文章目录
可用参考源:
方法:
所需设备:
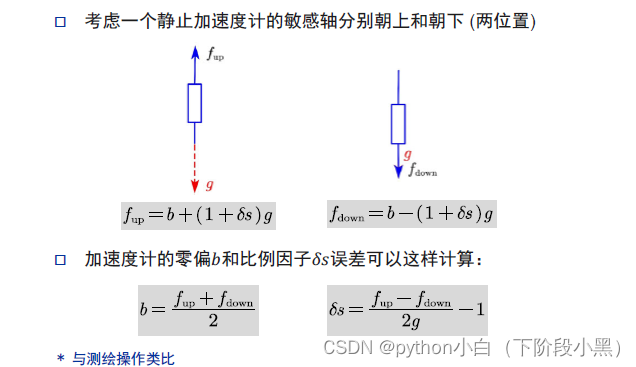
需要说明的是,以fup为例,加速度计敏感轴朝上,说明以上为正,根据比力方程,f=a-g,在静止时,a=0,因此f=-g,由于g的方向是向下的,而前面有一个负号,因此f的方向就是向上的;同理,也能根据加速度计的测量模型列出朝下时候的测量值fdown,两者可组合计算出加速度计的零偏和比例因子误差
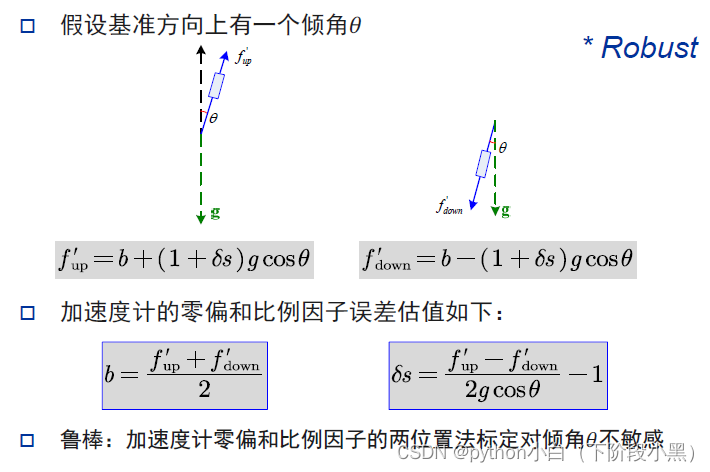
由下图示例可知,两位置法静态标定具有一定的鲁棒性,也就是在加速度计轴偏移小角度的时候,对结果几乎没影响
六位置法标定算法是利用最小二乘进行解算的


当然还有十二位置法,就是当没有一个较理想的水平面放置传感器时,就可以一个朝向,镜像测两次,求平均作为这个面的最终测量值,以此抵消放置面倾斜引起的干扰
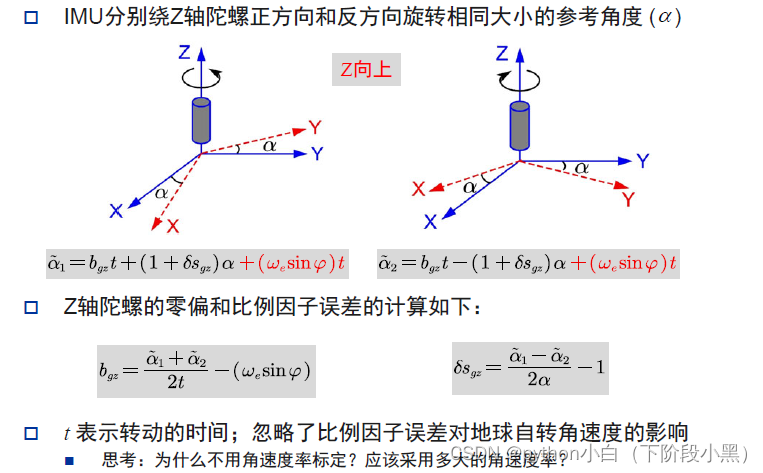
由上图中的公式做一下说明:
1.对于陀螺输出的公式中,我们是直接列出平台角速度积分与陀螺角速度积分的关系的,也就是平台旋转的角度与陀螺输出的角度,进行量测模型建立的
2.地球自转在Z轴投影始终是正的
3.之所以列出角度的一个式子,是出于工程原因,因为角度的转台很便宜,精度也很高;而要达到所需的角速率的状态,价格很昂贵,因此直接考虑角速度的积分,也就是角度即可
4.正反转的积分时间一定要保持相同,这样才能抵消掉零偏的影响
标定的精度依赖于各轴相对于参考坐标对准的准确
性。
为了获得准确的标定结果,需要一些专业设备(如
转台或规则的立方体)来获得IMU的精确姿态和旋
转角。
由于对专业设备的依赖性,这些标定方法主要设计
用于实验室测试、厂家校准和对较高精度的IMU的
标定。
系统级标定
我正在尝试将全局导航菜单项添加到我的ActiveAdmin安装(在“仪表板”导航按钮旁边)。ActiveAdmin说这在他们的网站上是可能的,但他们没有任何关于如何实现它的文档。有谁知道如何做到这一点?编辑:抱歉,我应该更清楚。我想添加一个指向由任意文本/链接对组成的全局导航的链接。IE,如果我想添加一个链接到http://google.com在事件管理员的全局导航中使用文本“Google”,我将如何实现? 最佳答案 ActiveAdmin.register_page"Google"domenu:priority=>1,:label
伴随农业机械化和智能化的发展,越来越多的人开始使用农机自动驾驶系统助力耕作,千耘农机导航的“星地一体”能力可有效解决信号受限的问题,实现作业提效。究竟什么是“星地一体”,又是如何解决智能化农机作业的痛点的?下面为大家揭秘。农机效率通常受限于通信网络目前虽然我国通讯网络的人口覆盖率达到99%,但地面移动通讯网络覆盖率仍小于国土面积的40%,而很多农田所在区域恰是山区、戈壁滩等偏远地区。两省交界地也会出现通信信号不稳定的状况;而国内大部分农机自动驾驶系统非常依赖通信网络,当通信网络弱的时候会出现系统掉线的现象,必须得携带小基站才能正常使用,极为繁琐。Q:什么是千耘农机导航“星地一体”能力?A:是星
文章目录认识unity打包目录结构游戏逆向流程Unity游戏攻击面可被攻击原因mono的打包建议方案锁血飞天无限金币攻击力翻倍以上统称内存挂透视自瞄压枪瞬移内购破解Unity游戏防御开发时注意数据安全接入第三方反作弊系统外挂检测思路狠人自爆实战查看目录结构用il2cppdumper例子2-森林whoishe后记认识unity打包目录结构dll一般很大,因为里面是所有的游戏功能编译成的二进制码游戏逆向流程开发人员代码被编译打包到GameAssembly.dll中使用il2ppDumper工具,并借助游戏名_Data\il2cpp_data\Metadata\global-metadata.dat
前言 Slowloris攻击是我在李华峰老师的书——《MetasploitWeb 渗透测试实战》里面看的,感觉既简单又使用,现在这种攻击是很容易被防护的啦。不过我也不敢真刀实战的去试,只是拿个靶机玩玩罢了。 废话还是写在结语里面吧。(划掉)结语可以不看(划掉)Slowloris攻击的原理 Slowloris是一种资源消耗类DoS攻击,它利用部分HTTP请求进行操作。也叫做慢速攻击,这里的慢速并不是说发动攻击慢,而是访问一条链接的速度慢。Slowloris攻击的功能是打开与目标Web服务器的连接,然后尽可能长时间的保持这些连接打开。如果由多台电脑同时发起Slo
目录一、原理部分1、什么是串行通信(1)并行通信与串行通信(2)串行通信的制式(3)串行通信的主要方式 2、配置串口(1)SCON和PCON:串行口1的控制寄存器(2)SBUF:串行口数据缓冲寄存器 (3)AUXR:辅助寄存器编辑(4)ES、PS:与串行口1中断相关的寄存器(5)波特率设置 3、串口框架编写二、程序案例一、原理部分1、什么是串行通信(1)并行通信与串行通信微控制器与外部设备的数据通信,根据连线结构和传送方式的不同,可以分为两种:并行通信和串行通信。并行通信:数据的各位同时发送与接收,每个数据位使用一条导线,这种方式传输快,但是需要多条导线进行信号传输。串行通信:数据一位一
俯拍相机中心和吸嘴中心的标定文章目录俯拍相机中心和吸嘴中心的标定前言适用模型如下:一、使用一个标定片进行标定1.关键注意:2.标定步骤:二、使用一个L型的工件1.关键注意:2.标定步骤:总结前言在自动化设备领域,使用相机进行定位是很普遍存在的,而使用相机定位就必定会用到标定,本文介绍两种关于吸嘴上方的俯拍相机和吸嘴中心的标定方法(前提是带有仰拍相机和俯拍相机)。【还有很多相机的使用场景的标定方法将在以后的文章中进行阐述】适用模型如下:一、使用一个标定片进行标定1.关键注意:关键是使用两个相机的中心和识别偏差,得到两个相机的中心固定偏差。注:后续俯拍相机拍物料识别得到的偏差以吸嘴中心在俯拍相机中
相机内参标定,相机和激光雷达联合标定一、相机标定原理1.1成像过程1.2标定详解二、相机和激光雷达联合标定2.1标定方法汇总2.2Autoware的安装与运行2.2.1安装方式2.2.2安装Autoware的依赖(Ubuntu16.04/kinetic)2.2.3编译Autoware1.创造工作空间2.下载Autoware源码3.其他依赖4.编译5.效果2.3Autoware标定激光雷达和相机的外参过程一、相机标定原理1.1成像过程现实物体在相机中的成像过程离不开世界坐标系、相机坐标系、图像坐标系以及像素坐标系,只有理解了这些才能对获取的图像进行准确的分析。成像过程:四个坐标系如下图所示:世界
在railsadmin中,您可以像这样为模型及其子项定义导航标签:#inrails_admin.rbconfig.modelOrderdonavigation_label'Ordersrelated'endconfig.modelOrderProductsdoparentOrderend有没有办法在不创建模型的情况下向导航菜单添加标签(即仅用于分组)? 最佳答案 根据wiki,您可以像这样将静态链接附加到导航:RailsAdmin.configdo|config|config.navigation_static_links={'Go
Ruby2.3.0引入了安全导航语法,它通过引入一个新的运算符来简化链式方法调用的nil处理,该运算符仅在先前语句的值不是nil。这是一个已经存在于C#、Groovy和Swift中的特性。例如inGroovy,语法是foo?.bar这基本上意味着结果值是foo.bar除非foo是null,在这种情况下返回值也是null因此不会抛出异常。还有C#(称为空条件运算符)和Swift(称为可选链接表达式)使用此表示法。所以语法在其他语言中似乎是相当标准的。现在,为什么在Ruby中语法是foo&.bar代替? 最佳答案 此答案基于thedis
我只是习惯了Middleman和一般的ruby。生成具有事件状态的导航的最佳方式是什么? 最佳答案 在当前版本的MM(2.x,尽管3.0接近)中,您可以通过向config.rb添加以下内容并在您的导航文件中进行一些调整来实现。这是aworkingversion以防我遗漏一些关键位:首先创建一个辅助函数:helpersdodefnav_active(page)@page_id==page?{:class=>"Active"}:{}endend然后,在navbarincludefile(在本例中它是一个haml文件)您可以使用nav_a