cam+imu传感器组合可以看作视觉惯导slam的一种组合方法,基于安卓平台大大简化用户的设备数量,在人人都有的安卓手机上也能进行实验。
本次实验采用的app:说明
该app集cam(视频流)+imu采集于一体,,离线采集,方便导入,适配华为手机效果较好。
安装完成后,开始记录record,结束stop。
该数据记录保存在本地的Android文件夹下,类似小米华为系列的手机需要打开开发者模式并进入USB调试才可以找到。为了方便,我们将文件直接将文件发送到电脑也好,找到一个不需要权限的文件夹放入也好,反正怎么简单怎么来~
发现本地文件:

是以一个采集时间来命名的文件,进入发现里面有许多数据,其中movie.mp4是视频流信息,gyro_accel.csv是imu的含有时间戳、加速度计和陀螺仪的数据,frame_timestamp.mp4是视频帧时间戳数据。其它目前用不到,涉及地磁、GPS等信息,也说明该app可以多数据源融合

打包目前有两种方法,一种是直接在ROS下打包,另一种是通过kalibr_bagcreater.py脚本来进行打包
本次采用Python脚本打包的方式,打包脚本程序kalibr_bagcreater
拷贝到Ubuntu下,试运行发现缺少一个叫utility_functions.py的第三方库,添加以后发现可以运行了。
库的地址: utility_functions.py
本地创建一个文件,起名dataset2,放入视频和imu的时间戳以及MP4
编译后会生成一个pyc文件,是生成的中间文件。记录一下输入参数的过程:
通过阅读kalibr_bagcreater.py代码,输入-h或–help后会显示帮助文档,按照提示输入参数。
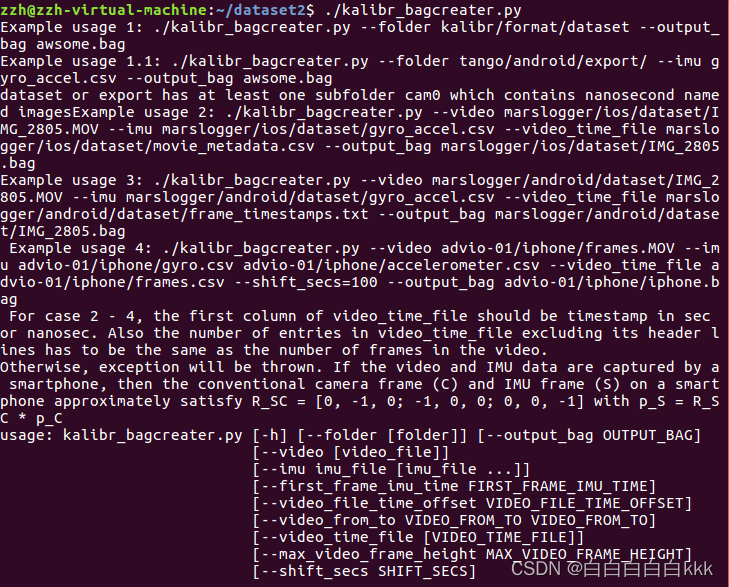
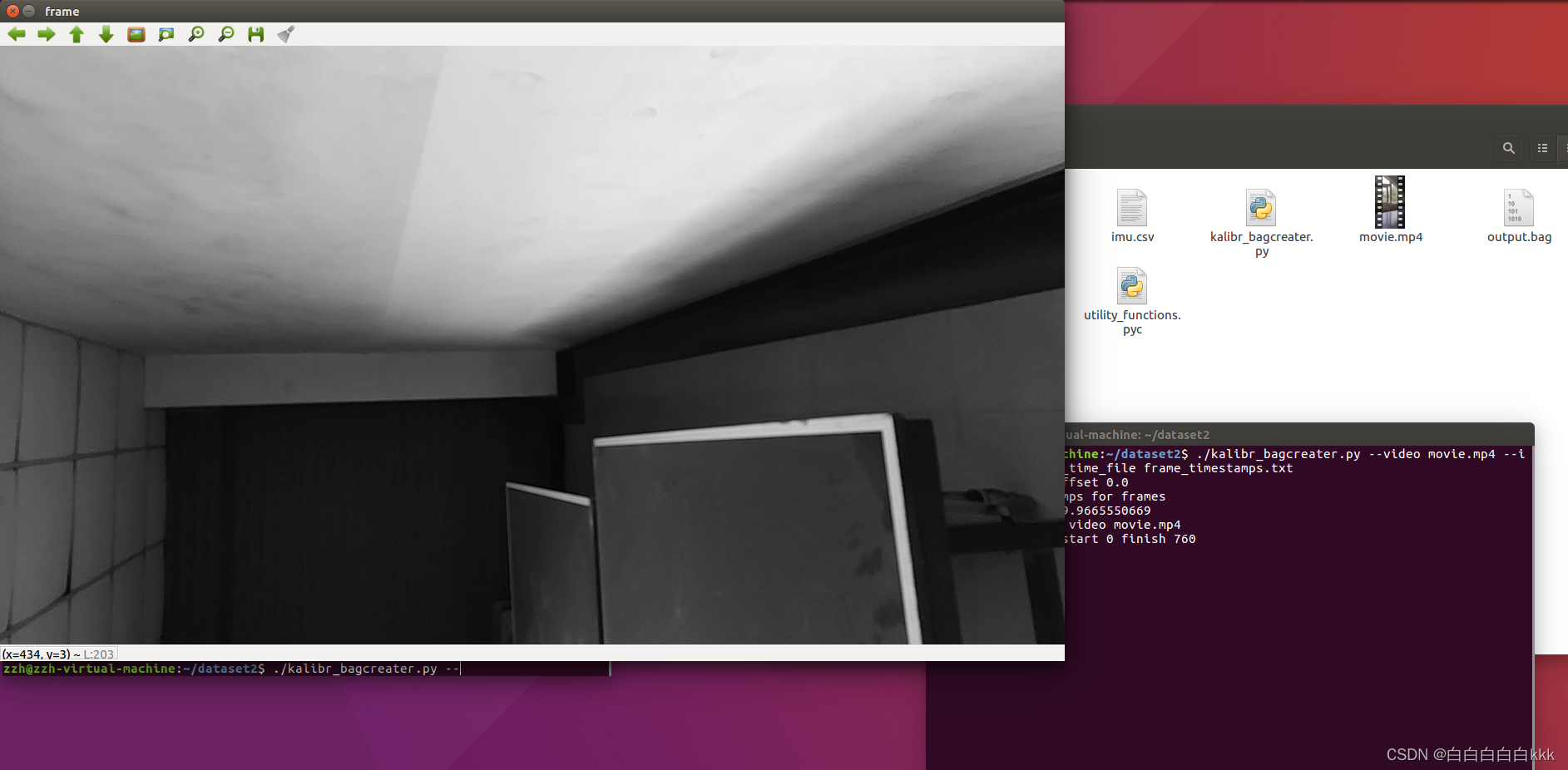
按照这样填入参数,运行!

出现打包的画面,说明正在录制。
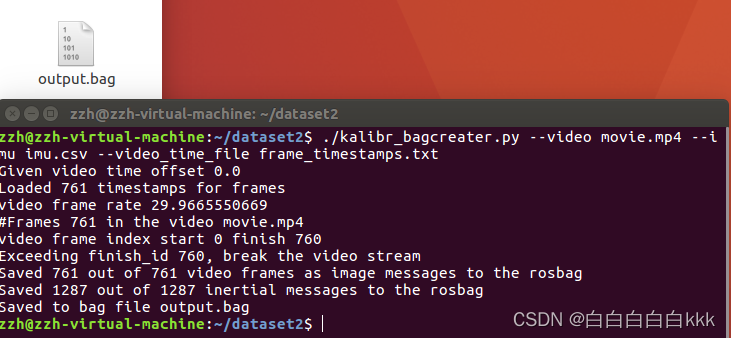
如果不填写保存位置的参数,得到的.bag文件也是自动保存到这个文件夹下,我们发现出现了一个output.bag的文件。
这样就打包完成了,接下来任务就是如何配置launch文件,设置yaml参数,让bag包在vins-mono下运行。
补充:
1.launch文件的作用是 启动多个节点,因为在ROS下许多命令都是一个个节点(node)组成的,这样可以简化流程启动。
2.yaml文件里包含了一些适应当前数据的参数配置。
第一次打包完成后,可以简单的在vins下跑一跑,看看有没有问题。在运行之前,要修改launch启动文件和yaml配置文件。
简单起见,就在本地文件夹vins-mono下添加修改即可。
1.修改yaml文件。
进入catkin_ws工作空间,找到存放代码的src文件夹,进入vins-mono,点击config。在config下新建一个名为android的文件夹,其中新建文件:
将隔壁的euroc下的euroc_config.yaml中的内容复制过来
因为还不知道相机和imu的内外参和imu的噪声,所以暂且只修改相机和imu的topics以及相机的分辨率信息。即
imu_topic: "/imu0"
image_topic: "/cam0/image_raw"
************
image_width: 1280
image_height: 720
注意:该文件就是最后的android参数配置文件,下面的各种参数是需要填写的,待到后面将cam和imu联合标定以后,会得到相关的参数!
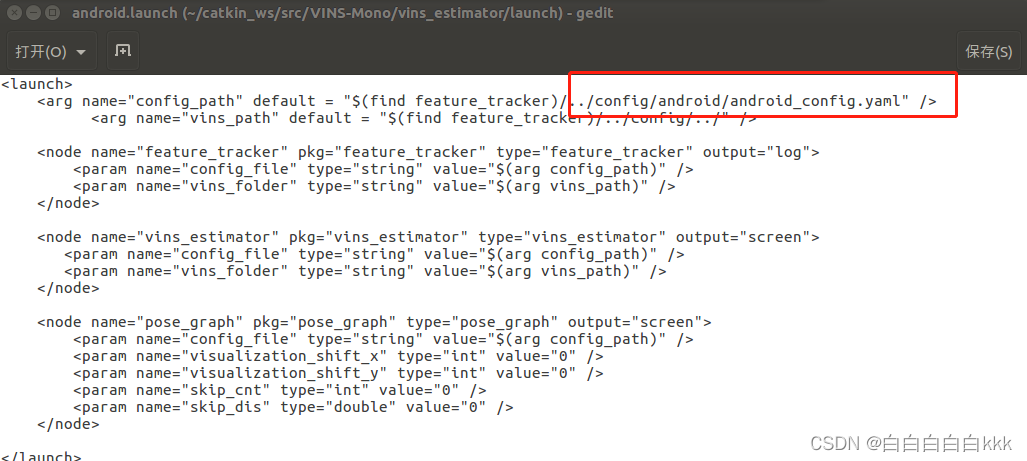
2.修改launch文件
launch文件相当于一个启动器,roslaunch以后,启动了android配置文件yaml。
增加launch文件,直接将/vins_mono/vins_estimator/launch文件夹下的euroc.launch文件,拷贝一份,重命名为android.launch,修改config_path变量(启动后直接去找android_config.yaml):
这里有一个玄学问题,待到后面roslaunch以后,经常会出现杀死进程的提示,不知道为啥,或许是虚拟机的问题。
以上两处配置好以后,可以保证在vins-mono下运行了
roscore
roslaunch vins_estimator android.launch
roslaunch vins_estimator vins_rviz.launch
rosbag play ~/catkin_ws/Dates/
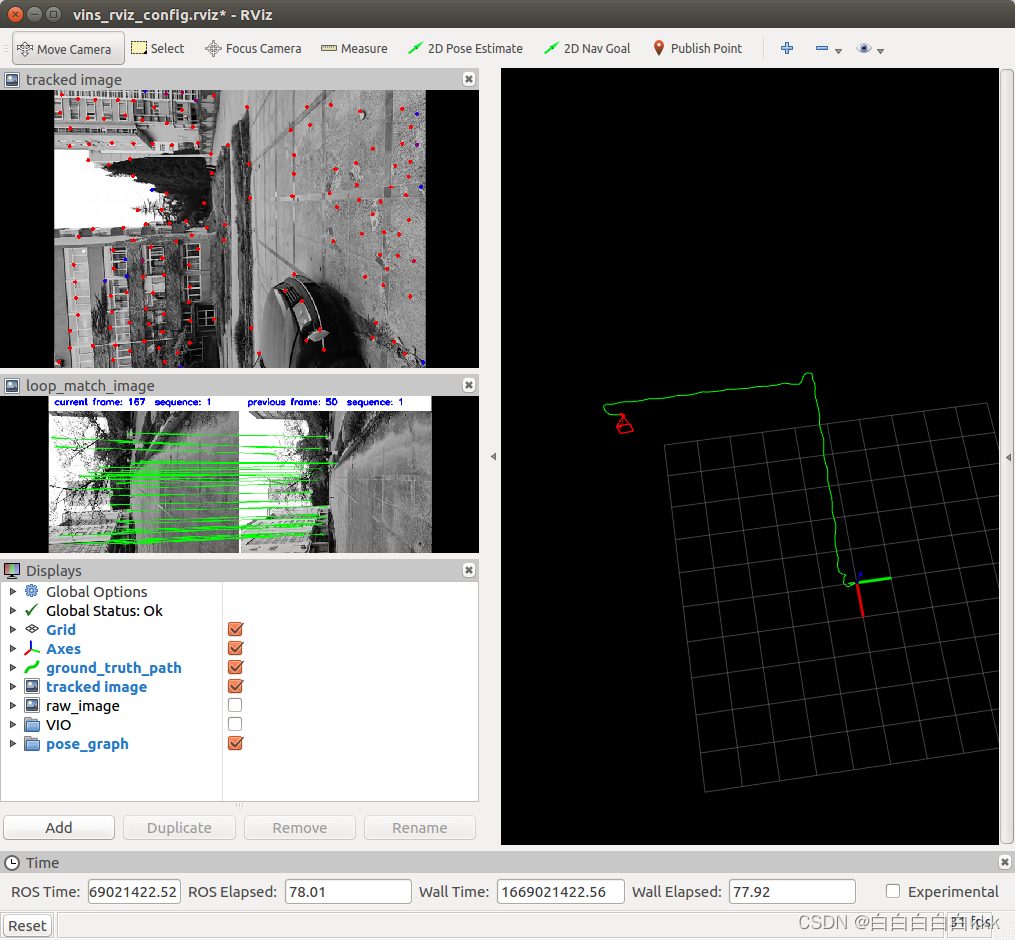
因为没有配置手机的cam+imu的内外参,所以直接飘了。
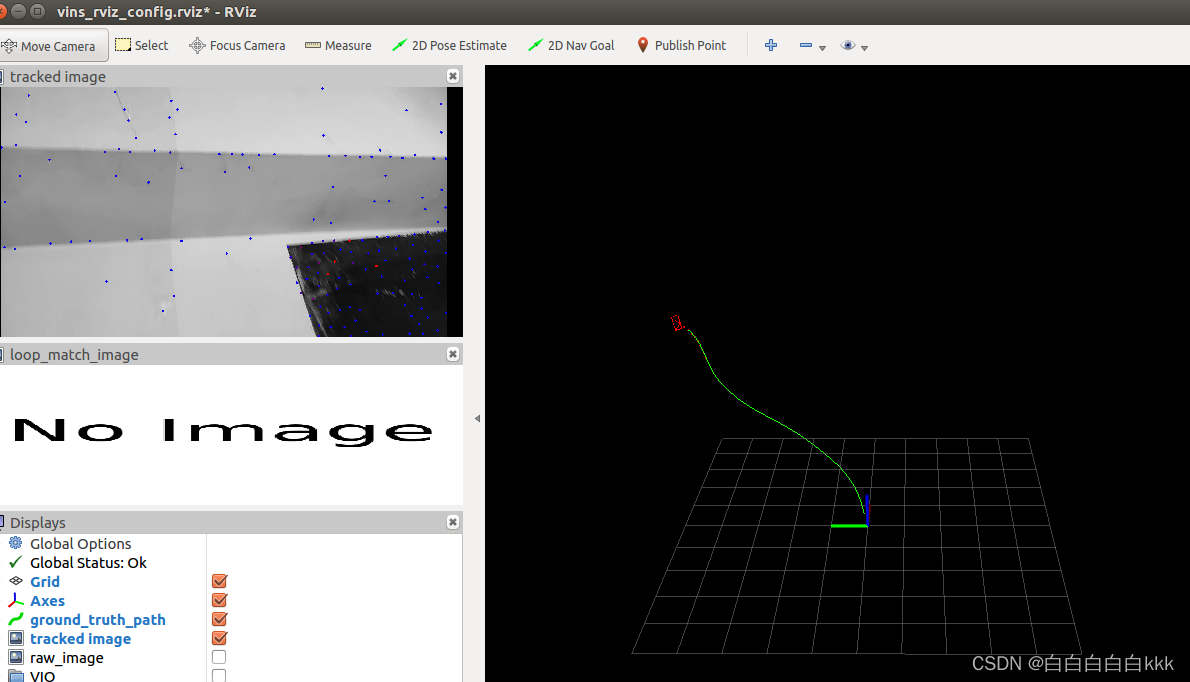
说明还需要后续的imu和cam的内外参配置。
标定部分包括相机的标定和imu的标定。
相机的标定用的是kalibr工具包。
源码安装工具箱:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install ros-kinetic-desktop python-rosinstall python-rosdep -y
rosdep init
rosdep update
其中的rosdep init 和rosdep update 出现问题,参考之前配置vins-mono时的解决方法即可,是可以解决的。
安装工具箱所需要的依赖库:
sudo apt-get install python-setuptools python-rosinstall ipython libeigen3-dev libboost-all-dev doxygen libopencv-dev ros-kinetic-vision-opencv ros-kinetic-image-transport-plugins ros-kinetic-cmake-modules python-software-properties software-properties-common libpoco-dev python-matplotlib python-scipy python-git python-pip ipython libtbb-dev libblas-dev liblapack-dev python-catkin-tools libv4l-dev
sudo apt-get update
sudo apt-get install python-igraph
sudo apt install python-pip (python2.7)
sudo pip install python-igraph
两种igraph的安装方式,推荐apt-get安装。pip因为版本问题太过于复杂。
igraph的两种安装方式
创立工作空间:
mkdir -p ~/kalibr_workspace/src
cd ~/kalibr_workspace
source /opt/ros/kinetic/setup.bash
catkin init
catkin config --extend /opt/ros/kinetic
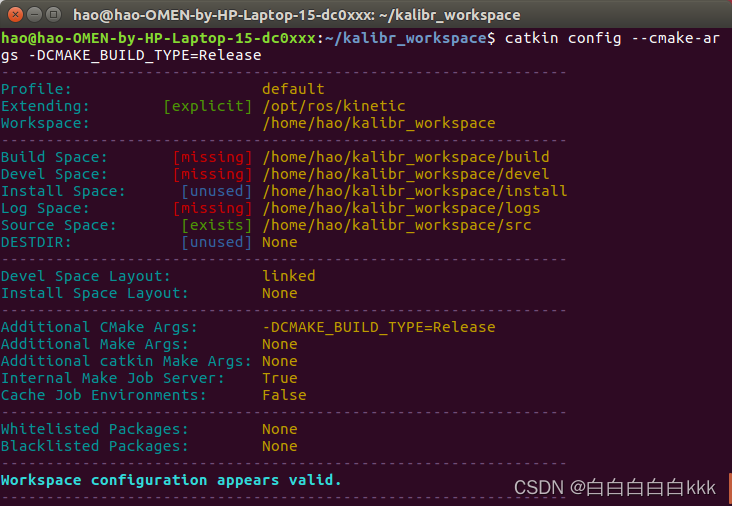
catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release
其中第二步创建好工作空间以后,source以后的catkin init可能出现catkin未找到命令这一错误提示,我们需要安装catkin tools工具
sudo apt-get update
sudo apt-get install python-catkin-tools
catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release后显示:
下载kalibr源码并编译:
cd ~/kalibr_workspace/src
git clone https://gitclone.com/github.com/ethz-asl/Kalibr.git
cd ~/kalibr_workspace
catkin build -DCMAKE_BUILD_TYPE=Release -j4
安装完成!
接下来是对相机进行标定。准备一个打包好的包含标定板图像的output.bag以及标定板的配置文件.yaml,将其放到创建好的kalibr_workspace中,命名为test1,进入文件夹:
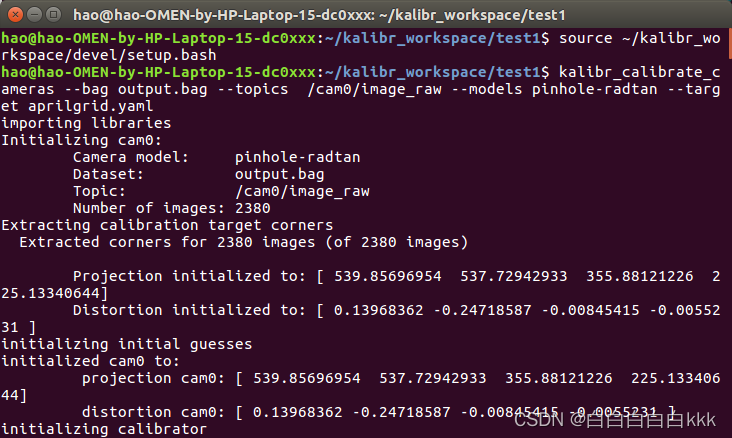
source ~/kalibr_workspace/devel/setup.bash
kalibr_calibrate_cameras --bag output.bag --topics /cam0/image_raw --models pinhole-radtan --target aprilgrid.yaml
等待标定~
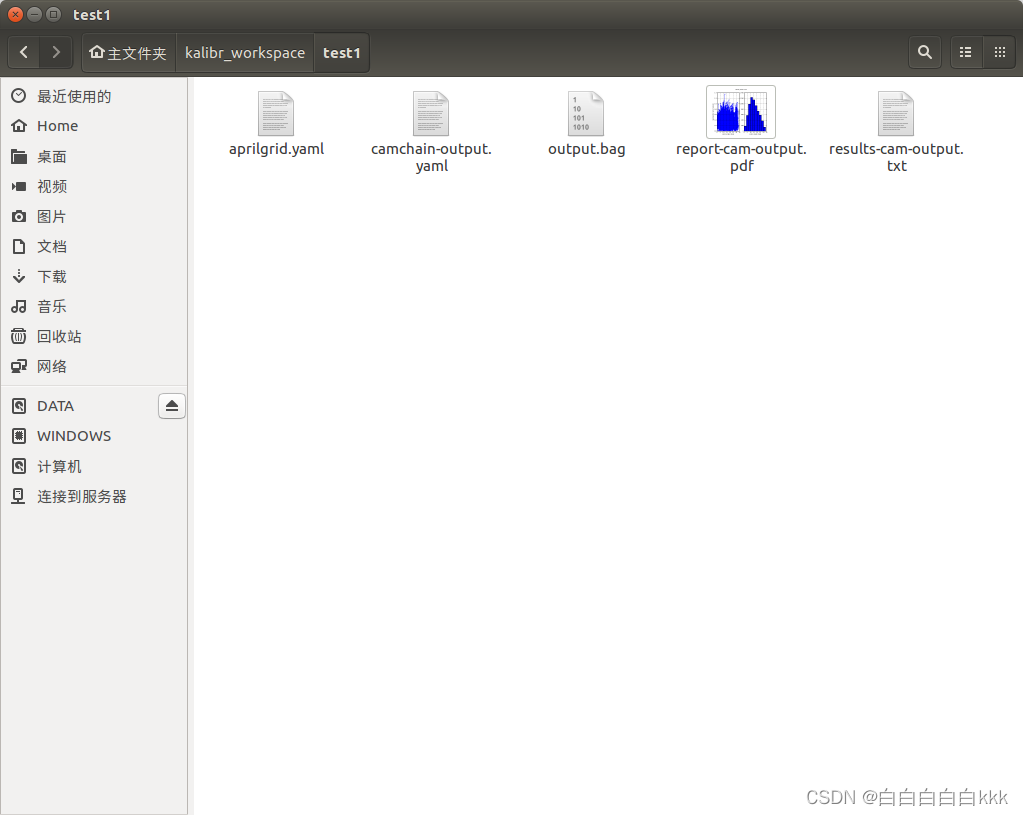
 这样就是标定成功了,同时你的文件夹下会出现相机的标定参数和一个标定精度的pdf:
这样就是标定成功了,同时你的文件夹下会出现相机的标定参数和一个标定精度的pdf:
 此处表示的是标定情况,越聚集效果越好,最好不超过1.0这个范围。
此处表示的是标定情况,越聚集效果越好,最好不超过1.0这个范围。
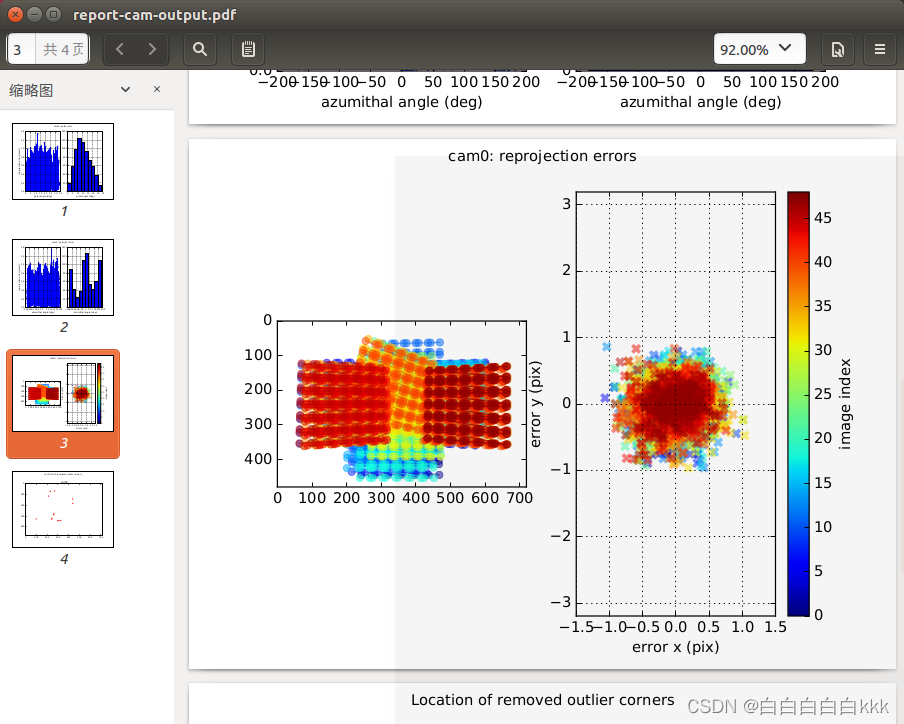
将手机静止1-2h,手机越新、越贵,标定的效果越好。时间越久越好,oled屏幕注意烧屏。
为了简单方便,我们用imu_utils来标定imu,在安装编译之前,首先需要明确的是,code_imu依赖全局ceres库,其次是不能对code_imu 和imu_utils同时编译,imu_utils依赖code_imu。
1.安装依赖项:
sudo apt-get install libdw-dev
2.编译:
imu_utils下载地址为:https://github.com/gaowenliang/imu_utils
code_utils下载地址为:https://github.com/gaowenliang/code_utils
下载后解压,此时注意先后顺序!
先把code_utils放在工作空间catkin_ws的src下面,然后编译。
cd catkin_ws
catkin_make
此时出现报错
/home/hao/catkin_ws/src/code_utils-master/src/sumpixel_test.cpp:2:24: fatal error: backward.hpp:No such file or directory
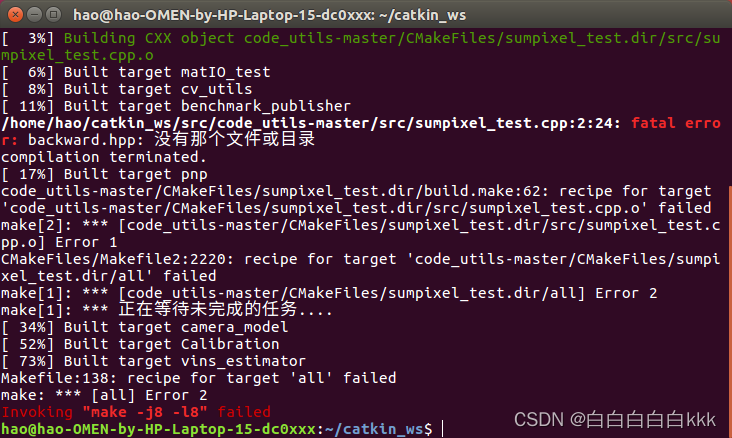
解决方法:
在code_utils下面的src中找到sumpixel_test.cpp,修改#include "backward.hpp"为 #include “code_utils/backward.hpp”,再编译。注意英文标点符号。
编译成功以后,再把imu_utils放到工作空间catkin_ws的src下面,进行编译。
cd catkin_ws
catkin_make
编译成功!下面是测试对imu的标定情况。
1.打包imu.bag:
将手机静置至少2h(>120分钟)。同上文第二步一样,将采集的数据保存到电脑中,进行打包。kalibr制包器也是可以将单一的imu数据打包成rosbag的,不过需要对代码进修小的改动。
在kalibr_bagcreater.py中,第569行的代码:
else:
raise Exception('Invalid/Empty video file and image folder')
换成pass,跳过这一提示没有image的else,这样就不会提示,正常打包。:
else:
pass
2.在imu_utils/launch文件夹下,创建一个新的android.launch文件。
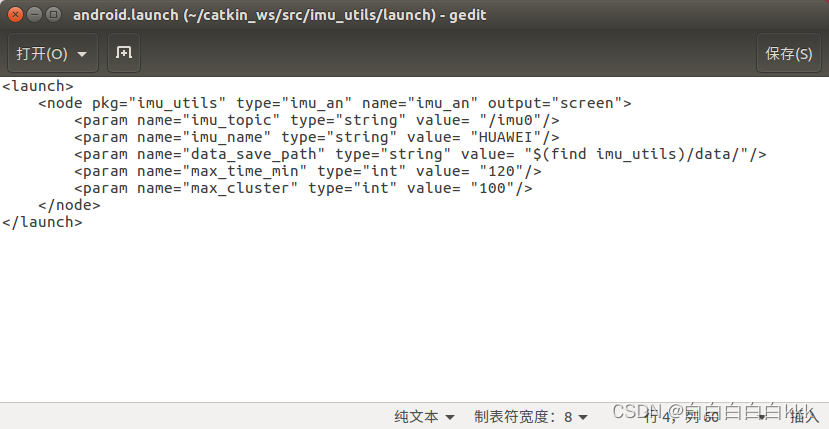
需要说明的是,max_time_min这一行,最后的数值表示的是记录最长时间,若是采集的数据时长超过这一时间,则会出现错误,需要注意!
3.标定imu:
roslaunch imu_utils android.launch
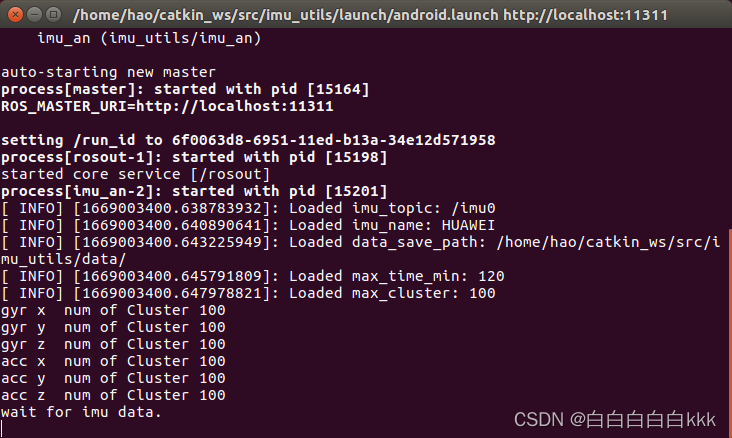
可以看出系统正在等待imu的数据,接下来是对imu.bag进行play bag。
找到包的位置或者写明包的位置,-r 200的意思是200倍的速度进行播放,否则数据太多,要进行很长时间。-s 10的意思是从第十秒开始play,这样可以避免一开始手机的不平稳引起的误差。
rosbag play -r 200 output.bag
rosbag play -r 200 output.bag -s 10
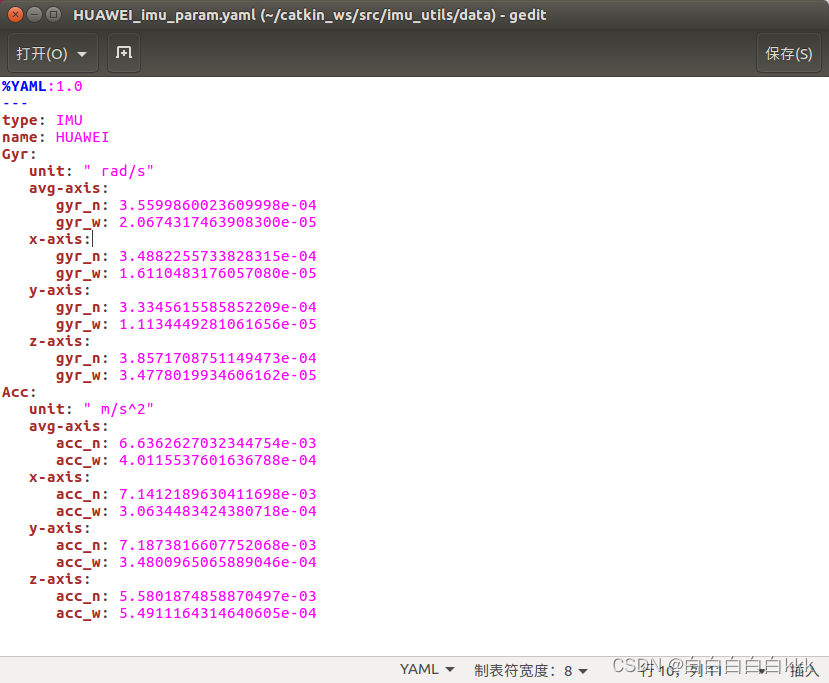
记录结束以后,ctrl+c进行中断,可以在本地的imu-utils/data文件中找到HUAWEI_imu_param.yaml。这其中的数据 是作为以后cam+imu联合标定时的重要参数。
联合标定也是在kalibr工具箱中的功能,相关指令:
source ~/kalibr_workspace/devel/setup.bash
kalibr_calibrate_imu_camera --target aprilgrid.yaml --cam camchain.yaml --imu imu.yaml --bag cam_imu.bag
根据参数来准备需要的配置文件:
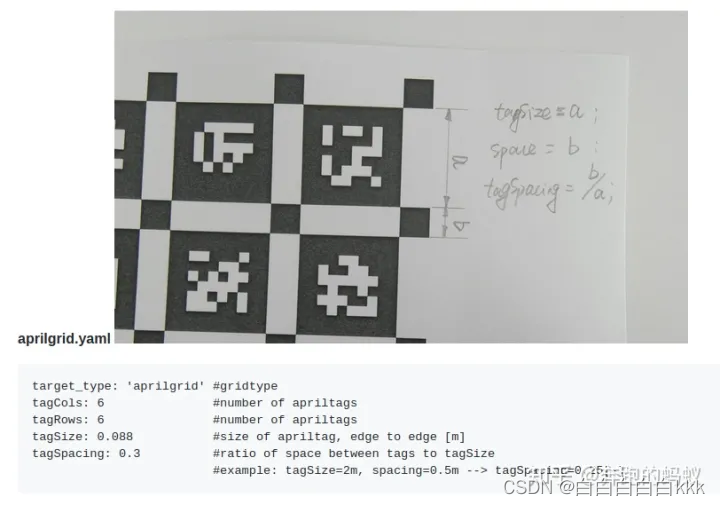
aprilgrid.yaml文件是标定板的相关配置文件。其中:
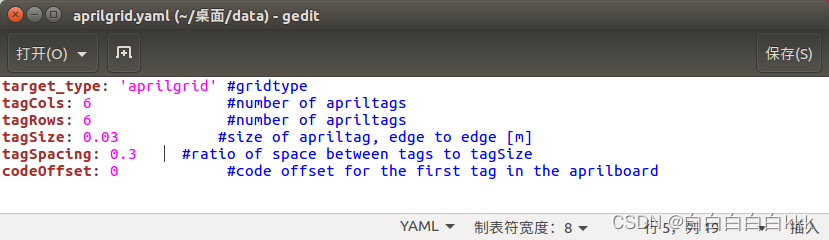
tagsize:是大正方形的边长。下面是官方样图。
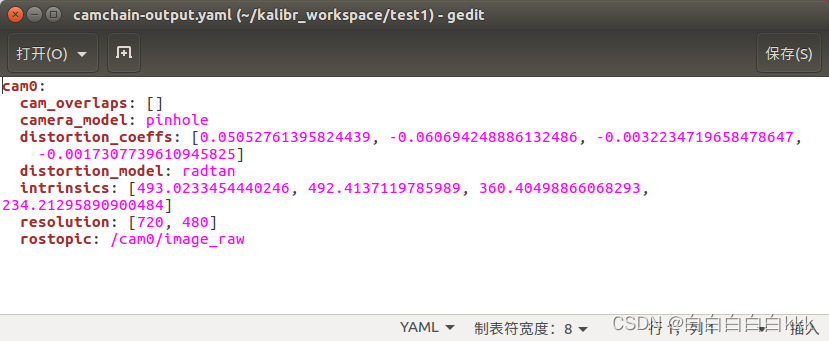
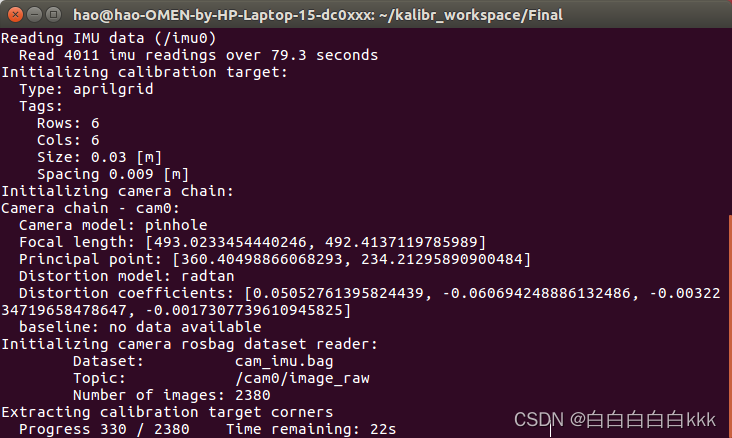
camchain.yaml文件是对cam单独标定所得到的。其中的相机模型、畸变参数、畸变模型、相机内参和分辨率如图:
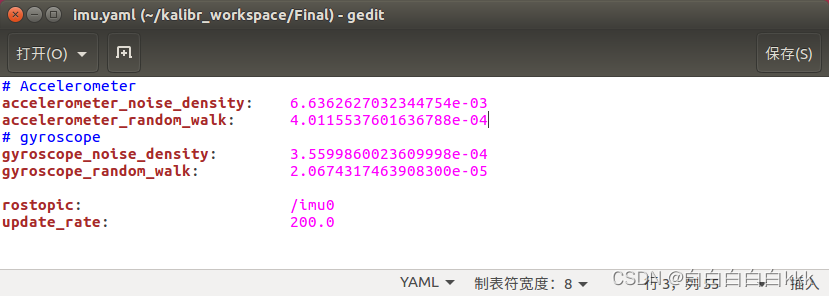
imu.yaml文件是imu的配置文件。由之前标定的imu数据得到:
cam+imu.bag是包含了各种不同位姿的image和不同方向角度与速度,全方位激活了加速度计、陀螺仪的信息源的rosbag格式。
运行上述指令。
结束后会生成很多文件。kalibr很贴心的生成一个pdf,可以形象的查看标定的效果。

至此,标定部分完成!
将上述所有cam和imu相关内参和外参,写入vins-mono的config文件中,进行测试。
%YAML:1.0
#common parameters
imu_topic: "/imu0"
image_topic: "/cam0/image_raw"
output_path: "/home/zzh/output/"
#camera calibration
model_type: PINHOLE
camera_name: camera
image_width: 640
image_height: 480
distortion_parameters:
k1: 0.03950348224657654
k2: -0.06749775883363018
p1: -0.00592411550206494
p2: -0.0010599949132722051
projection_parameters:
fx: 425.14538096051245
fy: 425.2848488603618
cx: 321.238440081968
cy: 221.10305101769163
# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: 0 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.
# 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess.
# 2 Don't know anything about extrinsic parameters. You don't need to give R,T. We will try to calibrate it. Do some rotation movement at beginning.
#If you choose 0 or 1, you should write down the following matrix.
#Rotation from camera frame to imu frame, imu^R_cam
extrinsicRotation: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [-0.00059191, -0.99966752, 0.02577778,
-0.99999327, 0.00068502, 0.00360354,
-0.00362, -0.02577547, -0.9996612]
#Translation from camera frame to imu frame, imu^T_cam
extrinsicTranslation: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [-0.00003843, -0.00006284, 0.00002028]
#feature traker paprameters
max_cnt: 150 # max feature number in feature tracking
min_dist: 25 # min distance between two features
freq: 10 # frequence (Hz) of publish tracking result. At least 10Hz for good estimation. If set 0, the frequence will be same as raw image
F_threshold: 1.0 # ransac threshold (pixel)
show_track: 1 # publish tracking image as topic
equalize: 1 # if image is too dark or light, trun on equalize to find enough features
fisheye: 0 # if using fisheye, trun on it. A circle mask will be loaded to remove edge noisy points
#optimization parameters
max_solver_time: 0.04 # max solver itration time (ms), to guarantee real time
max_num_iterations: 8 # max solver itrations, to guarantee real time
keyframe_parallax: 10.0 # keyframe selection threshold (pixel)
#imu parameters The more accurate parameters you provide, the better performance
acc_n: 16.0e-2 # accelerometer measurement noise standard deviation. #0.2 0.04
gyr_n: 24.0e-3 # gyroscope measurement noise standard deviation. #0.05 0.004
acc_w: 5.5e-4 # accelerometer bias random work noise standard deviation. #0.02
gyr_w: 2.0e-4 # gyroscope bias random work noise standard deviation. #4.0e-5
g_norm: 9.80521281 # gravity magnitude
#loop closure parameters
loop_closure: 1 # start loop closure
load_previous_pose_graph: 0 # load and reuse previous pose graph; load from 'pose_graph_save_path'
fast_relocalization: 0 # useful in real-time and large project
pose_graph_save_path: "/home/zzh/output/pose_graph/" # save and load path
#unsynchronization parameters
estimate_td: 0 # online estimate time offset between camera and imu
td: -0.0199 # initial value of time offset. unit: s. readed image clock + td = real image clock (IMU clock)
#rolling shutter parameters
rolling_shutter: 0 # 0: global shutter camera, 1: rolling shutter camera
rolling_shutter_tr: 0.033 # unit: s. rolling shutter read out time per frame (from data sheet).
#visualization parameters
save_image: 1 # save image in pose graph for visualization prupose; you can close this function by setting 0
visualize_imu_forward: 0 # output imu forward propogation to achieve low latency and high frequence results
visualize_camera_size: 0.4 # size of camera marker in RVIZ
注意:
1.在配置文件的时候,标定cam时采集的视频分辨率和后面跑自采数据的分辨率要相同。否则会发生错误。
2.在配置imu 参数这一部分,直接采用官方给到的公制参数,效果要远远好于自己标定的部分。可以根据自己的经验进行微调。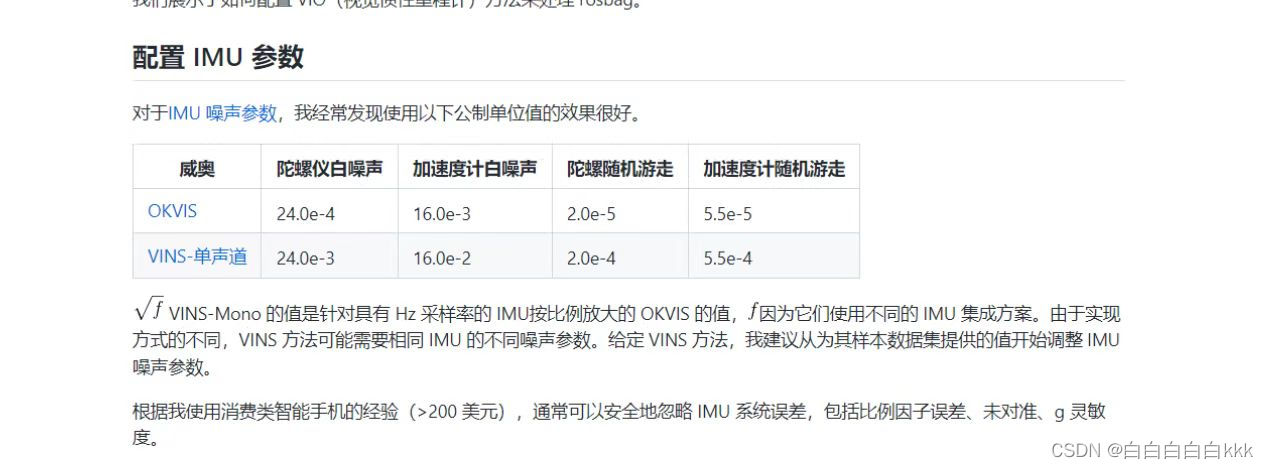
学习过程中的参考链接:
手机上的SLAM(5):rosbag打包image+imu
手机上的SLAM(6):ubuntu+ros自采数据开源方案适配(vins-mono)
手机上的SLAM(7):Kalibr相机+IMU离线标定
用imu_utils标定IMU,之后用于kalibr中相机和IMU的联合标定
官方介绍
很好奇,就使用rubyonrails自动化单元测试而言,你们正在做什么?您是否创建了一个脚本来在cron中运行rake作业并将结果邮寄给您?git中的预提交Hook?只是手动调用?我完全理解测试,但想知道在错误发生之前捕获错误的最佳实践是什么。让我们理所当然地认为测试本身是完美无缺的,并且可以正常工作。下一步是什么以确保他们在正确的时间将可能有害的结果传达给您? 最佳答案 不确定您到底想听什么,但是有几个级别的自动代码库控制:在处理某项功能时,您可以使用类似autotest的内容获得关于哪些有效,哪些无效的即时反馈。要确保您的提
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
我正在编写一个包含C扩展的gem。通常当我写一个gem时,我会遵循TDD的过程,我会写一个失败的规范,然后处理代码直到它通过,等等......在“ext/mygem/mygem.c”中我的C扩展和在gemspec的“扩展”中配置的有效extconf.rb,如何运行我的规范并仍然加载我的C扩展?当我更改C代码时,我需要采取哪些步骤来重新编译代码?这可能是个愚蠢的问题,但是从我的gem的开发源代码树中输入“bundleinstall”不会构建任何native扩展。当我手动运行rubyext/mygem/extconf.rb时,我确实得到了一个Makefile(在整个项目的根目录中),然后当
我有一个围绕一些对象的包装类,我想将这些对象用作散列中的键。包装对象和解包装对象应映射到相同的键。一个简单的例子是这样的:classAattr_reader:xdefinitialize(inner)@inner=innerenddefx;@inner.x;enddef==(other)@inner.x==other.xendenda=A.new(o)#oisjustanyobjectthatallowso.xb=A.new(o)h={a=>5}ph[a]#5ph[b]#nil,shouldbe5ph[o]#nil,shouldbe5我试过==、===、eq?并散列所有无济于事。
我有一些Ruby代码,如下所示:Something.createdo|x|x.foo=barend我想编写一个测试,它使用double代替block参数x,这样我就可以调用:x_double.should_receive(:foo).with("whatever").这可能吗? 最佳答案 specify'something'dox=doublex.should_receive(:foo=).with("whatever")Something.should_receive(:create).and_yield(x)#callthere
Sinatra新手;我正在运行一些rspec测试,但在日志中收到了一堆不需要的噪音。如何消除日志中过多的噪音?我仔细检查了环境是否设置为:test,这意味着记录器级别应设置为WARN而不是DEBUG。spec_helper:require"./app"require"sinatra"require"rspec"require"rack/test"require"database_cleaner"require"factory_girl"set:environment,:testFactoryGirl.definition_file_paths=%w{./factories./test/
我遵循MichaelHartl的“RubyonRails教程:学习Web开发”,并创建了检查用户名和电子邮件长度有效性的测试(名称最多50个字符,电子邮件最多255个字符)。test/helpers/application_helper_test.rb的内容是:require'test_helper'classApplicationHelperTest在运行bundleexecraketest时,所有测试都通过了,但我看到以下消息在最后被标记为错误:ERROR["test_full_title_helper",ApplicationHelperTest,1.820016791]test
我已经构建了一些serverspec代码来在多个主机上运行一组测试。问题是当任何测试失败时,测试会在当前主机停止。即使测试失败,我也希望它继续在所有主机上运行。Rakefile:namespace:specdotask:all=>hosts.map{|h|'spec:'+h.split('.')[0]}hosts.eachdo|host|begindesc"Runserverspecto#{host}"RSpec::Core::RakeTask.new(host)do|t|ENV['TARGET_HOST']=hostt.pattern="spec/cfengine3/*_spec.r
我在app/helpers/sessions_helper.rb中有一个帮助程序文件,其中包含一个方法my_preference,它返回当前登录用户的首选项。我想在集成测试中访问该方法。例如,这样我就可以在测试中使用getuser_path(my_preference)。在其他帖子中,我读到这可以通过在测试文件中包含requiresessions_helper来实现,但我仍然收到错误NameError:undefinedlocalvariableormethod'my_preference'.我做错了什么?require'test_helper'require'sessions_hel
有时我需要处理键/值数据。我不喜欢使用数组,因为它们在大小上没有限制(很容易不小心添加超过2个项目,而且您最终需要稍后验证大小)。此外,0和1的索引变成了魔数(MagicNumber),并且在传达含义方面做得很差(“当我说0时,我的意思是head...”)。散列也不合适,因为可能会不小心添加额外的条目。我写了下面的类来解决这个问题:classPairattr_accessor:head,:taildefinitialize(h,t)@head,@tail=h,tendend它工作得很好并且解决了问题,但我很想知道:Ruby标准库是否已经带有这样一个类? 最佳