只要是使用Android Camera2开发相机相关功能的小伙伴,必然会和相机数据打交道吧。本文不讲解相机相关的操作,只是详细地讲解得到相机图像后,如何将图像Image转成NV21/NV12的数据的。
你可能会说,这个问题很普通了,网上都有现成的代码,拿过来直接用就行了~然而网上的代码大多数(最少我找到的)都是存在一定错误(或者是性能过低)。你是否存在如下问题?
是否遇到转成的NV21数据转成RGB可用,但是在使用OpenGL绘制图像时得不到正确纹理?转成的NV21数据在Java里可用,在Jni里却挂掉了?
是否遇到图像数据用的好好的,换一个图像分辨率代码就失效了?
这些都是我遇到的一些坑了,肯定有小伙伴也遇到了相同的问题,就比如这个老外兄弟(他的提问下采纳的答案其实还是有问题的,本文会在后面讲解):
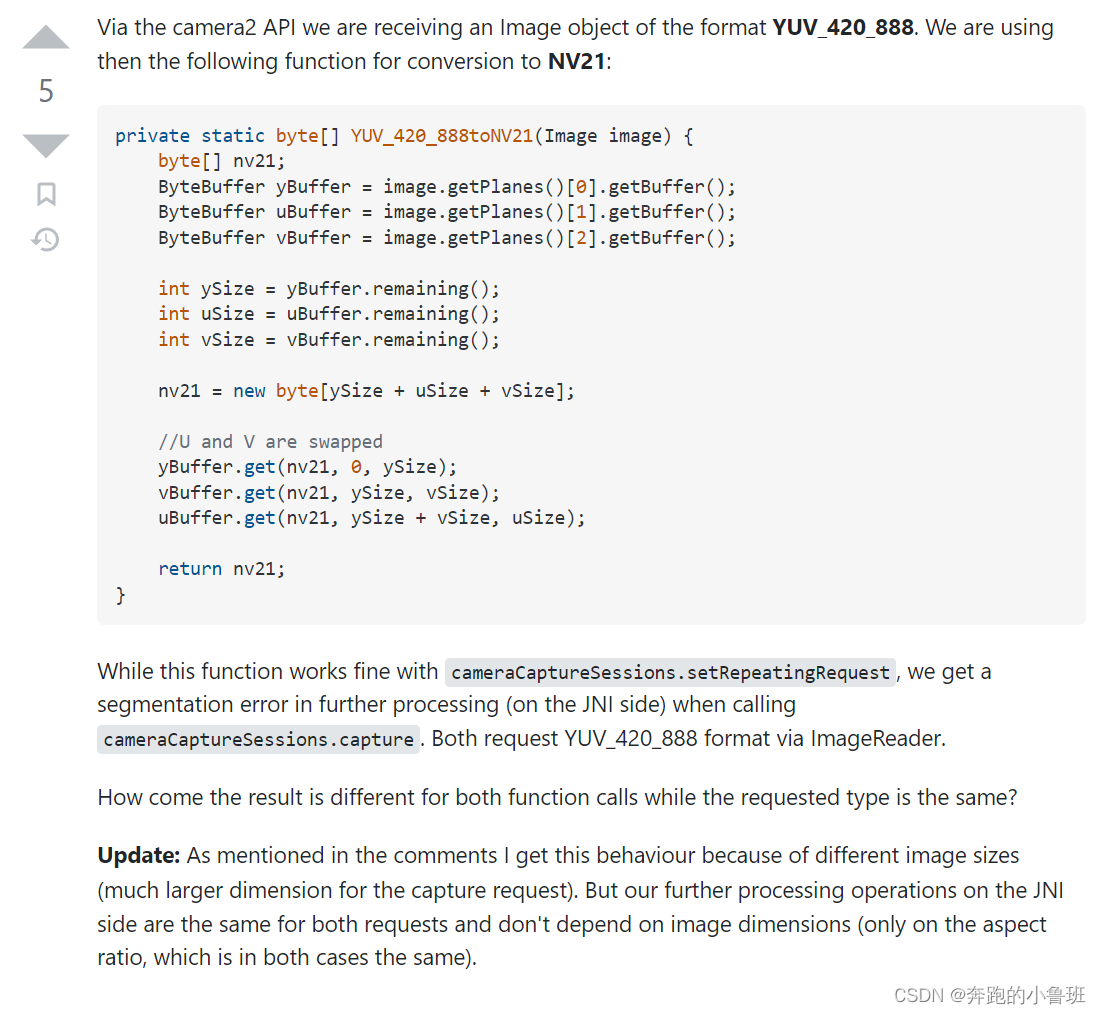
直接说结论:网上的很多YUV_420_888转NV21的代码是错误的~有一些没有考虑图像的padding,导致图像分辨率改变,得到的NV21数据就不适用了。有的代码得到的NV21数据多了w*h/4 字节的数据,导致在一些算法中处理该数据会有越界的问题。因为我做项目的过程中,最开始也是拿来主义,直接在网上copy现成的代码。虽然刚开始没问题,但是程序遇到问题,反过来排查才发现其实得到的NV21数据是不正确的。经过自己修改,得到了一个性能和正确性都没问题的算法。
为了知道网上的一些代码错在哪里,何时有问题,就要彻底了解NV21以及YUV_420_888图像的格式的原理,然后读懂代码,最后得到最优的正确的代码。本文就按这个思路:首先讲解NV21以及YUV_420_888图像的格式的原理,然后去看网上流传的代码,他们为何不对?最后给出自己的代码。如果只想要正确代码的朋友直接请拖到文末~
为什么要讲解这两个格式呢?因为Android camera2 Api主推的图像格式就是这两种,在调用相机的过程,首先通过函数注册:
mImageReader = ImageReader.newInstance(mPreviewSize.getWidth(), mPreviewSize.getHeight(),
ImageFormat.YUV_420_888, 2);
然后在相机的回调函数中就得到了数据类型为YUV420888的Image。Android中对图像数据的处理一般都是用NV21的,所以此时就需要将YUV420888类型的Image转成NV21类型的byte数组了。
YUV_420_888这种图像的格式使用3个独立的Buffer表示,这三个Plane分别是代表Y,U,V三个平面,每个平面还有rowStride、pixelStride对应的属性。要读懂代码,必须了解这些属性的含义~
(1) pixelStride(通过getPixelStride()获得)
像素步长,有可能是1、有可能是2。它代表的是行内连续两个颜色值之间的距离(步长)。
这里还有个重要的点:假如是步长为2,意味索引间隔的原色才是有效的元素,中间间隔的元素其实是没有意义的。而Android中确实也是这么做的,比如某个plane[1](U分量)的步长是2,那么数组下标0,2,4,6,…的数据就是U分量的,而中间间隔的元素Android会补上V分量,也就是会是UVUVUV…这样去分布。但是当最后一个U分量出现后,最后一个没有意义的元素Android就不补了,也就是最后的V分量就不会补了,即是这样分布:UVUVUV…UVUVU。
(2) rowStride(通过getRowStride()获得)
存储这个图像时,每行数据的宽度。这个和图像的宽不是一回事。由于系统的硬件等各方面的原因,存储数据的时候可能需要对齐,比如图像的宽为98字节,但是实际存储的过程中一行图像数据可能用了100字节。那么此时image.rowStride=100,而image.getWidth=98。我们并不能断定图像的宽一定等于rowStride!有些算法就是基于这个前提去处理,所以导致某些分辨率的图像转成NV21数组就不正确了,这个我们后文会有讲解。
YUV_420_888的存储又分YUV420分为Planar格式(P)和Semi-Planar格式(SP)两大类,最主要的区别是:
Planar格式(P)按平面分开放,先把U存放完后,再存放V。U是连续的,V也是连续的
即:YYYYYUUUUUVVVV
Semi-Planar格式(SP)只有Y数据一个平面,UV数据合用一个平面。
即:YYYYYUVUVUV…
注意这一点,在使用Android Api以下函数时,得到的平面式SP格式的:
mImageReader = ImageReader.newInstance(mPreviewSize.getWidth(), mPreviewSize.getHeight(),
ImageFormat.YUV_420_888, 2);
对于SP格式,得到的图像有两种典型类型:rowStride = Width的,(以6*4的图像进行说明)即:

另一种是rowStride != Width的,即:
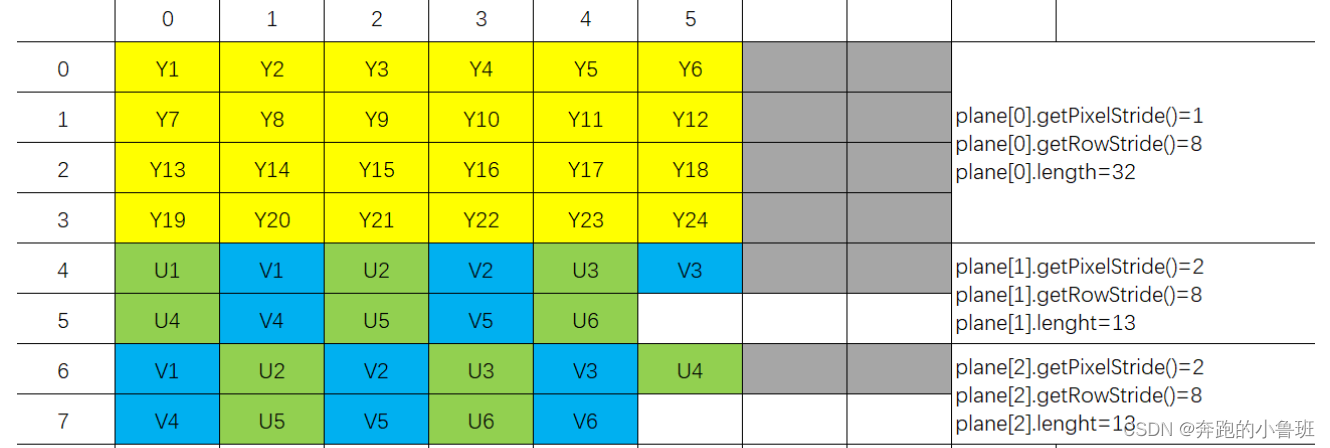
图片来自另一个博主,链接在后面,大家可以过去看一下哦,他写的很好~
我们现在了解了YUV_420_888图像的格式,现在我们要将它转换成NV21的byte数组。NV21的数组有什么特点呢,简单的说就是一个byte数组,先依次保存图像所有像素点的Y值,再交替保存V值和U值。以64的图像进行说明,NV21图像由64个Y值,6个V值和6个U值,一共有36个值。(不要以为看图像以为数组有48个值,上图表示的是Y,U,V三个平面是如何存放的,其中U平面和V平面是数据有重复,当我们提取数组时,是要去掉重复的数据部分的)。严格的NV21图像数据的长度为图像的 (长×宽×3/2),所以如果你的算法得出的数组长度都不满足,那这个数据一定是不正确的(有时候可能把不正确的数据拿去处理效果还是正确的,那是因为算法可能没有使用到你给到的冗余数据,但是在其它算法中,这个数组可能会导致程序异常)!
所以我们目标很明确了对吧,要将Image通过上述的api,提取处它的y,u,v分量,然后把他们按照nv21的格式组成数组就可以了!(小伙伴们可以自己在网上了解一下NV21以及YV420数据的格式的更具体的讲解,这里就不赘述了~)
下面开始代码分析,列举网上你最容易搜到的yuv420转NV21的代码,告诉你它们为什么不正确。
首先是这一段代码,来自YUV_420_888toNV21代码一,这个代码很多地方都能搜到。
private static byte[] YUV_420_888toNV21(Image image) {
byte[] nv21;
ByteBuffer yBuffer = image.getPlanes()[0].getBuffer();
ByteBuffer uBuffer = image.getPlanes()[1].getBuffer();
ByteBuffer vBuffer = image.getPlanes()[2].getBuffer();
int ySize = yBuffer.remaining();
int uSize = uBuffer.remaining();
int vSize = vBuffer.remaining();
//错误点一,nv21数组大小不对。
nv21 = new byte[ySize + uSize + vSize];
//错误点二,没有考虑padding的情况。
yBuffer.get(nv21, 0, ySize);
vBuffer.get(nv21, ySize, vSize);
uBuffer.get(nv21, ySize + vSize, uSize);
return nv21;
}
首先说错误点一:nv21数组的大小不对。首先nv21图像数组的长度一定是长×宽×3/2,其中y数据的大小是长×宽(因为每个像素都有一个y值),接着所有像素的u,v值总共有(长×宽×1/2)个。我们通过image.getPlanes()[1].getBuffer()得到的Plane就是一个包含像素所有u,v值的缓存区域,它的大小就是长×宽×1/2,明白了吗?所以nv21的数据大小其实就是ySize + uSize,当然也可以是ySize+vSize。这里数据大小不对。代码中uBuffer.get(nv21, ySize + vSize, uSize)是多余的。vBuffer已经代表是像素中所有像素按照v,u,v,u,排序的结果了,我们直接将它放在y数据后边就是nv21的数据了。所以这一步多余且导致数组大小多了长×宽×1/2个值。
错误点二,在图像没有padding的情况下,我们只用通过这两步就ok可以得到结果,但是如果数据有padding呢?这样的话数据不但多了长×宽×1/2的数据,还多了padding的数据?大家能明白吗?这个yBuffer,vBuffer和uBuffer是一组可能包含了padding的数据,我们要根据去判断rowStride是否等于Width来处理,如果等于,那么没问题;如果不等于,那么你要去除掉padding,得到真正的buffer,再进行处理。
yBuffer.get(nv21, 0, ySize);
vBuffer.get(nv21, ySize, vSize);
private static byte[] YUV_420_888toNV21_fix(Image image) {
byte[] nv21;
ByteBuffer yBuffer = yBufferWithoutPadding(image.getPlanes()[0].getBuffer());
ByteBuffer vBuffer = uBufferWithoutPadding(image.getPlanes()[2].getBuffer());
int ySize = yBuffer.remaining();
int vSize = uBuffer.remaining();
nv21 = new byte[ySize + vSize];
yBuffer.get(nv21, 0, ySize);
vBuffer.get(nv21, ySize, vSize);
return nv21;
}
所以如果是得到NV21的数据,我们不需要使用u平面(image.getPlanes()[1]),因为v平面就是包含了图像所有像素vuvuvu的一组buffer。此外,我们需要得到真正的,去掉padding的buffer。
这段代码分析完了,其实已经有老哥遇到相同的问题,他就是使用这段代码,随后在某些地方遇到了问题,然后发帖求助了:使用以上代码会遇到的问题
在这个帖子中,歪果小哥哥也很热心地帮他分析了,并给上了自己代码,我在这里贴出来!通过这个代码是可以得到正确的NV21的数组的。然而里面依然存在逻辑错误,并且它是逐像素处理的,对于一个1280*720的图像,在我的手机上尝试的,一帧图像的处理时间直接从2ms上升至14ms,这显然无法接受。下面贴一下他的代码。
private static byte[] YUV_420_888toNV21(Image image) {
int width = image.getWidth();
int height = image.getHeight();
int ySize = width*height;
int uvSize = width*height/4;
byte[] nv21 = new byte[ySize + uvSize*2];
ByteBuffer yBuffer = image.getPlanes()[0].getBuffer(); // Y
ByteBuffer uBuffer = image.getPlanes()[1].getBuffer(); // U
ByteBuffer vBuffer = image.getPlanes()[2].getBuffer(); // V
int rowStride = image.getPlanes()[0].getRowStride();
assert(image.getPlanes()[0].getPixelStride() == 1);
int pos = 0;
//part1: 判断了是否存在padding,然后相应地处理
if (rowStride == width) {
yBuffer.get(nv21, 0, ySize);
pos += ySize;
}
else {
long yBufferPos = -rowStride;
for (; pos<ySize; pos+=width) {
yBufferPos += rowStride;
yBuffer.position(yBufferPos);
yBuffer.get(nv21, pos, width);
}
}
rowStride = image.getPlanes()[2].getRowStride();
int pixelStride = image.getPlanes()[2].getPixelStride();
assert(rowStride == image.getPlanes()[1].getRowStride());
assert(pixelStride == image.getPlanes()[1].getPixelStride());
//part2:判断是否有padding,对uv分量做处理。
if (pixelStride == 2 && rowStride == width && uBuffer.get(0) == vBuffer.get(1)) {
byte savePixel = vBuffer.get(1);
try {
//part2.1 判断uv两个buffer是否重叠,如果是重叠,就直接赋值:
vBuffer.put(1, (byte)~savePixel);
if (uBuffer.get(0) == (byte)~savePixel) {
vBuffer.put(1, savePixel);
vBuffer.position(0);
uBuffer.position(0);
//part2.3 认为uv重叠,直接从缓存区赋值
vBuffer.get(nv21, ySize, 1);
uBuffer.get(nv21, ySize + 1, uBuffer.remaining());
return nv21;
}
}
catch (ReadOnlyBufferException ex) {
}
vBuffer.put(1, savePixel);
}
//part2.3 判断uv两个buffer是否重叠,如果不重叠,就逐像素处理
for (int row=0; row<height/2; row++) {
for (int col=0; col<width/2; col++) {
int vuPos = col*pixelStride + row*rowStride;
nv21[pos++] = vBuffer.get(vuPos);
nv21[pos++] = uBuffer.get(vuPos);
}
}
return nv21;
}
首先呢,闻到了什么code smell了吗?学习我这篇代码重构–代码臃肿的小伙伴,一看到这个代码就皱眉头吧,就很难读懂。代码中使用了过多的参数,有着基本类型偏执的问题。建议使用提炼函数法和以查询代替临时变量法减少一下参数和方法。(忍不住讲了一下代码重构,因为这样的代码看着确实不爽,有兴趣学习代码重构的小伙伴可以看我的代码重构系列教程)
其实这个代码无非就是要判断存在padding,如果不等于,说明有padding,接着去除padding,再给nv21数组赋值接好了对吧。让我们一起看一下这一段代码的问题所在~
首先看代码part1部分,如果所说,要先判断是否存在padding,然后做相应处理,它这里确实是判断了,如果存在了padding,就去除padding后把y分量的值赋给nv21数组。这里虽然啰嗦,单代码逻辑正确~
首先看代码part2部分略微复杂。根据Android官方文档,其实u,v两个buffer中的数据就是uv数据交替的,我们在上面已经讲过了。但是这个博主显然忽略了这一点,它去判断u,v分量的缓存区是否重叠。也就是他在判断u[0]和v[1],v[0]和u[1]是不是同一块内存,他认为如果是同一块内存才说明uv交替,然后就可以直接赋值,否则他就逐像素区取u,v的值。
然而实际情况是,u[0]和v[1]并不是同一块内存,但是他们的值是相同的,所以我们是没必要逐像素去做的。根据这个代码的逻辑,他的判断结果总是为false,所以他总是逐像素去做了。当然是可以得到正确的结果的,但是处理时间直接巨幅增加。
再注意par2.3部分,虽然根据以上分析,他总是逐像素处理了,这里不会运行到,但是假设它运行到这里,他的处理逻辑也有问题?你有发现吗?他没有考虑padding的情况。对于y分量他都考虑了,对于uv分量他又忘记考虑了,如果是代码运行到这里,并且图像存在padding,程序会直接crash。
核心部分,就根据我上面的伪代码,给一个我最后的实现吧。
//Planar格式(P)的处理
private static ByteBuffer getuvBufferWithoutPaddingP(ByteBuffer uBuffer,ByteBuffer vBuffer, int width, int height, int rowStride, int pixelStride){
int pos = 0;
byte []byteArray = new byte[height*width/2];
for (int row=0; row<height/2; row++) {
for (int col=0; col<width/2; col++) {
int vuPos = col*pixelStride + row*rowStride;
byteArray[pos++] = vBuffer.get(vuPos);
byteArray[pos++] = uBuffer.get(vuPos);
}
}
ByteBuffer bufferWithoutPaddings=ByteBuffer.allocate(byteArray.length);
// 数组放到buffer中
bufferWithoutPaddings.put(byteArray);
//重置 limit 和postion 值否则 buffer 读取数据不对
bufferWithoutPaddings.flip();
return bufferWithoutPaddings;
}
//Semi-Planar格式(SP)的处理和y通道的数据
private static ByteBuffer getBufferWithoutPadding(ByteBuffer buffer, int width, int rowStride, int times,boolean isVbuffer){
if(width == rowStride) return buffer; //没有buffer,不用处理。
int bufferPos = buffer.position();
int cap = buffer.capacity();
byte []byteArray = new byte[times*width];
int pos = 0;
//对于y平面,要逐行赋值的次数就是height次。对于uv交替的平面,赋值的次数是height/2次
for (int i=0;i<times;i++) {
buffer.position(bufferPos);
//part 1.1 对于u,v通道,会缺失最后一个像u值或者v值,因此需要特殊处理,否则会crash
if(isVbuffer && i==times-1){
width = width -1;
}
buffer.get(byteArray, pos, width);
bufferPos+= rowStride;
pos = pos+width;
}
//nv21数组转成buffer并返回
ByteBuffer bufferWithoutPaddings=ByteBuffer.allocate(byteArray.length);
// 数组放到buffer中
bufferWithoutPaddings.put(byteArray);
//重置 limit 和postion 值否则 buffer 读取数据不对
bufferWithoutPaddings.flip();
return bufferWithoutPaddings;
}
private static byte[] YUV_420_888toNV21(Image image) {
int width = image.getWidth();
int height = image.getHeight();
ByteBuffer yBuffer = getBufferWithoutPadding(image.getPlanes()[0].getBuffer(), image.getWidth(), image.getPlanes()[0].getRowStride(),image.getHeight(),false);
ByteBuffer vBuffer;
//part1 获得真正的消除padding的ybuffer和ubuffer。需要对P格式和SP格式做不同的处理。如果是P格式的话只能逐像素去做,性能会降低。
if(image.getPlanes()[2].getPixelStride()==1){ //如果为true,说明是P格式。
vBuffer = getuvBufferWithoutPaddingP(image.getPlanes()[1].getBuffer(), image.getPlanes()[2].getBuffer(),
width,height,image.getPlanes()[1].getRowStride(),image.getPlanes()[1].getPixelStride());
}else{
vBuffer = getBufferWithoutPadding(image.getPlanes()[2].getBuffer(), image.getWidth(), image.getPlanes()[2].getRowStride(),image.getHeight()/2,true);
}
//part2 将y数据和uv的交替数据(除去最后一个v值)赋值给nv21
int ySize = yBuffer.remaining();
int vSize = vBuffer.remaining();
byte[] nv21;
int byteSize = width*height*3/2;
nv21 = new byte[byteSize];
yBuffer.get(nv21, 0, ySize);
vBuffer.get(nv21, ySize, vSize);
//part3 最后一个像素值的u值是缺失的,因此需要从u平面取一下。
ByteBuffer uPlane = image.getPlanes()[1].getBuffer();
byte lastValue = uPlane.get(uPlane.capacity() - 1);
nv21[byteSize - 1] = lastValue;
return nv21;
}
首先函数的主体是YUV_420_888toNV21,其实主要就是包含三个部分,代码中的注释已经给出了:
part 1: 获得真正的消除padding的ybuffer和ubuffer。
part 2: 将y数据和uv的交替数据(除去最后一个v值)赋值给nv21。
part 3: 最后一个像素值的u值是缺失的,因此需要从u平面取一下。
part 1部分的part1.1部分解释一下, 是因为我们逐行取出带有padding的缓存图像的时候,对于ubffer和vbuffer的最后一行,它是缺失掉一个像素点的。我上文也提到了:**“但是当最后一个U分量出现后,最后一个没有意义的元素Android就不补了,也就是最后的V分量就不会补了”**从我上面给的图中也能看出:

所以在part1.1赋值的地方,对于vbuffer的最后一行赋值的width要减1,否则是会数组越界的。
part2部分没什么要说的。
part3和part1.1部分呼应,因为我们对于vbuffer的最后一行赋值的时候是缺失一个点的,所以我们这里要从ubuffer取出这个点,然后补充进去。当然你不补也没关系,默认是0。对于一个图像,这一个点显得微不足道。
如我的代码重构教程所说,好的代码必须配合测试用例。我这里的测试用例就是获取到的相机支持的分辨率列表,大概有17个。经过本人测试,都可以通过这一段代码得到正确的nv21数据。另外,我这一段代码中我认为还是有很多基本数据类型,犯了基本数据类型偏执错误的,是可以进行重构的。日后我回来重构一下~
其实YUV420_888转NV21看似简单,但是实际需要处理一些边界情况。网上的代码参差不齐,有的只是“看似”正确,实际可能会出各种问题。我写这个文章首先是帮大家避免一下坑吧,毕竟有可能自己在网上找到了这个代码,却不知道代码存在问题。另一个目的也就是希望大家能够自己理解这两种数据格式,读懂代码,这样才能在遇到问题和变化的时候从容应对。
电脑0x0000001A蓝屏错误怎么U盘重装系统教学分享。有用户电脑开机之后遇到了系统蓝屏的情况。系统蓝屏问题很多时候都是系统bug,只有通过重装系统来进行解决。那么蓝屏问题如何通过U盘重装新系统来解决呢?来看看以下的详细操作方法教学吧。 准备工作: 1、U盘一个(尽量使用8G以上的U盘)。 2、一台正常联网可使用的电脑。 3、ghost或ISO系统镜像文件(Win10系统下载_Win10专业版_windows10正式版下载-系统之家)。 4、在本页面下载U盘启动盘制作工具:系统之家U盘启动工具。 U盘启动盘制作步骤: 注意:制作期间,U盘会被格式化,因此U盘中的重要文件请注
文章目录一、项目场景二、基本模块原理与调试方法分析——信源部分:三、信号处理部分和显示部分:四、基本的通信链路搭建:四、特殊模块:interpretedMATLABfunction:五、总结和坑点提醒一、项目场景 最近一个任务是使用simulink搭建一个MIMO串扰消除的链路,并用实际收到的数据进行测试,在搭建的过程中也遇到了不少的问题(当然这比vivado里面的debug好不知道多少倍)。准备趁着这个机会,先以一个很基本的通信链路对simulink基础和相关的debug方法进行总结。 在本篇中,主要记录simulink的基本原理和基本的SISO通信传输链路(QPSK方式),计划在下篇记
一.计算机组成原理 这本书利用组合逻辑、同步时序逻辑电路设计的相关知识,从逻辑门开始逐步构建运算器、存储器、数据通路和控制器,最终集成为完整的CU原型系统,使读者从设计者的角度理解计算机部件构成及运行的基本原理,掌握软硬件协同的概念。 全书共9章,主要内容包括计算机系统概述、数据信息的表示、运算方法与运算器、存储系统、指令系统、中央处理器、指令流水线、总线系统、输入输出系统。1.计算机系统概述1.1计算机发展历程 计算机是一种能够按照事先存储的程序,自动、高速、准确地对相关信息进行处理的电子设备。1946年2月,世界上第一台电子数字计算机ENIAC(ElectronicNum
首先打开环境 查看源码发现有个base64解开后发现是图片源码这让我联想到地址栏中的参数 发现它经过了两次base64编码和一次十六进制编码Base64在线编码解码|Base64加密解密-Base64.usCTF在线工具-Hex在线编码|Hex在线解码|十六进制编码转换(hiencode.com) 解开后发现是图片名 我们反向操作一波查看index.php的源码 696e6465782e706870TmprMlpUWTBOalUzT0RKbE56QTJPRGN3下面传参 进行base64解密 得到源码';die("xixi~noflag");}else{$txt=base64_encod
我将向您展示我的应用程序的一小部分,我想知道哪种方法是放置我正在处理的条件的正确方法。如果我将向您展示的两种方式都是正确的,我希望您能告诉我后果/逆境if((some.thing===''||0)||(some.how===''||0)){//somethingisgoingonhere}到目前为止我就是这样,有什么不好的地方吗?或者应该这样更好:if((some.thing===''||some.thing===0)||(some.how===''||some.how===0)){//somethingisgoingonhere}那么你有什么建议呢?最后结果一样吗?编辑添加另一种方式
我想弄清楚为什么图表中的值显示不正确。当我在循环时记录learningLanguages[j].count++的值时,它们是准确的。但是,当我在图表$.map(nativeLanguages,function(n){...})的map函数中记录n时,计数都不正确(并且看似随意)vargetLanguages=$.get('/languages.json',function(languages){//toplevellanguagearrayslearningLanguages=[]nativeLanguages=[]//objectconstructorthatcorrectlyfor
在试图完全理解相等运算符和恒等运算符之间的区别时,我遇到了一个article在MSDN上,从内部工作原理的Angular解释了它们的作用,但我仍然有一些疑问,并决定创建一个流程图,以便更好地了解情况。现在我的问题是,这个流程图正确吗?还是我错过了什么?据我所知,恒等运算符(===)的工作方式几乎相同,但不会在第一步中尝试将A和B转换为bool值、数字或字符串。对吗?可以看到图片here也是:好的,这是真实的,这是原则问题;) 最佳答案 isthisflowchartcorrect?没有。您应该为AbstractEqualityCom
一、简介1.1Flyway是什么?Flyway是一款开源的数据库版本管理工具,可以实现管理并跟踪数据库变更,支持数据库版本自动升级,而且不需要复杂的配置,能够帮助团队更加方便、合理的管理数据库变更。例:创建两个sql变更文件,项目启动后会将两个文件中的sql语句全部执行。1.2为什么使用Flyway?简单举个例子:开发时,如果A开发和B开发都对同一数据库进行了修改,那么如何进行数据同步呢?假如多个开发人员都修改了sql脚本,怎么同步到测试环境和生产环境?类似于以上的情况在日常开发中不胜枚举,在最开始的单体架构中,我们公司采用了通过校验数据库版本号来实现sql的变更,这虽然能够解决大部分问题,但
由于出色的并发原语,我目前正在使用go来实现游戏服务器。这一切都轻而易举地实现并且非常可靠地工作。虽然我主要来自Java背景,但我很难忘记Java的类型层次结构。我需要一组游戏对象,它们都共享相似的数据结构,如位置、速度等,但它们在更新方法或特殊字段中可能都有不同的行为以允许不同的功能。最初我有一个包含所有共享数据的结构,每个自定义类型都会嵌入该结构。问题在于使用数据结构进行组织。我使用四叉树来通知客户附近对象的状态。这样我就可以将树传递给每个游戏对象的嵌入式结构的指针,并且一切正常。问题是一旦我查询了四叉树,我就无法访问包含的类型。例如,typeGameObjectstruct{Po
我有一个循环,显然在该函数的底部附近导致了数据竞争,我将其标记为:func(p*PartialParty)SendReadyCheck(partyPartialParty){msg,err:=json.Marshal(&ReadyCheckMsg{"ReadyCheck",""})iferr!=nil{log.Println(err)}for_,member:=rangeparty.Members{member.Conn.send>>>for_,member:=rangeparty.Members{***这显然与此冲突://AddNewMemberwilladdanewusertoth