PINN解偏微分方程实例2之一维非线性薛定谔方程
考虑偏微分方程如下:
i
h
t
+
0.5
h
x
x
+
∣
h
∣
2
h
=
0
h
(
0
,
x
)
=
2
s
e
c
h
(
x
)
h
(
t
,
−
5
)
=
h
(
t
,
5
)
h
x
(
t
,
−
5
)
=
h
x
(
t
,
5
)
\begin{align} \begin{aligned} & ih_t + 0.5h_{xx} + |h|^2h = 0 \\ & h(0,x) = 2 sech(x) \\ & h(t,-5) = h(t,5) \\ & h_x(t,-5) = h_x(t,5) \end{aligned} \end{align}
iht+0.5hxx+∣h∣2h=0h(0,x)=2sech(x)h(t,−5)=h(t,5)hx(t,−5)=hx(t,5)
其中
x
∈
[
−
5
,
5
]
,
t
∈
[
0
,
π
/
2
]
.
x\in[-5,5],t\in[0,\pi/2].
x∈[−5,5],t∈[0,π/2].这是一个带有周期性边界条件,初始条件和复数解的偏微分方程。
M
S
E
=
M
S
E
0
+
M
S
E
b
+
M
S
E
f
\begin{align} \begin{aligned} MSE = MSE_0 + MSE_b + MSE_f \\ \end{aligned} \end{align}
MSE=MSE0+MSEb+MSEf
其中
M
S
E
0
=
1
N
0
∑
i
=
1
N
0
∣
h
(
0
,
x
0
i
)
−
h
0
i
∣
2
M
S
E
b
=
1
N
b
∑
i
=
1
N
b
(
∣
h
i
(
t
b
i
,
−
5
)
−
h
i
(
t
b
i
,
5
)
∣
2
+
∣
h
x
i
(
t
b
i
,
−
5
)
−
h
x
i
(
t
b
i
,
5
)
∣
2
)
M
S
E
f
=
1
N
f
∑
i
=
1
N
f
∣
f
(
t
f
i
,
x
f
i
)
∣
2
\begin{align} \begin{aligned} MSE_0 &= \frac{1}{N_0}\sum_{i=1}^{N_0}|h(0,x_0^i)-h_0^i|^2 \\ MSE_b &= \frac{1}{N_b}\sum_{i=1}^{N_b}(|h^i(t_b^i,-5)-h^i(t_b^i,5)|^2+|h^i_x(t_b^i,-5)-h^i_x(t_b^i,5)|^2) \\ MSE_f &= \frac{1}{N_f}\sum_{i=1}^{N_f}|f(t_f^i,x_f^i)|^2 \\ \end{aligned} \end{align}
MSE0MSEbMSEf=N01i=1∑N0∣h(0,x0i)−h0i∣2=Nb1i=1∑Nb(∣hi(tbi,−5)−hi(tbi,5)∣2+∣hxi(tbi,−5)−hxi(tbi,5)∣2)=Nf1i=1∑Nf∣f(tfi,xfi)∣2
这里
M
S
E
0
MSE_0
MSE0是初始条件损失函数,
M
S
E
b
MSE_b
MSEb是周期条件损失函数,
M
S
E
f
MSE_f
MSEf是偏微分方程构造的损失函数。
由于
h
(
t
,
x
)
=
u
(
t
,
x
)
+
i
v
(
t
,
x
)
h(t,x)=u(t,x)+iv(t,x)
h(t,x)=u(t,x)+iv(t,x),在代码实现过程中,损失函数具体形式如下:
l
=
l
1
+
l
2
+
l
3
+
l
4
+
l
5
+
l
6
+
l
7
+
l
8
\begin{align} \begin{aligned} l = l_1 + l_2 + l_3 + l_4 + l_5 + l_6 + l_7 + l_8 \end{aligned} \end{align}
l=l1+l2+l3+l4+l5+l6+l7+l8
其中
l
1
=
1
N
0
∑
i
=
1
N
0
∣
u
(
0
,
x
0
i
)
−
u
0
i
∣
2
l
2
=
1
N
0
∑
i
=
1
N
0
∣
v
(
0
,
x
0
i
)
−
v
0
i
∣
2
l
3
=
1
N
b
∑
i
=
1
N
b
∣
u
i
(
t
b
i
,
−
5
)
−
u
i
(
t
b
i
,
5
)
∣
2
l
4
=
1
N
b
∑
i
=
1
N
b
∣
v
i
(
t
b
i
,
−
5
)
−
v
i
(
t
b
i
,
5
)
∣
2
l
5
=
1
N
b
∑
i
=
1
N
b
∣
u
x
i
(
t
b
i
,
−
5
)
−
u
x
i
(
t
b
i
,
5
)
∣
2
l
6
=
1
N
b
∑
i
=
1
N
b
∣
v
x
i
(
t
b
i
,
−
5
)
−
v
x
i
(
t
b
i
,
5
)
∣
2
l
7
=
1
N
f
∑
i
=
1
N
f
∣
u
t
+
0.5
∗
v
x
x
+
(
u
2
+
v
2
)
∗
v
∣
2
l
8
=
1
N
f
∑
i
=
1
N
f
∣
v
t
+
0.5
∗
u
x
x
+
(
u
2
+
v
2
)
∗
u
∣
2
\begin{align} \begin{aligned} l_1 &= \frac{1}{N_0}\sum_{i=1}^{N_0}|u(0,x_0^i)-u_0^i|^2 \\ l_2 &= \frac{1}{N_0}\sum_{i=1}^{N_0}|v(0,x_0^i)-v_0^i|^2 \\ l_3 &= \frac{1}{N_b}\sum_{i=1}^{N_b}|u^i(t_b^i,-5)-u^i(t_b^i,5)|^2 \\ l_4 &= \frac{1}{N_b}\sum_{i=1}^{N_b}|v^i(t_b^i,-5)-v^i(t_b^i,5)|^2 \\ l_5 &= \frac{1}{N_b}\sum_{i=1}^{N_b}|u^i_x(t_b^i,-5)-u^i_x(t_b^i,5)|^2 \\ l_6 &= \frac{1}{N_b}\sum_{i=1}^{N_b}|v^i_x(t_b^i,-5)-v^i_x(t_b^i,5)|^2 \\ l_7 &= \frac{1}{N_f}\sum_{i=1}^{N_f}|u_t + 0.5 *v _{xx} + (u^2+v^2)*v|^2 \\ l_8 &= \frac{1}{N_f}\sum_{i=1}^{N_f}|v_t + 0.5 *u _{xx} + (u^2+v^2)*u|^2 \\ \end{aligned} \end{align}
l1l2l3l4l5l6l7l8=N01i=1∑N0∣u(0,x0i)−u0i∣2=N01i=1∑N0∣v(0,x0i)−v0i∣2=Nb1i=1∑Nb∣ui(tbi,−5)−ui(tbi,5)∣2=Nb1i=1∑Nb∣vi(tbi,−5)−vi(tbi,5)∣2=Nb1i=1∑Nb∣uxi(tbi,−5)−uxi(tbi,5)∣2=Nb1i=1∑Nb∣vxi(tbi,−5)−vxi(tbi,5)∣2=Nf1i=1∑Nf∣ut+0.5∗vxx+(u2+v2)∗v∣2=Nf1i=1∑Nf∣vt+0.5∗uxx+(u2+v2)∗u∣2
这里
N
0
=
N
b
=
50
,
N
f
=
20000.
N_0=N_b=50,N_f=20000.
N0=Nb=50,Nf=20000. 其中
u
0
i
,
v
0
i
u_0^i,v_0^i
u0i,v0i为谱方法计算出来的真解,其它均为神经网络输出值。
代码参考下图进行理解。

代码参考https://github.com/maziarraissi/PINNs,原代码运行框架tensorflow1,这里将其改为tensorflow2上运行,代码如下:
"""
@author: Maziar Raissi
@Annotator:ST
利用谱方法计算了t*x为[0,pi/2]*[-5,5]区域上的真解,真解个数t*x为201*256
"""
import sys
sys.path.insert(0, '../../Utilities/')
import tensorflow.compat.v1 as tf # tensorflow1.0代码迁移到2.0上运行,加上这两行
tf.disable_v2_behavior()
import tensorflow as tf2
import numpy as np
import matplotlib.pyplot as plt
import scipy.io
from scipy.interpolate import griddata
from pyDOE import lhs # 拉丁超立方采样
from plotting import newfig, savefig
from mpl_toolkits.mplot3d import Axes3D
import time
import matplotlib.gridspec as gridspec
from mpl_toolkits.axes_grid1 import make_axes_locatable
np.random.seed(1234)
tf.random.set_random_seed(1234) # tf.random.set_seed
class PhysicsInformedNN:
# Initialize the class
def __init__(self, x0, u0, v0, tb, X_f, layers, lb, ub):
"""
由损失函数可以看出,周期性边界不需要真解,仅初始条件需要真解,就可以求解
:param x0: 左边界N0个点x值
:param u0: 左边界N0个点对应解的实部
:param v0: 左边界N0个点对应解的虚部
:param tb: 周期边界Nb个点t值
:param X_f: 在区域[0,pi/2]*[-5,5]内采用拉丁超立方采样得到的Nf个点的坐标值
:param layers: 神经网络各层神经元列表
:param lb: np.array([-5.0, 0.0])
:param ub: np.array([5.0, np.pi/2])
"""
X0 = np.concatenate((x0, 0*x0), 1) # 左边界坐标点(x,0)
X_lb = np.concatenate((0*tb + lb[0], tb), 1) # 下边界坐标点(-5,t)
X_ub = np.concatenate((0*tb + ub[0], tb), 1) # 上边界坐标点(5,t)
self.lb = lb
self.ub = ub
self.x0 = X0[:,0:1]
self.t0 = X0[:,1:2]
self.x_lb = X_lb[:,0:1]
self.t_lb = X_lb[:,1:2]
self.x_ub = X_ub[:,0:1]
self.t_ub = X_ub[:,1:2]
self.x_f = X_f[:,0:1]
self.t_f = X_f[:,1:2]
self.u0 = u0
self.v0 = v0
# Initialize NNs
self.layers = layers
self.weights, self.biases = self.initialize_NN(layers)
# tf Placeholders
self.x0_tf = tf.placeholder(tf.float32, shape=[None, self.x0.shape[1]]) # tf.placeholder改为tf.compat.v1.placeholder
self.t0_tf = tf.placeholder(tf.float32, shape=[None, self.t0.shape[1]]) # tf.placeholder改为tf.compat.v1.placeholder
self.u0_tf = tf.placeholder(tf.float32, shape=[None, self.u0.shape[1]]) # tf.placeholder改为tf.compat.v1.placeholder
self.v0_tf = tf.placeholder(tf.float32, shape=[None, self.v0.shape[1]]) # tf.placeholder改为tf.compat.v1.placeholder
self.x_lb_tf = tf.placeholder(tf.float32, shape=[None, self.x_lb.shape[1]]) # tf.placeholder改为tf.compat.v1.placeholder
self.t_lb_tf = tf.placeholder(tf.float32, shape=[None, self.t_lb.shape[1]]) # tf.placeholder改为tf.compat.v1.placeholder
self.x_ub_tf = tf.placeholder(tf.float32, shape=[None, self.x_ub.shape[1]]) # tf.placeholder改为tf.compat.v1.placeholder
self.t_ub_tf = tf.placeholder(tf.float32, shape=[None, self.t_ub.shape[1]]) # tf.placeholder改为tf.compat.v1.placeholder
self.x_f_tf = tf.placeholder(tf.float32, shape=[None, self.x_f.shape[1]]) # tf.placeholder改为tf.compat.v1.placeholder
self.t_f_tf = tf.placeholder(tf.float32, shape=[None, self.t_f.shape[1]]) # tf.placeholder改为tf.compat.v1.placeholder
# tf Graphs
self.u0_pred, self.v0_pred, _ , _ = self.net_uv(self.x0_tf, self.t0_tf) # 左边界
self.u_lb_pred, self.v_lb_pred, self.u_x_lb_pred, self.v_x_lb_pred = self.net_uv(self.x_lb_tf, self.t_lb_tf) # 下边界
self.u_ub_pred, self.v_ub_pred, self.u_x_ub_pred, self.v_x_ub_pred = self.net_uv(self.x_ub_tf, self.t_ub_tf) # 上边界
self.f_u_pred, self.f_v_pred = self.net_f_uv(self.x_f_tf, self.t_f_tf)
# Loss
self.loss = tf.reduce_mean(tf.square(self.u0_tf - self.u0_pred)) + \
tf.reduce_mean(tf.square(self.v0_tf - self.v0_pred)) + \
tf.reduce_mean(tf.square(self.u_lb_pred - self.u_ub_pred)) + \
tf.reduce_mean(tf.square(self.v_lb_pred - self.v_ub_pred)) + \
tf.reduce_mean(tf.square(self.u_x_lb_pred - self.u_x_ub_pred)) + \
tf.reduce_mean(tf.square(self.v_x_lb_pred - self.v_x_ub_pred)) + \
tf.reduce_mean(tf.square(self.f_u_pred)) + \
tf.reduce_mean(tf.square(self.f_v_pred))
# MSE0|u|^2 + MSE0|v|^2 +
# MSEb|u(-5)-u(5)|^2 + MSEb|v(-5)-v(5)|^2 +
# MSEb|u_x(-5)-u_x(5)|^2 + MSEb|v_x(-5)-v_x(5)|^2
# MSEf|u|^2 + MSEf|v|^2
# 获取损失函数历史记录
# self.optimizer = tf.contrib.opt.ScipyOptimizerInterface(self.loss, # 将tf.contrib.opt改为tf.compat.v1.estimator.opt
# method = 'L-BFGS-B',
# options = {'maxiter': 50000,
# 'maxfun': 50000,
# 'maxcor': 50,
# 'maxls': 50,
# 'ftol' : 1.0 * np.finfo(float).eps})
self.optimizer_Adam = tf.train.AdamOptimizer()
self.train_op_Adam = self.optimizer_Adam.minimize(self.loss) # 反向传播算法更新权重和偏置
# tf session
self.sess = tf.Session(config=tf.ConfigProto(allow_soft_placement=True,
log_device_placement=True))
init = tf.global_variables_initializer()
self.sess.run(init)
def initialize_NN(self, layers):
"""
初始化网络权重和偏置参数
:param layers: eg.[2, 100, 100, 100, 100, 2]
:return:
"""
weights = []
biases = []
num_layers = len(layers)
for l in range(0,num_layers-1):
W = self.xavier_init(size=[layers[l], layers[l+1]])
b = tf.Variable(tf.zeros([1,layers[l+1]], dtype=tf.float32), dtype=tf.float32)
weights.append(W)
biases.append(b)
return weights, biases
def xavier_init(self, size):
"""
正态分布初始化权重
tf.compat.v1.random.truncated_normal(维度,正态分布均值,正态分布标准差):截断的产生正态分布的随机数,即随机数与均值的差值若大于两倍的标准差,则重新生成。
:param size:
:return:
"""
in_dim = size[0]
out_dim = size[1]
xavier_stddev = np.sqrt(2/(in_dim + out_dim))
# return tf.Variable(tf.truncated_normal([in_dim, out_dim], stddev=xavier_stddev), dtype=tf.float32)
return tf.Variable(tf.compat.v1.random.truncated_normal([in_dim, out_dim], stddev=xavier_stddev), dtype=tf.float32)
def neural_net(self, X, weights, biases):
"""
:param X: 输入(x,t)
:param weights: 模型权重
:param biases: 模型偏置
:return: 返回(u,v),其中u为真解实部,v为真解虚部
"""
num_layers = len(weights) + 1
H = 2.0*(X - self.lb)/(self.ub - self.lb) - 1.0
for l in range(0,num_layers-2):
W = weights[l]
b = biases[l]
H = tf.tanh(tf.add(tf.matmul(H, W), b))
W = weights[-1]
b = biases[-1]
Y = tf.add(tf.matmul(H, W), b)
return Y
def net_uv(self, x, t):
X = tf.concat([x,t],1)
uv = self.neural_net(X, self.weights, self.biases)
u = uv[:,0:1]
v = uv[:,1:2]
u_x = tf.gradients(u, x)[0]
v_x = tf.gradients(v, x)[0]
return u, v, u_x, v_x
def net_f_uv(self, x, t):
u, v, u_x, v_x = self.net_uv(x,t)
u_t = tf.gradients(u, t)[0]
u_xx = tf.gradients(u_x, x)[0]
v_t = tf.gradients(v, t)[0]
v_xx = tf.gradients(v_x, x)[0]
f_u = u_t + 0.5*v_xx + (u**2 + v**2)*v
f_v = v_t - 0.5*u_xx - (u**2 + v**2)*u
return f_u, f_v
def callback(self, loss):
print('Loss:', loss)
def train(self, nIter):
tf_dict = {self.x0_tf: self.x0, self.t0_tf: self.t0,
self.u0_tf: self.u0, self.v0_tf: self.v0,
self.x_lb_tf: self.x_lb, self.t_lb_tf: self.t_lb,
self.x_ub_tf: self.x_ub, self.t_ub_tf: self.t_ub,
self.x_f_tf: self.x_f, self.t_f_tf: self.t_f}
start_time = time.time()
for it in range(nIter):
self.sess.run(self.train_op_Adam, tf_dict)
# Print
if it % 10 == 0:
elapsed = time.time() - start_time
loss_value = self.sess.run(self.loss, tf_dict)
print('It: %d, Loss: %.3e, Time: %.2f' %
(it, loss_value, elapsed))
start_time = time.time()
# self.optimizer.minimize(self.sess,
# feed_dict = tf_dict,
# fetches = [self.loss],
# loss_callback = self.callback)
#
def predict(self, X_star):
"""
:param X_star: 真解坐标值(x,y)
:return:
"""
tf_dict = {self.x0_tf: X_star[:,0:1], self.t0_tf: X_star[:,1:2]}
u_star = self.sess.run(self.u0_pred, tf_dict) # 执行sess.run()时,tensorflow并不是计算了整个图,只是计算了与想要fetch的值相关的部分。
u_star = self.sess.run(self.v0_pred, tf_dict) # 这里u_star、u_star是h(t,x)=u(t,x)+iv(t,x)
tf_dict = {self.x_f_tf: X_star[:,0:1], self.t_f_tf: X_star[:,1:2]}
f_u_star = self.sess.run(self.f_u_pred, tf_dict) # 这里f_u_star是u_t + 0.5*v_xx + (u**2 + v**2)*v
f_v_star = self.sess.run(self.f_v_pred, tf_dict) # 这里f_v_star是v_t - 0.5*u_xx - (u**2 + v**2)*u
return u_star, v_star, f_u_star, f_v_star
if __name__ == "__main__":
noise = 0.0
# Doman bounds
lb = np.array([-5.0, 0.0])
ub = np.array([5.0, np.pi/2])
N0 = 50
N_b = 50
N_f = 20000
layers = [2, 100, 100, 100, 100, 2]
data = scipy.io.loadmat('../Data/NLS.mat')
t = data['tt'].flatten()[:,None] # (201,1)
x = data['x'].flatten()[:,None] # (256,1)
Exact = data['uu'] # (256,201)
Exact_u = np.real(Exact) # (256,201)
Exact_v = np.imag(Exact) # (256,201)
Exact_h = np.sqrt(Exact_u**2 + Exact_v**2)
X, T = np.meshgrid(x,t)
X_star = np.hstack((X.flatten()[:,None], T.flatten()[:,None]))
u_star = Exact_u.T.flatten()[:,None]
v_star = Exact_v.T.flatten()[:,None]
h_star = Exact_h.T.flatten()[:,None]
###########################
idx_x = np.random.choice(x.shape[0], N0, replace=False) # 从0-256中选取N0个整数
x0 = x[idx_x,:] # (50,1)
u0 = Exact_u[idx_x,0:1] # (50,1)
v0 = Exact_v[idx_x,0:1] # (50,1)
idx_t = np.random.choice(t.shape[0], N_b, replace=False)
tb = t[idx_t,:] # (50,1)
X_f = lb + (ub-lb)*lhs(2, N_f) # (20000,2) # lhs(因子数,采样数)
"""
lhs(因子数,采样数):拉丁超立方采样,若因子数为2,默认取样空间是[0,1]*[0,1]
这里通过(-5,0)+(10,pi/2)*lhs(2, N_f)可以改变取样空间
"""
model = PhysicsInformedNN(x0, u0, v0, tb, X_f, layers, lb, ub)
start_time = time.time()
model.train(50000)
elapsed = time.time() - start_time
print('Training time: %.4f' % (elapsed))
u_pred, v_pred, f_u_pred, f_v_pred = model.predict(X_star)
h_pred = np.sqrt(u_pred**2 + v_pred**2)
error_u = np.linalg.norm(u_star-u_pred,2)/np.linalg.norm(u_star,2) # np.linalg.norm求2范数
error_v = np.linalg.norm(v_star-v_pred,2)/np.linalg.norm(v_star,2)
error_h = np.linalg.norm(h_star-h_pred,2)/np.linalg.norm(h_star,2)
print('Error u: %e' % (error_u))
print('Error v: %e' % (error_v))
print('Error h: %e' % (error_h))
U_pred = griddata(X_star, u_pred.flatten(), (X, T), method='cubic') # (201,256)
V_pred = griddata(X_star, v_pred.flatten(), (X, T), method='cubic')
H_pred = griddata(X_star, h_pred.flatten(), (X, T), method='cubic')
FU_pred = griddata(X_star, f_u_pred.flatten(), (X, T), method='cubic')
FV_pred = griddata(X_star, f_v_pred.flatten(), (X, T), method='cubic')
######################################################################
############################# Plotting ###############################
######################################################################
X0 = np.concatenate((x0, 0*x0), 1)
X_lb = np.concatenate((0*tb + lb[0], tb), 1)
X_ub = np.concatenate((0*tb + ub[0], tb), 1)
X_u_train = np.vstack([X0, X_lb, X_ub])
fig, ax = newfig(1.0, 0.9)
ax.axis('off')
####### Row 0: h(t,x) ##################
gs0 = gridspec.GridSpec(1, 2)
gs0.update(top=1-0.06, bottom=1-1/3, left=0.15, right=0.85, wspace=0)
ax = plt.subplot(gs0[:, :])
h = ax.imshow(H_pred.T, interpolation='nearest', cmap='YlGnBu',
extent=[lb[1], ub[1], lb[0], ub[0]],
origin='lower', aspect='auto')
divider = make_axes_locatable(ax)
cax = divider.append_axes("right", size="5%", pad=0.05)
fig.colorbar(h, cax=cax)
ax.plot(X_u_train[:,1], X_u_train[:,0], 'kx', label = 'Data (%d points)' % (X_u_train.shape[0]), markersize = 4, clip_on = False)
line = np.linspace(x.min(), x.max(), 2)[:,None]
ax.plot(t[75]*np.ones((2,1)), line, 'k--', linewidth = 1)
ax.plot(t[100]*np.ones((2,1)), line, 'k--', linewidth = 1)
ax.plot(t[125]*np.ones((2,1)), line, 'k--', linewidth = 1)
ax.set_xlabel('$t$')
ax.set_ylabel('$x$')
leg = ax.legend(frameon=False, loc = 'best')
# plt.setp(leg.get_texts(), color='w')
ax.set_title('$|h(t,x)|$', fontsize = 10)
####### Row 1: h(t,x) slices ##################
gs1 = gridspec.GridSpec(1, 3)
gs1.update(top=1-1/3, bottom=0, left=0.1, right=0.9, wspace=0.5)
ax = plt.subplot(gs1[0, 0])
ax.plot(x,Exact_h[:,75], 'b-', linewidth = 2, label = 'Exact')
ax.plot(x,H_pred[75,:], 'r--', linewidth = 2, label = 'Prediction')
ax.set_xlabel('$x$')
ax.set_ylabel('$|h(t,x)|$')
ax.set_title('$t = %.2f$' % (t[75]), fontsize = 10)
ax.axis('square')
ax.set_xlim([-5.1,5.1])
ax.set_ylim([-0.1,5.1])
ax = plt.subplot(gs1[0, 1])
ax.plot(x,Exact_h[:,100], 'b-', linewidth = 2, label = 'Exact')
ax.plot(x,H_pred[100,:], 'r--', linewidth = 2, label = 'Prediction')
ax.set_xlabel('$x$')
ax.set_ylabel('$|h(t,x)|$')
ax.axis('square')
ax.set_xlim([-5.1,5.1])
ax.set_ylim([-0.1,5.1])
ax.set_title('$t = %.2f$' % (t[100]), fontsize = 10)
ax.legend(loc='upper center', bbox_to_anchor=(0.5, -0.8), ncol=5, frameon=False)
ax = plt.subplot(gs1[0, 2])
ax.plot(x,Exact_h[:,125], 'b-', linewidth = 2, label = 'Exact')
ax.plot(x,H_pred[125,:], 'r--', linewidth = 2, label = 'Prediction')
ax.set_xlabel('$x$')
ax.set_ylabel('$|h(t,x)|$')
ax.axis('square')
ax.set_xlim([-5.1,5.1])
ax.set_ylim([-0.1,5.1])
ax.set_title('$t = %.2f$' % (t[125]), fontsize = 10)
# plt.show()
savefig('./figures/retest/reNLS')
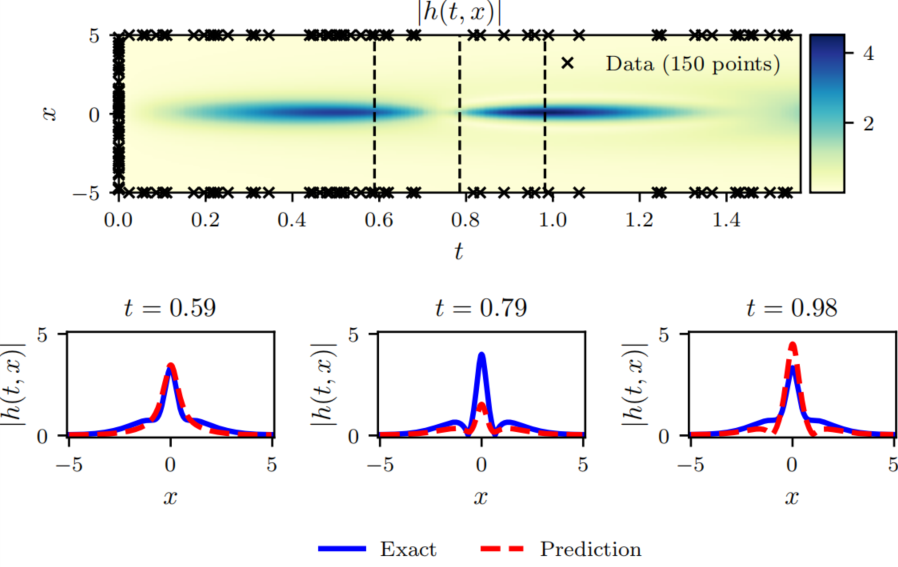
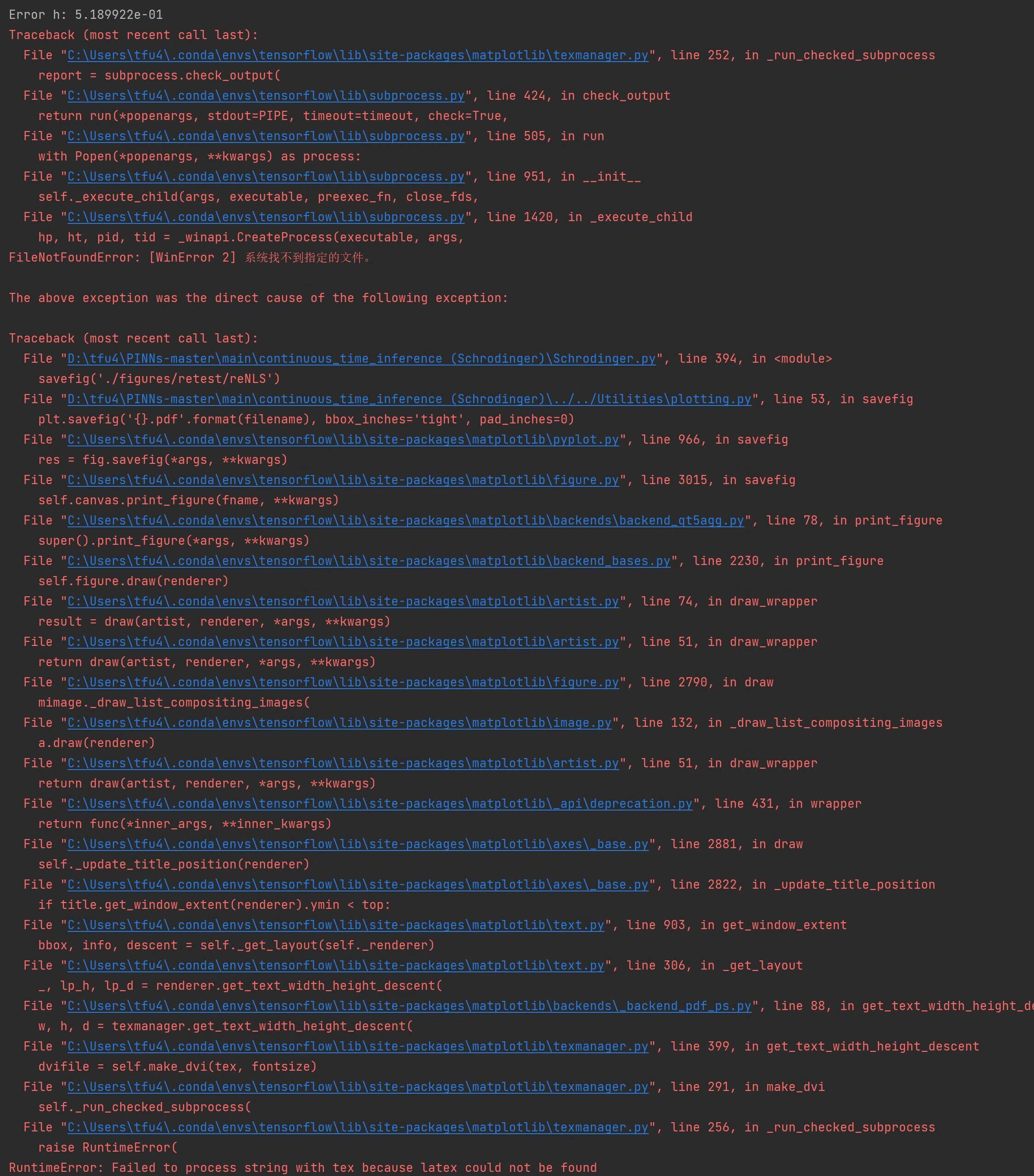
这里使用4层全连接神经网络,输入层和输出层各两个神经元,输入层两个神经元分别代表 x , t x,t x,t,输出层两个神经元分别代表 u ( x , t ) , v ( x , t ) u(x,t),v(x,t) u(x,t),v(x,t),隐藏层每层100个神经元。为了计算误差,作者提供了使用谱方法计算的 ( 256 ∗ 201 ) (256*201) (256∗201)个真解,其中第一维度代表空间 x x x,第二维度代表时间 t t t. 训练50000次之后输出结果如下:
It: 49990, Loss: 8.158e-05, Time: 0.38
Training time: 1970.0348
Error u: 1.154980e+00
Error v: 0.000000e+00
Error h: 4.879406e-01
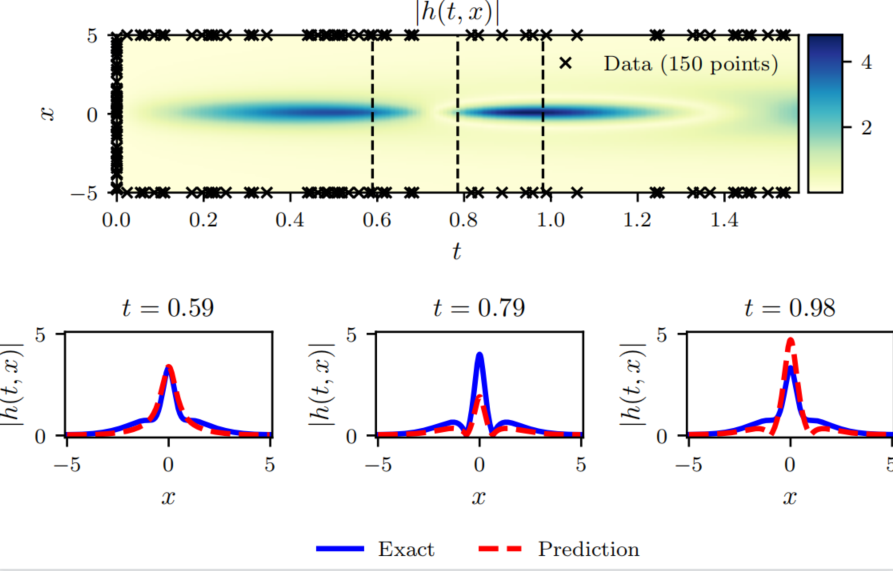
为了对比,下面是训练10000次的结果。
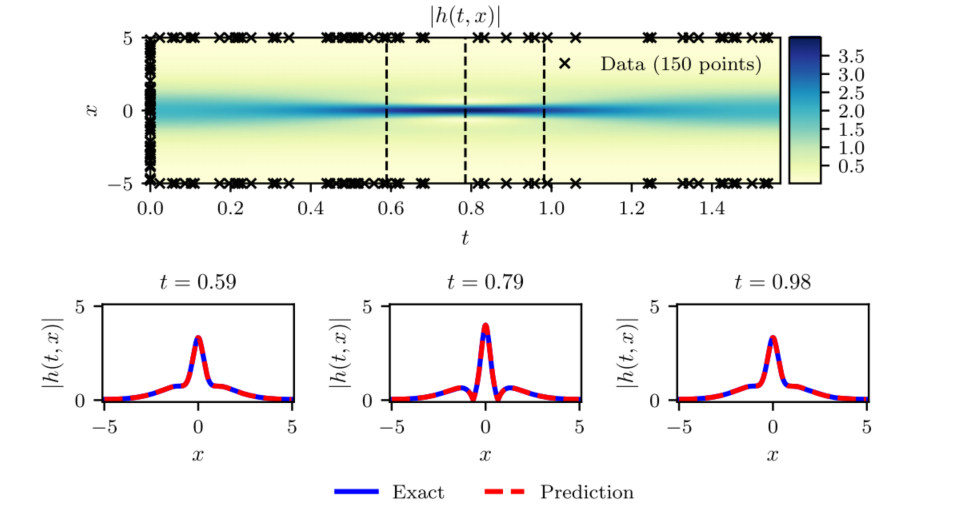
接下来是作者论文中的训练结果。
1. 若遇到以下问题,是由于matplotlib版本过高导致,具体解释见博客,我这里使用的matplotlib版本是3.4.3。
解决方法:
卸载使用虚拟环境中的matplotlib,安装matplotlib v3.4.3版本。
pip uninstall matplotlib
pip install matplotlib==3.4.3
2. 若出现cannot import name ‘newfig’ from 'plotting’错误。
解决方法:
见评论。
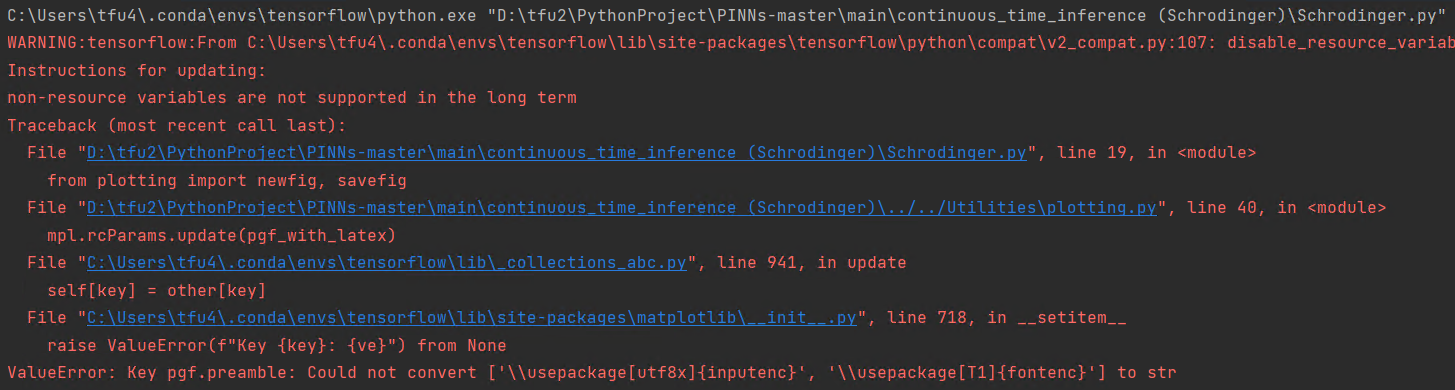
3. 若出现如下问题:
解决方法: 可以在代码导入包处加入以下两行代码。
import matplotlib as mpl
mpl.rcParams.update(mpl.rcParamsDefault)
我正在查看instance_variable_set的文档并看到给出的示例代码是这样做的:obj.instance_variable_set(:@instnc_var,"valuefortheinstancevariable")然后允许您在类的任何实例方法中以@instnc_var的形式访问该变量。我想知道为什么在@instnc_var之前需要一个冒号:。冒号有什么作用? 最佳答案 我的第一直觉是告诉你不要使用instance_variable_set除非你真的知道你用它做什么。它本质上是一种元编程工具或绕过实例变量可见性的黑客攻击
在我的应用程序中,我需要能够找到所有数字子字符串,然后扫描每个子字符串,找到第一个匹配范围(例如5到15之间)的子字符串,并将该实例替换为另一个字符串“X”。我的测试字符串s="1foo100bar10gee1"我的初始模式是1个或多个数字的任何字符串,例如,re=Regexp.new(/\d+/)matches=s.scan(re)给出["1","100","10","1"]如果我想用“X”替换第N个匹配项,并且只替换第N个匹配项,我该怎么做?例如,如果我想替换第三个匹配项“10”(匹配项[2]),我不能只说s[matches[2]]="X"因为它做了两次替换“1fooX0barXg
我有一个正在构建的应用程序,我需要一个模型来创建另一个模型的实例。我希望每辆车都有4个轮胎。汽车模型classCar轮胎模型classTire但是,在make_tires内部有一个错误,如果我为Tire尝试它,则没有用于创建或新建的activerecord方法。当我检查轮胎时,它没有这些方法。我该如何补救?错误是这样的:未定义的方法'create'forActiveRecord::AttributeMethods::Serialization::Tire::Module我测试了两个环境:测试和开发,它们都因相同的错误而失败。 最佳答案
我正在处理旧代码的一部分。beforedoallow_any_instance_of(SportRateManager).toreceive(:create).and_return(true)endRubocop错误如下:Avoidstubbingusing'allow_any_instance_of'我读到了RuboCop::RSpec:AnyInstance我试着像下面那样改变它。由此beforedoallow_any_instance_of(SportRateManager).toreceive(:create).and_return(true)end对此:let(:sport_
我收到格式为的回复#我需要将其转换为哈希值(针对活跃商家)。目前我正在遍历变量并执行此操作:response.instance_variables.eachdo|r|my_hash.merge!(r.to_s.delete("@").intern=>response.instance_eval(r.to_s.delete("@")))end这有效,它将生成{:first="charlie",:last=>"kelly"},但它似乎有点hacky和不稳定。有更好的方法吗?编辑:我刚刚意识到我可以使用instance_variable_get作为该等式的第二部分,但这仍然是主要问题。
为什么以下不同?Time.now.end_of_day==Time.now.end_of_day-0.days#falseTime.now.end_of_day.to_s==Time.now.end_of_day-0.days.to_s#true 最佳答案 因为纳秒数不同:ruby-1.9.2-p180:014>(Time.now.end_of_day-0.days).nsec=>999999000ruby-1.9.2-p180:015>Time.now.end_of_day.nsec=>999999998
我正在写一篇关于在Ruby中几乎一切都是对象的博客文章,我试图通过以下示例来展示这一点:classCoolBeansattr_accessor:beansdefinitialize@bean=[]enddefcount_beans@beans.countendend所以从类中我们可以看出它有4个方法(当然,除非我错了):它可以在创建新实例时初始化一个默认的空bean数组它可以计算它有多少个bean它可以读取它有多少个bean(通过attr_accessor)它可以向空数组写入(或添加)更多bean(也通过attr_accessor)但是,当我询问类本身它有哪些实例方法时,我没有看到默认
如果我有以下一段Ruby代码:classBlahdefself.bleh@blih="Hello"@@bloh="World"endend@blih和@@bloh到底是什么?@blih是Blah类中的一个实例变量,@@bloh是Blah类中的一个类变量,对吗?这是否意味着@@bloh是Blah的类Class中的一个变量? 最佳答案 人们似乎忽略了该方法是类方法。@blih将是常量Bleh的类Class实例的实例变量。因此:irb(main):001:0>classBlehirb(main):002:1>defself.blehirb
我理解(我认为)Ruby中类变量和类的实例变量之间的区别。我想知道如何从该类外部访问该类的实例变量。从内部(即在类方法中而不是实例方法中),它可以直接访问,但是从外部,有没有办法做MyClass.class.[@$#]variablename?我没有任何具体原因要这样做,只是学习Ruby并想知道是否可行。 最佳答案 classMyClass@my_class_instance_var="foo"class上述yield:>>foo我相信Arkku演示了如何从类外部访问类变量(@@),而不是类实例变量(@)。我从这篇文章中提取了上述内
print"Enteryourpassword:"pass=STDIN.noecho(&:gets)puts"Yourpasswordis#{pass}!"输出:Enteryourpassword:input.rb:2:in`':undefinedmethod`noecho'for#>(NoMethodError) 最佳答案 一开始require'io/console'后来的Ruby1.9.3 关于ruby-为什么不能使用类IO的实例方法noecho?,我们在StackOverflow上