文章目录
作为一种现代装备,雷达一直是一种重要的仿真对象,不论是各种雷达方程、资源调度、交接预报,以及结合弹道导弹目标的探测,结合预警卫星或置于大的探测体系中的分析都屡见不鲜。但可视化相关研究较少,多是作为某研究的附属出现。
可视化相关技术主要可分为5类:
①雷达模拟器。直接模拟雷达屏幕,根据雷达功能和目标特性,动态仿真雷达屏幕显示效果,可用于模拟训练等场合,如文献[1]采用软件实现了雷达模拟器,仿真雷达显示及参数设置与控制。
②示意性可视化。表现雷达作用的过程信息,作为态势的有机组成部分,如文献[2]设计了电磁特效对策类别、样式、颜色和参数,给出了几种典型的电磁对抗行动的显示效果。此项技术虽然简单,但是意义很重大,类似于标准、标号设计,如果得到认证和推广,会发挥比较大的作用。
③雷达威力切片可视化。这个概念未必合适,主要指2种情况:一是雷达天线方向图,对雷达系统仿真而言,雷达天线仿真是基础,如文献[3]进行了雷达天线方向图的建模,并给出了可视化结果;二是垂直面内雷达威力,以可视化方式展示某方位的雷达探测范围,如文献[4]采用C语言编程,绘制了垂直方向探测范围。
④雷达威力三维可视化。其实质是2个问题,探测威力数据如何生成、采取何种技术进行可视化。
文献[4]-[8]的探测范围数据生成技术基本类似,都是从雷达距离方程出发,考虑干扰等各种因素,生成表示探测范围的边界采样数据,然后进行绘制。文献[4]年代较为久远,绘制还较为简单;文献[5]采用三角形带绘制,未提及采用的具体平台;文献[6]、[7]出自同一团队,都是采用利用STK,将生成的威力数据作为数据文件导入的方式进行绘制;文献[8]则利用Direct3D进行绘制。
文献[3]和文献[9]在威力数据生成上的方法比较类似,都是采用离散化然后传递或跟踪的方法来计算边界。文献[3]采用OpenGL进行绘制。
此外,文献[10]在计算威力数据时考虑了地形的影响,文献[8]则将雷达探测范围可视化置于一个大的态势系统中实现。
⑤二维地图雷达威力可视化。虽然三维日益普及,但二维态势仍有其存在的价值,在二维地图上显示雷达探测范围也有其固有的应用领域,也有需要解决的技术细节。
采用OSGEarth开发平台,雷达探测范围是已经计算出来的结果,其表达形式定义如下。
class RadarRange{
cartesianFrame _frame; //坐标系
double _minRange; //最小作用距离,单位为m,
double _maxRange; //最大作用距离,单位为m
double _minAzimuthAngle; //方位角,与x轴夹角,单位是度,由-180°~180°
double _maxAzimuthAngle;
double _minElevetionAngle; //仰角,0°-90°
double _maxElevetionAngle;}
显然,这样的定义方式并不足以描述干扰、地形等各种影响,但对于并非装备级的仿真和态势系统来说,是可以的。
cartesianFrame用于表达坐标系,采用原点和三个坐标轴表示。
class cartesianFrame{
private:
CVector3D _origin;
CVector3D _xAxis;
CVector3D _yAxis;
CVector3D _zAxis;};
给定经纬度和高程,生成该位置的雷达直角坐标系如下
void cartesianFrame::initENUFrame(double B, double L, double H){
double sb = B * PI / 180.0;
double sl = L * PI / 180.0;
_yAxis.x = -sin(sb)*cos(sl);
_yAxis.y = -sin(sb)*sin(sl);
_yAxis.z = cos(sb);
_yAxis.SetUnit();
_xAxis.x = -sin(sl);
_xAxis.y = cos(sl);
_xAxis.z = 0.0;
_xAxis.SetUnit();
_zAxis.x = cos(sb)*cos(sl);
_zAxis.y = cos(sb)*sin(sl);
_zAxis.z = sin(sb);
_zAxis.SetUnit();
LB2DD(B, L, H, _origin.x, _origin.y, _origin.z);
根据上述定义可知,雷达探测范围在垂直方向的二维图如下

为了绘制雷达探测范围,生成离散的采样点,然后构造几何图元即可。
根据上述形状,显然,可以生成前、后两个曲面上的离散点,顶面、底面和侧面则可以直接利用曲面的边界上点绘制。
采用的方法是在方位、俯仰两个方向上,每隔1度生成一个采样点。
osg::ref_ptr<osg::Vec3Array> va = dynamic_cast<osg::Vec3Array*>(_radarGeometry->getVertexArray());
va->resize(_xDim*_yDim * 2+2);
for (int i = 0; i < _yDim; i++){
for (int j = 0; j < _xDim; j++){
double xa = (_radarWorkingMode->_minAzimuthAngle + xDelta * j) ;
double ya = (_radarWorkingMode->_minElevetionAngle + yDelta * i) ;
CPoint3D v2 = _radarWorkingMode->_frame.getGloballCoordFromAzElRa(xa, ya, _radarWorkingMode->_minRange);
(*va)[i*_xDim + j] = osg::Vec3d(v2.x, v2.y, v2.z);
v2 = _radarWorkingMode->_frame.getGloballCoordFromAzElRa(xa, ya, _radarWorkingMode->_maxRange * scale);
(*va)[i*_xDim + j + _xDim * _yDim] = osg::Vec3d(v2.x, v2.y, v2.z);}}
(*va)[_xDim*_yDim * 2+1] = osg::Vec3d(0, 0, 0);
其中,根据方位角、俯仰角和距离生成雷达坐标系中点矢量的代码如下
CPoint3D cartesianFrame::getGloballCoordFromAzElRa(double az, double el,double ra){
double cosAz = cos(az*PI / 180.0);
double sinAz = sin(az*PI / 180.0);
double cosEl = cos(el*PI / 180.0);
double sinEl = sin(el*PI / 180.0);
double y = ra * cosEl*cosAz;
double x = ra * cosEl * sinAz;
double z = ra * sinEl;
CPoint3D pos = _origin + _xAxis * x + _yAxis * y + _zAxis * z;
return pos;}
近曲面和远曲面的数据分别存储,最后存储的数据用于图元重启。

生成的数据是类似于上图中的离散网格点,为了表现雷达探测范围,采用索引形式构造图元,同时需要使用图元重启技术。
osg::ref_ptr<osg::DrawElementsUShort> _radarPlaneElements;
osg::ref_ptr<osg::DrawElementsUShort> _radarLineElements;
osg::ref_ptr<osg::DrawElementsUShort> _radarLineStripeElements;
osg::ref_ptr<osg::Geometry> _radarGeometry;
采用了三个图元,radarPlaneElements以具有半透明效果的面表示雷达范围。
radarLineElements和radarLineStripeElements是用于表示雷达范围的网格线,用于增强三维效果,其中前者用于表示上、下、左、右面中的线;后者用于表示前、后曲面的线。
如前面曲面图元的构造如下
for (int i = 0; i < _yDim - 1; i++){
for (int j = 0; j < _xDim; j++){
_radarPlaneElements->push_back(j + i * _xDim);
_radarPlaneElements->push_back(j + (i + 1) * _xDim);}
_radarPlaneElements->push_back(restartindex); }
tmp = _yDim / _lineInterval;
off = (double)(_yDim) / tmp;
for (int i = 0; i <= tmp; i++){
double tmp1 = off * i;
int pos = int(tmp1);
if (pos >= _yDim)pos = _yDim - 1;
for (int j = 0; j < _xDim; j++)
_radarLineStripeElements->push_back(j + pos * _xDim);
_radarLineStripeElements->push_back(restartindex);}
tmp = _xDim / _lineInterval;
off = (double)(_xDim) / tmp;
for (int i = 0; i <= tmp; i++){
double tmp1 = off * i;
int pos = int(tmp1);
if (pos >= _xDim)
pos = _xDim - 1;
for (int j = 0; j < _yDim; j++)
_radarLineStripeElements->push_back(j * _xDim + pos);
_radarLineStripeElements->push_back(restartindex);}
上方平面图元的构造如下
for (int i = 0; i < _xDim; i++){
int pos = _xDim * (_yDim - 1) + i;
_radarPlaneElements->push_back(pos);
_radarPlaneElements->push_back(pos + _xDim * _yDim);}
_radarPlaneElements->push_back(restartindex);
tmp = _xDim / _lineInterval;
off = (double)(_xDim) / tmp;
for (int i = 0; i <= tmp; i++){
double tmp1 = off * i;
int pos = int(tmp1);
if (pos >= _xDim)pos = _xDim - 1;
_radarLineElements->push_back(_xDim * (_yDim - 1) + pos);
_radarLineElements->push_back(_xDim*_yDim + _xDim * (_yDim - 1) + pos);}
_radarLineElements->push_back(restartindex);
其余4个面也类似,分别构造。
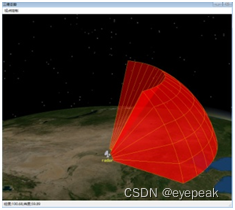
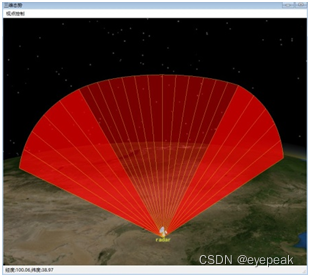
上图中,雷达方位角范围120°,最小仰角15°,最大仰角60°,最近最远距离为100km和1000km。
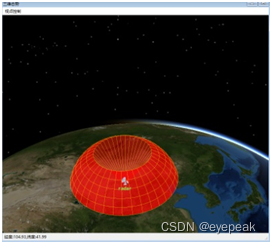
上图中表示全向雷达,方位角范围360°。
上图中雷达的最小距离为0。
需要指出的是,由于表示雷达的图元是按固定顺序构造的,而透明物体不写入z缓存将导致显示效果会随着视点而出现问题(博文《基于osgEarth的卫星瞬时覆盖绘制方法》),区别在于卫星圆锥覆盖是凸的,当采用Z缓存消隐加背面剔除时覆盖面肯定是正常的,改进是锦上添花,但是雷达范围本身较为复杂,即使采用了上述技术,覆盖面显示仍然会出现不稳定。下一步将解决此问题。
[1] 朱保安,何东越,徐成前,等.雷达模拟器设计与实现[J].电脑知识与技术,2022,18(20):115-117.
[2] 陈行勇,马启原.基于动画特效的电磁态势显控方法[J].电子信息对抗技术,2022,37(3):91-94.
[3] 冯晓哲,杨瑞,王健,等. 雷达探测威力范围与三维可视化研究[J].现代雷达,2015,37(5):74-78.
[4] 张尉,程柏林,刘素华.搜索雷达探测范围的可视化技术[J].现代雷达,2000,22(4):43-47.
[5] 陈鹏,孟国明,吴玲达.虚拟战场环境中雷达作用范围表现技术研究[J].北京理工大学学报,2006,26(26S):57-60.
[6] 徐鹏,王振华,刘东青,等. 基于STK的雷达威力三维可视化仿真方法[J]. 空军预警学院学报,2018,32(2):114-117.
[7] 刘东青,王振华,彭赛阳.基于STK平台下的雷达干扰可视化仿真分析[J]. 空军预警学院学报,2017,31(5):360-364.
[8] 陈弓,戴晨光,刘航冶.雷达阵地场景三维可视化系统的研究与实现[J].计算机仿真,2008,25(9):227-230.
[9] 杨超,陈鹏,魏迎梅.雷达最大探测范围三维可视化研究与实现[J]. 计算机工程与应用,2007,43(11):245-248.
[10] 邱航,陈雷霆.地形影响下雷达作用范围三维可视化研究[J]. 电子测量与仪器学报,2010,24(6):528-535.
我正在学习如何使用Nokogiri,根据这段代码我遇到了一些问题:require'rubygems'require'mechanize'post_agent=WWW::Mechanize.newpost_page=post_agent.get('http://www.vbulletin.org/forum/showthread.php?t=230708')puts"\nabsolutepathwithtbodygivesnil"putspost_page.parser.xpath('/html/body/div/div/div/div/div/table/tbody/tr/td/div
总的来说,我对ruby还比较陌生,我正在为我正在创建的对象编写一些rspec测试用例。许多测试用例都非常基础,我只是想确保正确填充和返回值。我想知道是否有办法使用循环结构来执行此操作。不必为我要测试的每个方法都设置一个assertEquals。例如:describeitem,"TestingtheItem"doit"willhaveanullvaluetostart"doitem=Item.new#HereIcoulddotheitem.name.shouldbe_nil#thenIcoulddoitem.category.shouldbe_nilendend但我想要一些方法来使用
类classAprivatedeffooputs:fooendpublicdefbarputs:barendprivatedefzimputs:zimendprotecteddefdibputs:dibendendA的实例a=A.new测试a.foorescueputs:faila.barrescueputs:faila.zimrescueputs:faila.dibrescueputs:faila.gazrescueputs:fail测试输出failbarfailfailfail.发送测试[:foo,:bar,:zim,:dib,:gaz].each{|m|a.send(m)resc
我正在尝试设置一个puppet节点,但rubygems似乎不正常。如果我通过它自己的二进制文件(/usr/lib/ruby/gems/1.8/gems/facter-1.5.8/bin/facter)在cli上运行facter,它工作正常,但如果我通过由rubygems(/usr/bin/facter)安装的二进制文件,它抛出:/usr/lib/ruby/1.8/facter/uptime.rb:11:undefinedmethod`get_uptime'forFacter::Util::Uptime:Module(NoMethodError)from/usr/lib/ruby
我想了解Ruby方法methods()是如何工作的。我尝试使用“ruby方法”在Google上搜索,但这不是我需要的。我也看过ruby-doc.org,但我没有找到这种方法。你能详细解释一下它是如何工作的或者给我一个链接吗?更新我用methods()方法做了实验,得到了这样的结果:'labrat'代码classFirstdeffirst_instance_mymethodenddefself.first_class_mymethodendendclassSecond使用类#returnsavailablemethodslistforclassandancestorsputsSeco
我在我的项目中添加了一个系统来重置用户密码并通过电子邮件将密码发送给他,以防他忘记密码。昨天它运行良好(当我实现它时)。当我今天尝试启动服务器时,出现以下错误。=>BootingWEBrick=>Rails3.2.1applicationstartingindevelopmentonhttp://0.0.0.0:3000=>Callwith-dtodetach=>Ctrl-CtoshutdownserverExiting/Users/vinayshenoy/.rvm/gems/ruby-1.9.3-p0/gems/actionmailer-3.2.1/lib/action_mailer
设置:狂欢ruby1.9.2高线(1.6.13)描述:我已经相当习惯在其他一些项目中使用highline,但已经有几个月没有使用它了。现在,在Ruby1.9.2上全新安装时,它似乎不允许在同一行回答提示。所以以前我会看到类似的东西:require"highline/import"ask"Whatisyourfavoritecolor?"并得到:Whatisyourfavoritecolor?|现在我看到类似的东西:Whatisyourfavoritecolor?|竖线(|)符号是我的终端光标。知道为什么会发生这种变化吗? 最佳答案
我已经从我的命令行中获得了一切,所以我可以运行rubymyfile并且它可以正常工作。但是当我尝试从sublime中运行它时,我得到了undefinedmethod`require_relative'formain:Object有人知道我的sublime设置中缺少什么吗?我正在使用OSX并安装了rvm。 最佳答案 或者,您可以只使用“require”,它应该可以正常工作。我认为“require_relative”仅适用于ruby1.9+ 关于ruby-主要:Objectwhenrun
我有一个具有一些属性的模型:attr1、attr2和attr3。我需要在不执行回调和验证的情况下更新此属性。我找到了update_column方法,但我想同时更新三个属性。我需要这样的东西:update_columns({attr1:val1,attr2:val2,attr3:val3})代替update_column(attr1,val1)update_column(attr2,val2)update_column(attr3,val3) 最佳答案 您可以使用update_columns(attr1:val1,attr2:val2
我不确定传递给方法的对象的类型是否正确。我可能会将一个字符串传递给一个只能处理整数的函数。某种运行时保证怎么样?我看不到比以下更好的选择:defsomeFixNumMangler(input)raise"wrongtype:integerrequired"unlessinput.class==FixNumother_stuffend有更好的选择吗? 最佳答案 使用Kernel#Integer在使用之前转换输入的方法。当无法以任何合理的方式将输入转换为整数时,它将引发ArgumentError。defmy_method(number)