本文描述了liunx驱动ko的编译方法,其中单编驱动ko是本文的重点。
什么是ko?
在Linux中一个.ko文件就是一个模块文件。
linux提供了一种称为模块(Module)的机制,模块具有以下特点:
1、模块自身不被编译到内核映像中,从而不影响内核映像的大小
2、一旦模块被加载,模块和内核中的其他部分的功能完全一样。

实验环境如下:
硬件环境基于MINI2440开发板,软件环境基于linux-2.6.32.2
我们使用gcc交叉编译工具可以通过.c文件直接编译出可执行文件
arm-linux-gcc demo.c -o demo

那么可以通过这种方式直接编译驱动ko吗?
答案是不可以!

驱动程序中使用了大量的linux内核函数和数据,因此驱动程序的编译依赖linux内核源码,如下图所示。
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/init.h>
static struct file_operations demo_flops =
{
.owner = THIS_MODULE,
.open = demo_open,
.write = demo_write,
.read = demo_read,
.release = demo_close,
};
这里有两种方法可以用来得到ko文件。
方法一:整编内核
方法二:单编ko
编写一个demo_driver.c的驱动程序(整编内核和单编ko都使用该代码),驱动程序源码如下:
/**
*********************************************************************************************************
* demo_driver
* (c) Copyright 2021-2031
* All Rights Reserved
*
* @File :
* @By : liwei
* @Version : V0.01
*
*********************************************************************************************************
**/
/**********************************************************************************************************
Includes
**********************************************************************************************************/
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/init.h>
/**********************************************************************************************************
Define
**********************************************************************************************************/
#define DRIVER_MAJOR 188
#define DEVICE_NAME "demo_driver"
/***********************************************************************************************************
* @描述 :
***********************************************************************************************************/
static int demo_open(struct inode *inode, struct file *file)
{
printk(KERN_EMERG "======================demo_open======================\n");
return 0;
}
/***********************************************************************************************************
* @描述 :
***********************************************************************************************************/
static ssize_t demo_write(struct file *file, const char __user * buf, size_t count, loff_t *ppos)
{
printk(KERN_EMERG "======================demo_write======================\n");
return 0;
}
/***********************************************************************************************************
* @描述 :
***********************************************************************************************************/
static ssize_t demo_read(struct file *file, char __user * buf, size_t count, loff_t *ppos)
{
printk(KERN_EMERG "======================demo_read ======================\n");
return 0;
}
/***********************************************************************************************************
* @描述 :
***********************************************************************************************************/
static int demo_close(struct inode *inode, struct file *file)
{
printk(KERN_EMERG "======================demo_close ======================\n");
return 0;
}
/***********************************************************************************************************
* @描述 :
***********************************************************************************************************/
static struct file_operations demo_flops =
{
.owner = THIS_MODULE,
.open = demo_open,
.write = demo_write,
.read = demo_read,
.release = demo_close,
};
/***********************************************************************************************************
* @描述 :
***********************************************************************************************************/
static int __init demo_init(void)
{
int ret;
//注册设备
ret = register_chrdev(DRIVER_MAJOR,DEVICE_NAME, &demo_flops);
if (ret < 0)
{
printk(KERN_EMERG DEVICE_NAME " can't register major number.\n");
return ret;
}
else
{
printk(KERN_EMERG DEVICE_NAME " ======================demo init======================\n");
}
return 0;
}
/***********************************************************************************************************
* @描述 :
***********************************************************************************************************/
static void __exit demo_exit(void)
{
unregister_chrdev(DRIVER_MAJOR, DEVICE_NAME);
printk(KERN_EMERG DEVICE_NAME " ======================demoexit======================\n");
}
module_init(demo_init);
module_exit(demo_exit);
MODULE_LICENSE("GPL");
/***********************************************END*******************************************************/
我们将demo_driver.c程序拷贝到…/linux-2.6.32.2/drivers/char目录下。
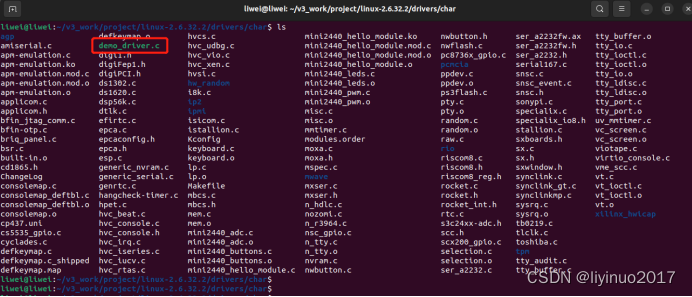
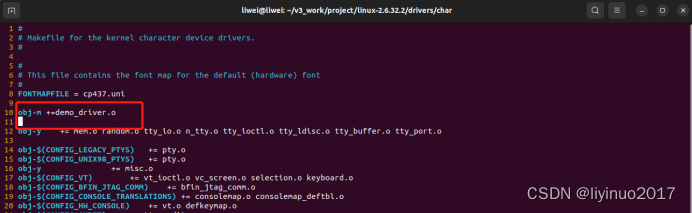
修改…/linux-2.6.32.2/drivers/char目录下Makefile文件,在Makefile中增加如下代码:
obj-m += demo_driver.o
回到linux内核源码根目下…/linux-2.6.32.2 ,执行编译指令
make
等待内核编译约20分钟…

最终得到demo_driver.ko
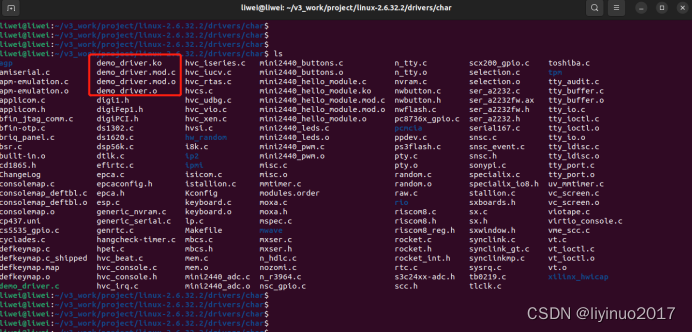
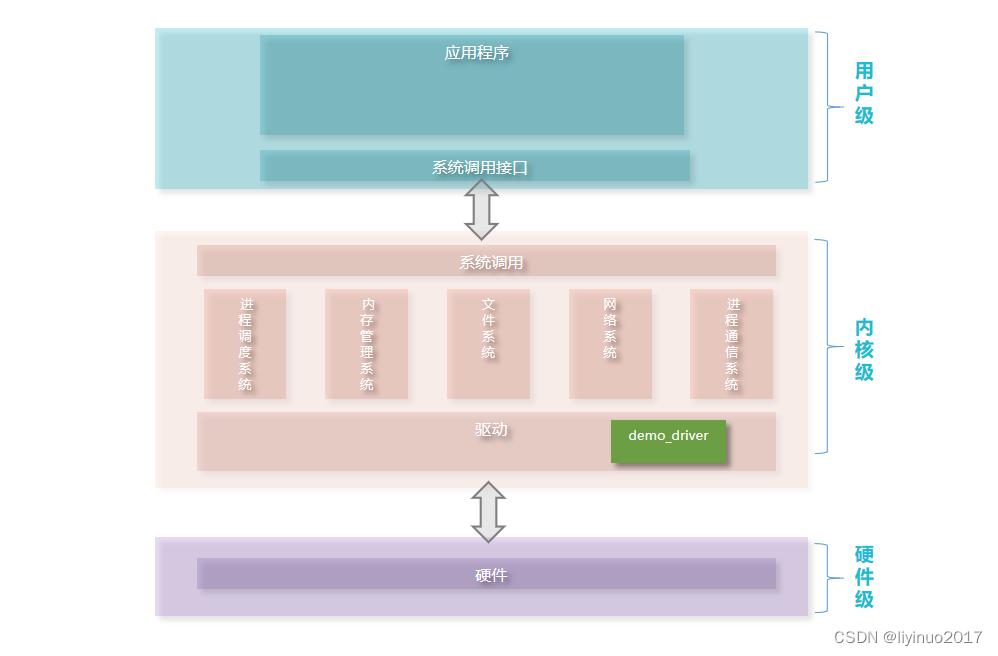
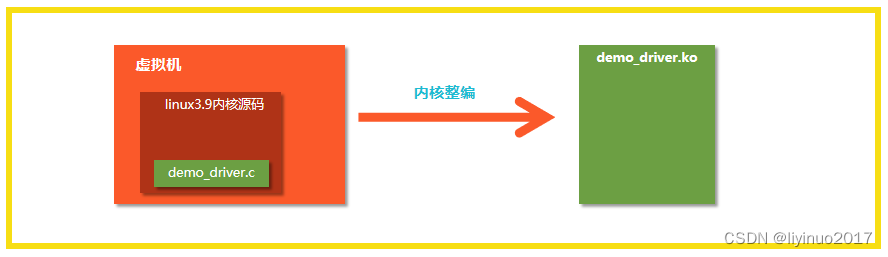
总结:为了得到ko 我们对内核进行了整编,整个编译过程持续20分钟左右。
整编内核的模式示意图如下:
make modules 指令为编译内核模块指令,该指令的功能是编译内核中所有配置为模块的程序得到模块ko文件,make modules 命令只能在内核源码顶层目录下执行。
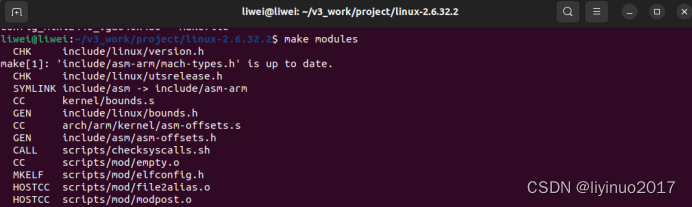
make modules是编译所有的内核模块,如何单独编译一个指定的模块呢?我增加M参数
make M=DIR modules
“M=”参数的作用是以内核源码为基础编译一个外部模块。命令中“M=DIR”,程序会自动跳转到所指定的DIR目录中查找模块源码,编译生成ko文件。
单编KO的Makefile文件如下:
.PHONY: main clean
KERNELDIR := /home/liwei/v3_work/project/linux-2.6.32.2
PWD := $(shell pwd)
CROSS_ARCH := /home/liwei/v3_work/tools/arm-linux-gcc-4.4.3/opt/FriendlyARM/toolschain/4.4.3/bin/arm-linux-gcc
obj-m += demo_driver.o
main:
$(MAKE) $(CROSS_ARCH) -C $(KERNELDIR) M=$(PWD) modules
clean:
rm -rf *.o *~ core .depend .*.cmd *.ko *.mod.c .tmp_versions *.symvers *.d *.markers *.order
Makefile文件解析如下:
Makefile的语法可以参考《跟我一起写 Makefile》
.PHONY: main clean
.PHONY来显示地指明main clean是伪目标
KERNELDIR := /home/liwei/v3_work/project/linux-2.6.32.2
PWD := $(shell pwd)
CROSS_ARCH := /home/liwei/v3_work/tools/arm-linux-gcc-4.4.3/opt/FriendlyARM/toolschain/4.4.3/bin/arm-linux-gcc
定义了KERNELDIR ,PWD ,CROSS_ARCH 三个变量。
obj-m += demo_driver.o
指定将demo_driver.c编译成demo_driver.ko文件。
main:
$(MAKE) $(CROSS_ARCH) -C $(KERNELDIR) M=$(PWD) modules
main:是第一个伪目标,也就是默认目标
$(MAKE) 为make
$(CROSS_ARCH) 为指定的编译工具
-C ( K E R N E L D I R ) 选项的作用是将工作目录转移到指定的 K E R N E L D I R 位置 M = (KERNELDIR) 选项的作用是将工作目录转移到指定的KERNELDIR位置 M= (KERNELDIR)选项的作用是将工作目录转移到指定的KERNELDIR位置M=(PWD) modules ,作用是以内核源码为基础编译一个外部模块
clean:
rm -rf *.o *~ core .depend .*.cmd *.ko *.mod.c .tmp_versions *.symvers *.d *.markers *.order
clean是执行清除工作的伪目标。
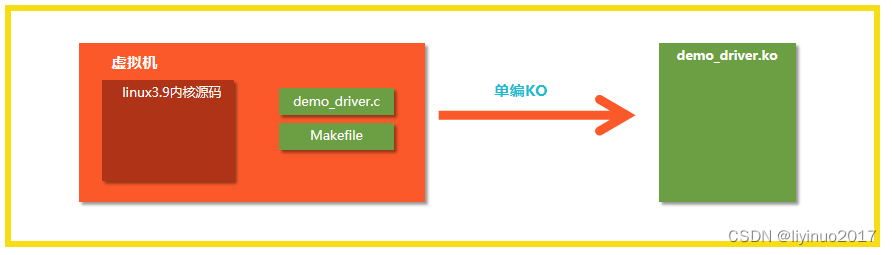
将demo_driver.c和上述的Makefile文件放在同一个目录下(路径为任何路径,不需要一定放在内核目录中),执行make指令。
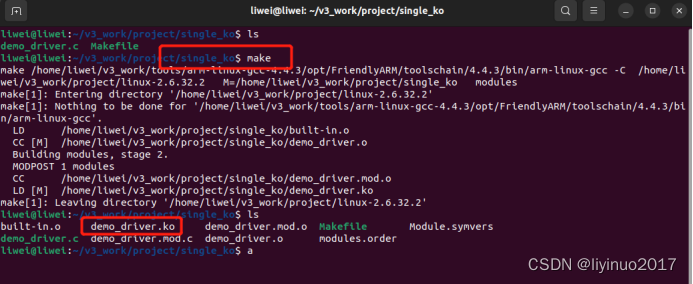
大约3秒钟,编译得到demo_driver.ko文件,单编KO的优势就是快(3秒钟)

最终得到了demo_driver.ko文件,我们将文件传输到开发板中并测试驱动ko文件。
执行加载驱动:
insmod demo_driver.ko
查看驱动设备:
cat /proc/devices
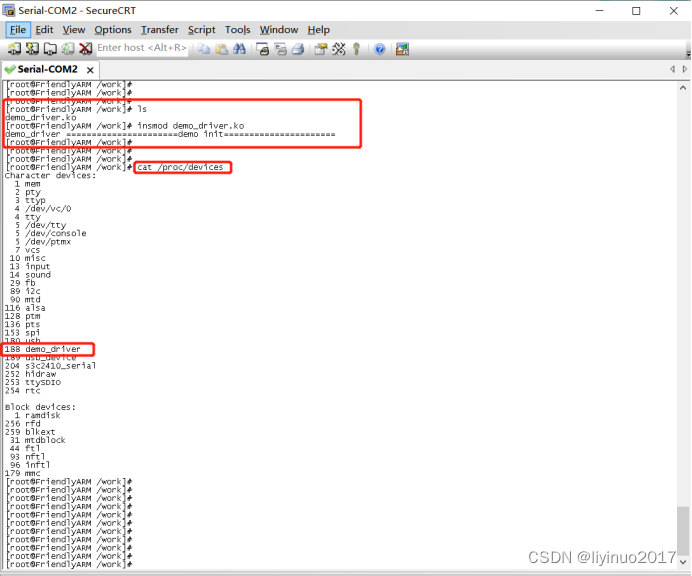
测试结果:编译出来的驱动ko运行正常。
单编KO的模式如下:
本文描述了liunx驱动ko的编译的两种方法:整编内核 和单编KO 。 并重点描述了单编ko的实现方法和优势。
创作不易希望朋友们点赞,转发,评论,关注。
您的点赞,转发,评论,关注将是我持续更新的动力
作者:李巍
Github:liyinuoman2017
CSDN:liyinuo2017
今日头条:程序猿李巍

我正在学习如何使用Nokogiri,根据这段代码我遇到了一些问题:require'rubygems'require'mechanize'post_agent=WWW::Mechanize.newpost_page=post_agent.get('http://www.vbulletin.org/forum/showthread.php?t=230708')puts"\nabsolutepathwithtbodygivesnil"putspost_page.parser.xpath('/html/body/div/div/div/div/div/table/tbody/tr/td/div
总的来说,我对ruby还比较陌生,我正在为我正在创建的对象编写一些rspec测试用例。许多测试用例都非常基础,我只是想确保正确填充和返回值。我想知道是否有办法使用循环结构来执行此操作。不必为我要测试的每个方法都设置一个assertEquals。例如:describeitem,"TestingtheItem"doit"willhaveanullvaluetostart"doitem=Item.new#HereIcoulddotheitem.name.shouldbe_nil#thenIcoulddoitem.category.shouldbe_nilendend但我想要一些方法来使用
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
给定这段代码defcreate@upgrades=User.update_all(["role=?","upgraded"],:id=>params[:upgrade])redirect_toadmin_upgrades_path,:notice=>"Successfullyupgradeduser."end我如何在该操作中实际验证它们是否已保存或未重定向到适当的页面和消息? 最佳答案 在Rails3中,update_all不返回任何有意义的信息,除了已更新的记录数(这可能取决于您的DBMS是否返回该信息)。http://ar.ru
我在我的项目目录中完成了compasscreate.和compassinitrails。几个问题:我已将我的.sass文件放在public/stylesheets中。这是放置它们的正确位置吗?当我运行compasswatch时,它不会自动编译这些.sass文件。我必须手动指定文件:compasswatchpublic/stylesheets/myfile.sass等。如何让它自动运行?文件ie.css、print.css和screen.css已放在stylesheets/compiled。如何在编译后不让它们重新出现的情况下删除它们?我自己编译的.sass文件编译成compiled/t
我正在寻找执行以下操作的正确语法(在Perl、Shell或Ruby中):#variabletoaccessthedatalinesappendedasafileEND_OF_SCRIPT_MARKERrawdatastartshereanditcontinues. 最佳答案 Perl用__DATA__做这个:#!/usr/bin/perlusestrict;usewarnings;while(){print;}__DATA__Texttoprintgoeshere 关于ruby-如何将脚
Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
在选择我想要运行操作的频率时,唯一的选项是“每天”、“每小时”和“每10分钟”。谢谢!我想为我的Rails3.1应用程序运行调度程序。 最佳答案 这不是一个优雅的解决方案,但您可以安排它每天运行,并在实际开始工作之前检查日期是否为当月的第一天。 关于ruby-如何每月在Heroku运行一次Scheduler插件?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/8692687/
我有一个对象has_many应呈现为xml的子对象。这不是问题。我的问题是我创建了一个Hash包含此数据,就像解析器需要它一样。但是rails自动将整个文件包含在.........我需要摆脱type="array"和我该如何处理?我没有在文档中找到任何内容。 最佳答案 我遇到了同样的问题;这是我的XML:我在用这个:entries.to_xml将散列数据转换为XML,但这会将条目的数据包装到中所以我修改了:entries.to_xml(root:"Contacts")但这仍然将转换后的XML包装在“联系人”中,将我的XML代码修改为
我有一大串格式化数据(例如JSON),我想使用Psychinruby同时保留格式转储到YAML。基本上,我希望JSON使用literalstyle出现在YAML中:---json:|{"page":1,"results":["item","another"],"total_pages":0}但是,当我使用YAML.dump时,它不使用文字样式。我得到这样的东西:---json:!"{\n\"page\":1,\n\"results\":[\n\"item\",\"another\"\n],\n\"total_pages\":0\n}\n"我如何告诉Psych以想要的样式转储标量?解