平占总周期的时间就是占空比。)来实现发出不同的音调。
三、程序
1.timer.c
1.1//通用定时器3中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器3!
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
}
//定时器3中断服务程序
void TIM3_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
//LED1=!LED1;
}
}1.2//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
// TIM_OCInitStructure.TIM_Pulse=50;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
STM32单片机上有很多I/O口,也有很多的内置外设,这些内置外设基本都是与I/O口共用管脚的,也就是I/O管脚的复用功能。除了I/O管脚的复用功能外,很多复用内置的外设的I/O引脚可以通过重映射功能,即从不同的管脚引出,即复用功能的引脚和重映射的引脚是可通过软件配置改变的。
2.main.c
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "beep.h"
#include "timer.h"
int main(void)
{
int a[7]={19,34,14,13,24,21,18};//创建数组,arr
int i=0;
vu8 key=0;
delay_init(); //延时函数初始化
LED_Init(); //LED端口初始化
KEY_Init(); //初始化与按键连接的硬件接口
BEEP_Init(); //初始化蜂鸣器端口
while(1)
{
key=KEY_Scan(0); //得到键值
if(key)
{
switch(key)
{
case WKUP_PRES: //控制蜂鸣器
TIM3_PWM_Init(a[i],7199);
TIM_SetCompare2(TIM3,a[i]/2);
i++;
break;
}
}else delay_ms(10);
if(i==7)
{
i=0;
}
}
}//数组中使用的是C音调中音所求出
四、简单音乐
两只老虎简谱
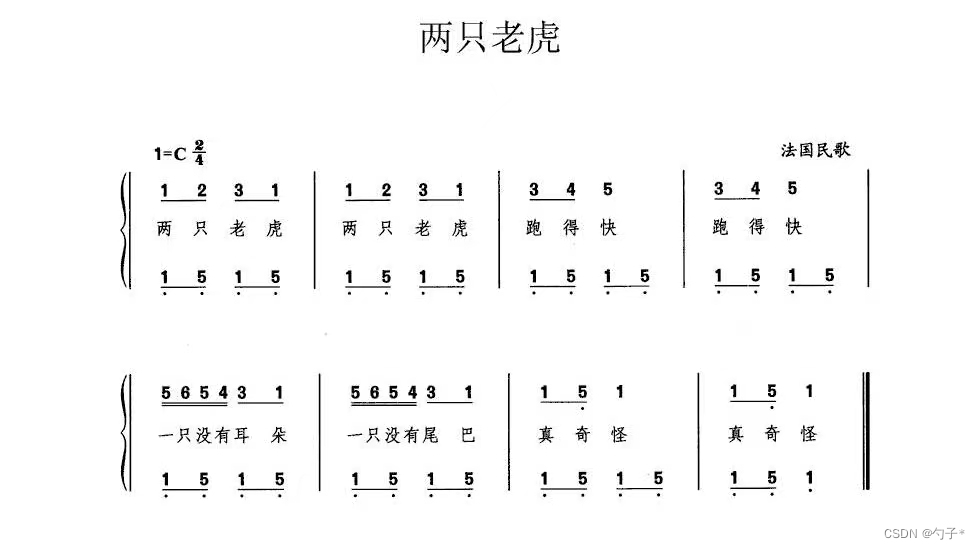
//2/4叫四二拍 以四分音符为一拍,每小节有2拍,叫做2/4拍,一小节里有两拍,所以这里假设一拍是1000ms,则一个数字就是125ms
1.main.c
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "beep.h"
#include "timer.h"
int main(void)
{
int a[32]={38,34,30,38,38,34,30,38,30,28,
25,30,28,25,25,22,25,28,30,38,
25,22,25,28,30,38,38,51,38,38,
51,38};//创建数组,f=72MHZ/[(arr+1)(psc+1)]求出的arr
int b[32]={500,500,500,500,500,500,500,500,500,500,
1000,500,500,1000,250,250,250,250,500,500,
250,250,250,250,500,500,500,500,1000,500,
500,1000};创建数组,每一节拍延时
int i=0;
int j=0;
delay_init(); //延时函数初始化
LED_Init(); //LED端口初始化
KEY_Init(); //初始化与按键连接的硬件接口
BEEP_Init(); //初始化蜂鸣器端口
while(1)
{
TIM3_PWM_Init(a[i],7199);
TIM_SetCompare2(TIM3,a[i]/2);
delay_ms(b[j]);
i++;
j++;
if(i==32&&j==32)
{
//i=0,j=0;
break;
}
delay_ms(10);
}
} 最后就完成了两只老虎的简单音乐,方法适用于简单的简谱(如小星星,蓝精灵等)。
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
是否可以在PyYAML或Ruby的Psych引擎中禁用创建anchor和引用(并有效地显式列出冗余数据)?也许我在网上搜索时遗漏了一些东西,但在Psych中似乎没有太多可用的选项,而且我也无法确定PyYAML是否允许这样做.基本原理是我必须序列化一些数据并将其以可读的形式传递给一个不是真正的技术同事进行手动验证。有些数据是多余的,但我需要以最明确的方式列出它们以提高可读性(anchor和引用是提高效率的好概念,但不是人类可读性)。Ruby和Python是我选择的工具,但如果有其他一些相当简单的方法来“展开”YAML文档,它可能就可以了。 最佳答案
LL库和HAL库简介LL:Low-Layer,底层库HAL:HardwareAbstractionLayer,硬件抽象层库LL库和hal库对比,很精简,这实际上是一个精简的库。LL库的配置选择如下:在STM32CUBEMX中,点击菜单的“ProjectManager”–>“AdvancedSettings”,在下面的界面中选择“AdvancedSettings”,然后在每个模块后面选择使用的库总结:1、如果使用的MCU是小容量的,那么STM32CubeLL将是最佳选择;2、如果结合可移植性和优化,使用STM32CubeHAL并使用特定的优化实现替换一些调用,可保持最大的可移植性。另外HAL和L
单击表单中的按钮将发送一个POST请求,由以下代码处理。post'/register'do#sendpostrequesttohttp://www.randomsite.com#parseresponse#dosomethingwithit@user=User.first(:name=>params['regUsername'])if@user==nil@user=User.create(:name=>params['regUsername'],:pass=>Password.create(params['regPassword']),:email=>params['regEmail'
我不知道我在这里做了什么,但我试图让Rails中的一个Controller将作业排队到Resque,然后工作人员连接到Resque并完成繁重的工作(即比较、数据库条目)。然而,任务甚至没有运行,因为没有关于设置Resque的明确说明。复制粘贴如下:AlsoavailableinGistformat!这是来自Hoptoad的异常行:NoMethodError:undefinedmethod'perform'forViolateq:Module这是“worker”文件的内容:moduleViolateq@queue=:violateqdefperform(nick,rulenumber)#
本文代码使用HAL库。文章目录前言一、MCP4017的重要特性二、MCP4017计算RBW阻值三、MCP4017地址四、MCP4017读写函数五、CubeMX创建工程(利用ADC测量MCP4017电压)、对应代码:总结前言一、MCP4017的重要特性蓝桥杯板子上的是MCP4017T-104ELT,如图1。MCP4017是一个可编程电阻,通过写入的数值可以改变电阻的大小。重点在于6引脚(W),5引脚(B&#
STM32OTA应用开发——通过USB实现OTA升级目录STM32OTA应用开发——通过USB实现OTA升级前言1环境搭建2功能描述3BootLoader的制作4APP的制作5烧录下载配置6运行测试结束语前言什么是OTA?百度百科:空中下载技术(Over-the-AirTechnology;OTA),是通过移动通信的空中接口实现对移动终端设备及SIM卡数据进行远程管理的技术。经过公网多年的应用与发展,已十分成熟,网络运营商通过OTA技术实现SIM卡远程管理,还能提供移动化的新业务下载功能。实际上,现在我们所说的OTA比百度百科的定义还要更广泛,OTA的形式已经不再局限于手机和SIM卡,只要涉及
文章目录1简介2绪论2.1课题背景与目的3系统设计详细设计描述3.2硬件部分温度测量电路其他电路部分3.3软件部分主程序子系统程序温湿度程序流程键盘显示子程序3.4实现效果3.5部分相关代码4最后1简介Hi,大家好,这里是丹成学长,今天向大家介绍一个单片机项目基于单片机的智能温控农业大棚系统大家可用于课程设计或毕业设计单片机-嵌入式毕设选题大全及项目分享:https://blog.csdn.net/m0_71572576/article/details/1254090522绪论2.1课题背景与目的近年来我国的温室控制取得了长足的进步,首先在温室群控制方面,进行了初步的探索和理论研究,其次在温室
解析数据 进入阿里云的IOTStdio,点击新建项目。 新建项目后点击新建Web应用。名称 应用名称随便填写 创建完成后我们进入应用。 在左侧组件处拖入一个指示灯和一个开关。 点击指示灯组件,点击配置数据源 选择我们的产品、数据、和属性。 我们还可以配置开和关的显示颜色。 点击按钮,配置交互动作。 选择设备和属性,设置值位置点击数据来源,选择组件值 配置完成后进入预览,点击按钮,在esp8266就会收到来自平台的json格式的数据,MCU端需要做的就是解析来自平台的数据,进而达到控制下