目录
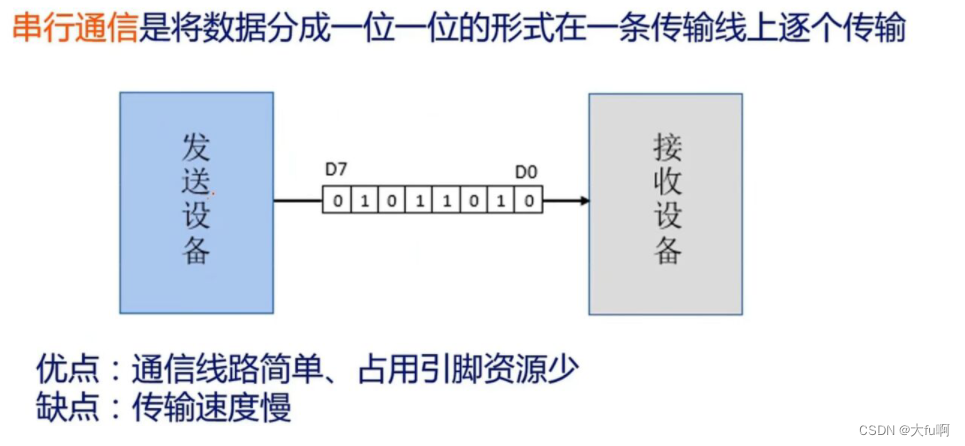
串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方式的扩展接口。串行接口 (Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成本,特别适用于远距离通信,但传送速度较慢。
串行通信分为两种方式:同步串行通信和异步串行通信。
同步串行通信需要通信双方在同一时钟的控制下,同步传输数据,比如:SPI,IIC通信接口。图1所示;
异步串行通信是指通信双方使用各自的时钟控制数据的发送和接收过程,比如:UART(通用异步收发器),图2所示。
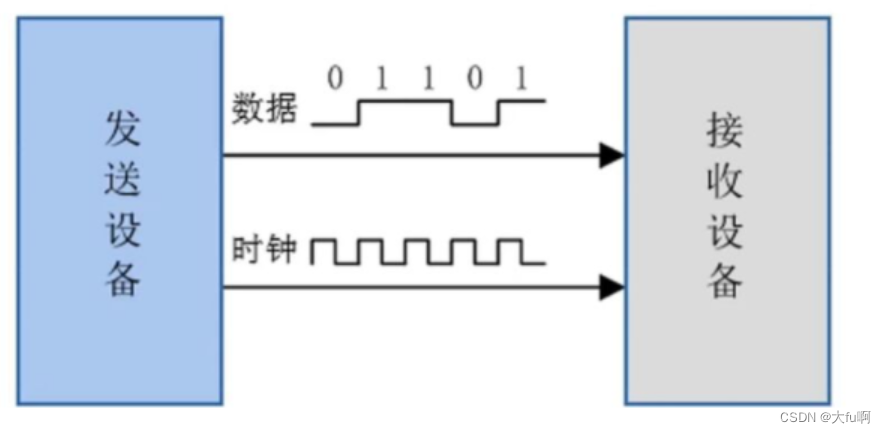
图1同步串行通信
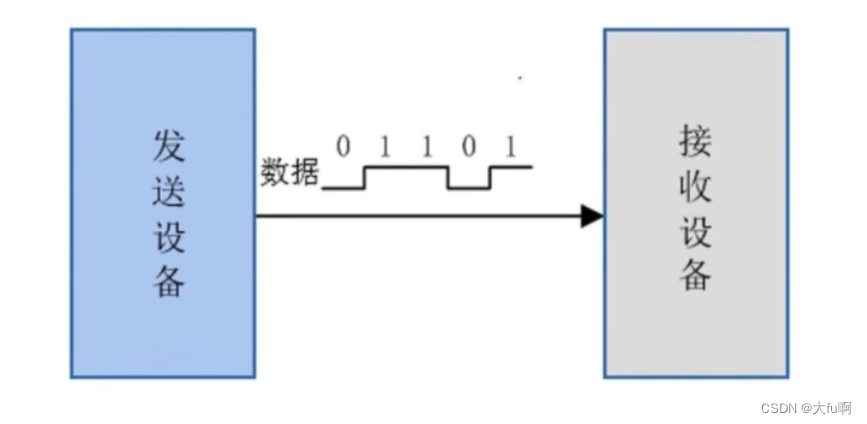
图2异步串行通信
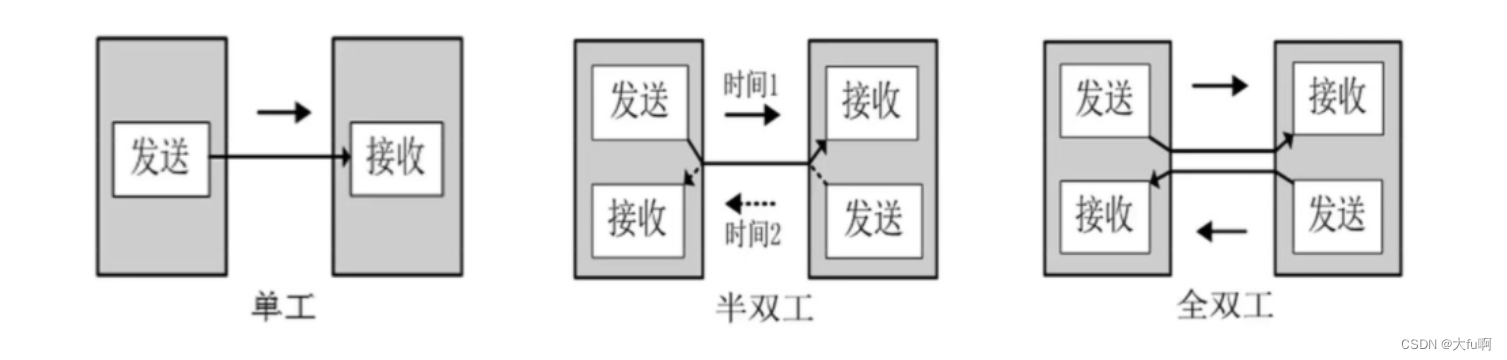
根据串行数据的传输方向,我们可以将通信分为单工,半双工,双工。
单工:是指数据传输仅能沿一个方向,不能实现反向传输。
半双工:是指数据传输可以沿两个方向,但需要分时进行传输。
全双工:是指数据可以同时进行双向传输。
下图是单工、半双工以及全双工的示意图

UART 是一种采用异步串行通信方式的通用异步收发传输器(universal asynchronous receiver-transmitter),它在发送数据时将并行数据转换成串行数据来传输,在接收数据时将接收到的串行数据转换成并行数据。
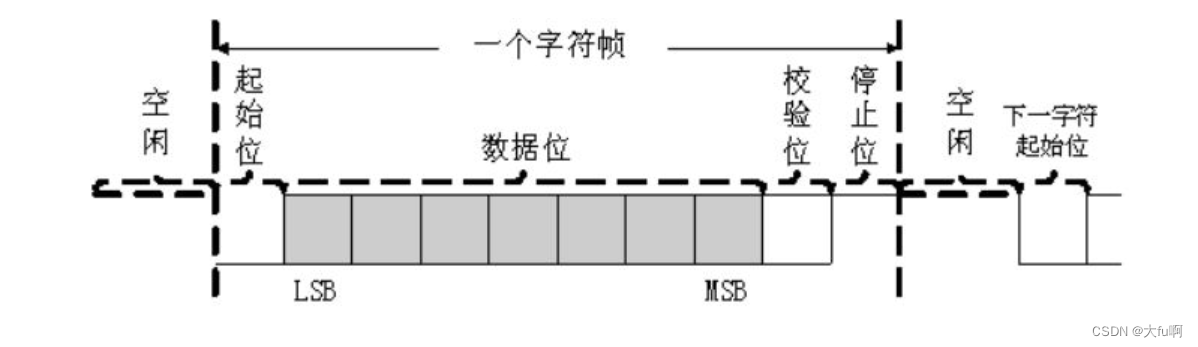
UART 串口通信需要两根信号线来实现,一根用于串口发送,另外一根负责串口接收。UART 在发送或接收过程中的一帧数据由 4 部分组成,起始位、数据位、奇偶校验位和停止位,如图所示。其中,起始位标志着一帧数据的开始,停止位标志着一帧数据的结束,数据位是一帧数据中的有效数据。校验位分为奇校验和偶校验,用于检验数据在传输过程中是否出错。奇校验时,发送方应使数据位中 1 的个数与校验位中 1 的个数之和为奇数;接收方在接收数据时,对 1 的个数进行检查,若不为奇数,则说明数据在传输过程中出了差错。同样,偶校验则检查 1 的个数是否为偶数。
波特率:串行通信的数据是按位进行传送的,一般将机器每秒钟传送的二进制数码的位数称为波特率,单位为bps,即位/秒,比如1秒钟传送1位,就是1波特。用于说明数据传送的快慢。UART 通信过程中的数据格式及传输速率是可设置的,为了正确的通信,收发双方应约定并遵循同样的设置。数据位可选择为 5、6、7、8 位,其中 8 位数据位是最常用的,在实际应用中一般都选择 8 位数据位;校验位可选择奇校验、偶校验或者无校验位;停止位可选择 1 位(默认),1.5 或 2 位。串口通信的速率用波特率表示,它表示每秒传输二进制数据的位数,单位是 bps(位/秒),常用的波特率有 9600、19200、38400、57600 以及 115200 等。
针对异步串行通信的接口标准有RS232、RS422、RS485等

在设置好数据格式及传输速率之后,UART 负责完成数据的串并转换,而信号的传输则由外部驱动电路实现。电信号的传输过程有着不同的电平标准和接口规范,针对异步串行通信的接口标准有 RS232、RS422、RS485 等,它们定义了接口不同的电气特性,如 RS-232 是单端输入输出,而 RS-422/485 为差分输入输出等。
RS232 接口标准出现较早,可实现全双工工作方式,即数据发送和接收可以同时进行。在传输距离较短时(不超过 15m),RS232 是串行通信最常用的接口标准,RS-232 标准的串口最常见的接口类型为 DB9。
module uart_recv(
input sys_clk, //系统时钟
input sys_rst_n, //系统复位,低电平有效
input uart_rxd, //UART接收端口
output reg uart_done, //接收一帧数据完成标志
output reg rx_flag, //接收过程标志信号
output reg [3:0] rx_cnt, //接收数据计数器
output reg [7:0] rxdata,
output reg [7:0] uart_data //接收的数据
);
//parameter define
parameter CLK_FREQ = 50000000; //系统时钟频率
parameter UART_BPS = 115200; //串口波特率
localparam BPS_CNT = CLK_FREQ/UART_BPS; //为得到指定波特率,
//需要对系统时钟计数BPS_CNT次
//reg define
reg uart_rxd_d0;
reg uart_rxd_d1;
reg [15:0] clk_cnt; //系统时钟计数器
//wire define
wire start_flag;
//*****************************************************
//** main code
//*****************************************************
//捕获接收端口下降沿(起始位),得到一个时钟周期的脉冲信号
assign start_flag = uart_rxd_d1 & (~uart_rxd_d0);
//对UART接收端口的数据延迟两个时钟周期
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
uart_rxd_d0 <= 1'b0;
uart_rxd_d1 <= 1'b0;
end
else begin
uart_rxd_d0 <= uart_rxd;
uart_rxd_d1 <= uart_rxd_d0;
end
end
//当脉冲信号start_flag到达时,进入接收过程
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
rx_flag <= 1'b0;
else begin
if(start_flag) //检测到起始位
rx_flag <= 1'b1; //进入接收过程,标志位rx_flag拉高
//计数到停止位中间时,停止接收过程
else if((rx_cnt == 4'd9) && (clk_cnt == BPS_CNT/2))
rx_flag <= 1'b0; //接收过程结束,标志位rx_flag拉低
else
rx_flag <= rx_flag;
end
end
//进入接收过程后,启动系统时钟计数器
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
clk_cnt <= 16'd0;
else if ( rx_flag ) begin //处于接收过程
if (clk_cnt < BPS_CNT - 1)
clk_cnt <= clk_cnt + 1'b1;
else
clk_cnt <= 16'd0; //对系统时钟计数达一个波特率周期后清零
end
else
clk_cnt <= 16'd0; //接收过程结束,计数器清零
end
//进入接收过程后,启动接收数据计数器
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
rx_cnt <= 4'd0;
else if ( rx_flag ) begin //处于接收过程
if (clk_cnt == BPS_CNT - 1) //对系统时钟计数达一个波特率周期
rx_cnt <= rx_cnt + 1'b1; //此时接收数据计数器加1
else
rx_cnt <= rx_cnt;
end
else
rx_cnt <= 4'd0; //接收过程结束,计数器清零
end
//根据接收数据计数器来寄存uart接收端口数据
always @(posedge sys_clk or negedge sys_rst_n) begin
if ( !sys_rst_n)
rxdata <= 8'd0;
else if(rx_flag) //系统处于接收过程
if (clk_cnt == BPS_CNT/2) begin //判断系统时钟计数器计数到数据位中间
case ( rx_cnt )
4'd1 : rxdata[0] <= uart_rxd_d1; //寄存数据位最低位
4'd2 : rxdata[1] <= uart_rxd_d1;
4'd3 : rxdata[2] <= uart_rxd_d1;
4'd4 : rxdata[3] <= uart_rxd_d1;
4'd5 : rxdata[4] <= uart_rxd_d1;
4'd6 : rxdata[5] <= uart_rxd_d1;
4'd7 : rxdata[6] <= uart_rxd_d1;
4'd8 : rxdata[7] <= uart_rxd_d1; //寄存数据位最高位
default:;
endcase
end
else
rxdata <= rxdata;
else
rxdata <= 8'd0;
end
//数据接收完毕后给出标志信号并寄存输出接收到的数据
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
uart_data <= 8'd0;
uart_done <= 1'b0;
end
else if(rx_cnt == 4'd9) begin //接收数据计数器计数到停止位时
uart_data <= rxdata; //寄存输出接收到的数据
uart_done <= 1'b1; //并将接收完成标志位拉高
end
else begin
uart_data <= 8'd0;
uart_done <= 1'b0;
end
end
endmodule
module uart_send(
input sys_clk, //系统时钟
input sys_rst_n, //系统复位,低电平有效
input uart_en, //发送使能信号
input [ 7:0] uart_din, //待发送数据
output reg uart_txd //UART发送端口 并行数据uart_din转为串行数据uart_txd传输
output uart_tx_busy, //发送忙状态标志
output en_flag ,
output reg tx_flag, //发送过程标志信号
output reg [ 7:0] tx_data, //寄存发送数据
output reg [ 3:0] tx_cnt, //发送数据计数器
);
//parameter define
parameter CLK_FREQ = 50000000; //系统时钟频率
parameter UART_BPS = 115200; //串口波特率
localparam BPS_CNT = CLK_FREQ/UART_BPS; //为得到指定波特率,对系统时钟计数BPS_CNT次
//reg define
reg uart_en_d0;
reg uart_en_d1;
reg [15:0] clk_cnt; //系统时钟计数器
//*****************************************************
//** main code
//*****************************************************
//在串口发送过程中给出忙状态标志
assign uart_tx_busy = tx_flag;
//捕获uart_en上升沿,得到一个时钟周期的脉冲信号
assign en_flag = (~uart_en_d1) & uart_en_d0;
//对发送使能信号uart_en延迟两个时钟周期
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
uart_en_d0 <= 1'b0;
uart_en_d1 <= 1'b0;
end
else begin
uart_en_d0 <= uart_en;
uart_en_d1 <= uart_en_d0;
end
end
//当脉冲信号en_flag到达时,寄存待发送的数据,并进入发送过程
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
tx_flag <= 1'b0;
tx_data <= 8'd0;
end
else if (en_flag) begin //检测到发送使能上升沿
tx_flag <= 1'b1; //进入发送过程,标志位tx_flag拉高
tx_data <= uart_din; //寄存待发送的数据
end
//计数到停止位结束时,停止发送过程
else if ((tx_cnt == 4'd9) && (clk_cnt == BPS_CNT - (BPS_CNT/16))) begin //15/16的 BPS_CNT大于1/2的BPS_CNT,也可以用一个波特率周期
tx_flag <= 1'b0; //发送过程结束,标志位tx_flag拉低
tx_data <= 8'd0;
end
else begin
tx_flag <= tx_flag;
tx_data <= tx_data;
end
end
//进入发送过程后,启动系统时钟计数器
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
clk_cnt <= 16'd0;
else if (tx_flag) begin //处于发送过程
if (clk_cnt < BPS_CNT - 1)
clk_cnt <= clk_cnt + 1'b1;
else
clk_cnt <= 16'd0; //对系统时钟计数达一个波特率周期后清零
end
else
clk_cnt <= 16'd0; //发送过程结束
end
//进入发送过程后,启动发送数据计数器
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
tx_cnt <= 4'd0;
else if (tx_flag) begin //处于发送过程
if (clk_cnt == BPS_CNT - 1) //对系统时钟计数达一个波特率周期
tx_cnt <= tx_cnt + 1'b1; //此时发送数据计数器加1
else
tx_cnt <= tx_cnt;
end
else
tx_cnt <= 4'd0; //发送过程结束
end
//根据发送数据计数器来给uart发送端口赋值
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
uart_txd <= 1'b1;
else if (tx_flag)
case(tx_cnt)
4'd0: uart_txd <= 1'b0; //起始位
4'd1: uart_txd <= tx_data[0]; //数据位最低位
4'd2: uart_txd <= tx_data[1];
4'd3: uart_txd <= tx_data[2];
4'd4: uart_txd <= tx_data[3];
4'd5: uart_txd <= tx_data[4];
4'd6: uart_txd <= tx_data[5];
4'd7: uart_txd <= tx_data[6];
4'd8: uart_txd <= tx_data[7]; //数据位最高位
4'd9: uart_txd <= 1'b1; //停止位
default: ;
endcase
else
uart_txd <= 1'b1; //空闲时发送端口为高电平
end
endmodule
module uart_loop(
input sys_clk, //系统时钟
input sys_rst_n, //系统复位,低电平有效
input recv_done, //接收一帧数据完成标志
input [7:0] recv_data, //接收的数据
input tx_busy, //发送忙状态标志
output reg send_en, //发送使能信号
output reg [7:0] send_data //待发送数据
);
//reg define
reg recv_done_d0;
reg recv_done_d1;
reg tx_ready;
//wire define
wire recv_done_flag;
//*****************************************************
//** main code
//*****************************************************
//捕获recv_done上升沿,得到一个时钟周期的脉冲信号
assign recv_done_flag = (~recv_done_d1) & recv_done_d0;
//对发送使能信号recv_done延迟两个时钟周期
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
recv_done_d0 <= 1'b0;
recv_done_d1 <= 1'b0;
end
else begin
recv_done_d0 <= recv_done;
recv_done_d1 <= recv_done_d0;
end
end
//判断接收完成信号,并在串口发送模块空闲时给出发送使能信号
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
tx_ready <= 1'b0;
send_en <= 1'b0;
send_data <= 8'd0;
end
else begin
if(recv_done_flag)begin //检测串口接收到数据
tx_ready <= 1'b1; //准备启动发送过程
send_en <= 1'b0;
send_data <= recv_data; //寄存串口接收的数据
end
else if(tx_ready && (~tx_busy)) begin //检测串口发送模块空闲
tx_ready <= 1'b0; //准备过程结束
send_en <= 1'b1; //拉高发送使能信号
end
end
end
endmodule
module uart_loopback_top(
input sys_clk, //外部50M时钟
input sys_rst_n, //外部复位信号,低有效
input uart_rxd, //UART接收端口
output uart_txd //UART发送端口
);
//parameter define
parameter CLK_FREQ = 50000000; //定义系统时钟频率
parameter UART_BPS = 115200; //定义串口波特率
//wire define
wire uart_recv_done; //UART接收完成
wire [7:0] uart_recv_data; //UART接收数据
wire uart_send_en; //UART发送使能
wire [7:0] uart_send_data; //UART发送数据
wire uart_tx_busy; //UART发送忙状态标志
//*****************************************************
//** main code
//*****************************************************
//串口接收模块
uart_recv #(
.CLK_FREQ (CLK_FREQ), //设置系统时钟频率
.UART_BPS (UART_BPS)) //设置串口接收波特率
u_uart_recv(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.uart_rxd (uart_rxd),
.uart_done (uart_recv_done),
.uart_data (uart_recv_data)
);
//串口发送模块
uart_send #(
.CLK_FREQ (CLK_FREQ), //设置系统时钟频率
.UART_BPS (UART_BPS)) //设置串口发送波特率
u_uart_send(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.uart_en (uart_send_en),
.uart_din (uart_send_data),
.uart_tx_busy (uart_tx_busy),
.uart_txd (uart_txd)
);
//串口环回模块
uart_loop u_uart_loop(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.recv_done (uart_recv_done), //接收一帧数据完成标志信号
.recv_data (uart_recv_data), //接收的数据
.tx_busy (uart_tx_busy), //发送忙状态标志
.send_en (uart_send_en), //发送使能信号
.send_data (uart_send_data) //待发送数据
);
endmodule
RS-485 是针对 UART 串口的一种接口标准,它定义了串行通信系统中发送器和接收器的一系列电气特性。相比于 RS-232,RS-485 标准的通信系统抗干扰能力较强,可实现长距离数据传输,同时支持多个收发器连接到同一个通信网络中。因此,RS-485 在工业控制领域以及有类似需求的系统中得到了广泛的应用。
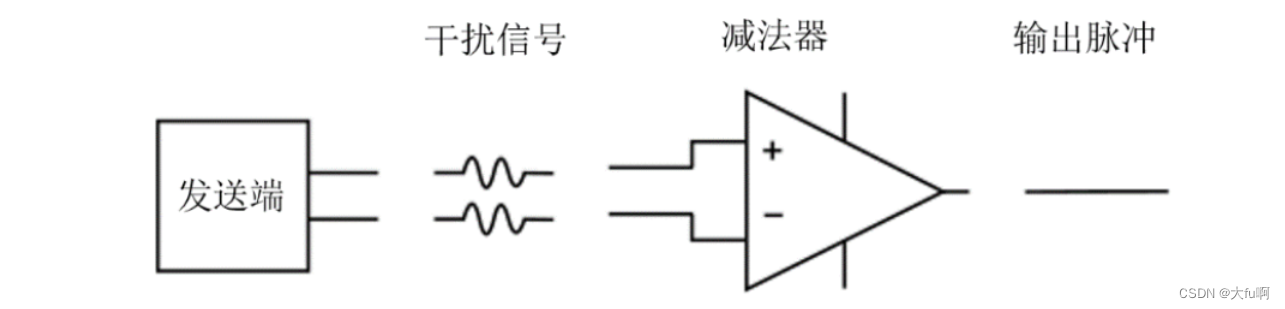
单端传输是指在发送或接收过程中,用信号线对地线的电压值来表示逻辑“0”和“1”。而差分传输使用两根信号线来传输一路信号,这两根信号线上传输的信号幅值相等,相位相差 180 度(极性相反),用它们的差值来表示逻辑“0”和“1”,如图 所示。

在传输过程中,当信号线上叠加了频率、幅值和相位都相同的干扰信号时(共模干扰),对于单端传输而言,由于地线电位为 0,则传输的信号就包含了干扰信号;而在差分传输方式下,干扰可以通过两个信号线上电压的差值抵消,相当于抑制了共模干扰,如图 所示。因此相对于单端传输方式,差分传输大大提高了信号在传输过程中的抗干扰能力,但是需要多余的信号线来实现信号传输。
RS-232 接口标准出现较早,信号采用负逻辑电平、单端传输方式工作。通过一根信号线发送,一根信 号线接收,加上一根地线,RS-232 可实现全双工通信。由于单端传输方式抗干扰能力差,导致 RS-232 标准通信距离短(小于 15 米),数据传输速率低等问题。另外 RS-232 仅支持一对一通信,存在无法实现多个设备互联的缺点。RS-422 由 RS-232 发展而来,它是为弥补 RS-232 之不足而提出的。RS-422 采用差分传输(又称平衡传输)方式,将最大传输速率提高到 10Mbps;当传输速率在 100kbps 以下时,传输距离可达 1200 米。由于采用差分传输方式,RS-422 需要 4 根信号线来实现全双工通信,两根用于发送、两根用于接收,一般会再加上一根地线。RS-422 允许在一条传输总线上连接最多 10 个接收器,从而实现单个设备发送,多个设备接收的功能。
为扩展应用范围,在 RS-422 基础上又制定了 RS-485 标准。RS-485 同样采用差分传输方式,但是 RS-485只有 2 根信号线,由发送和接收共用,因此发送和接收不能同时进行,只能实现半双工通信。RS-485 增加了多点、双向通信能力,即允许多个发送器连接到同一条总线上,各设备通过使能信号控制发送和接收过程。
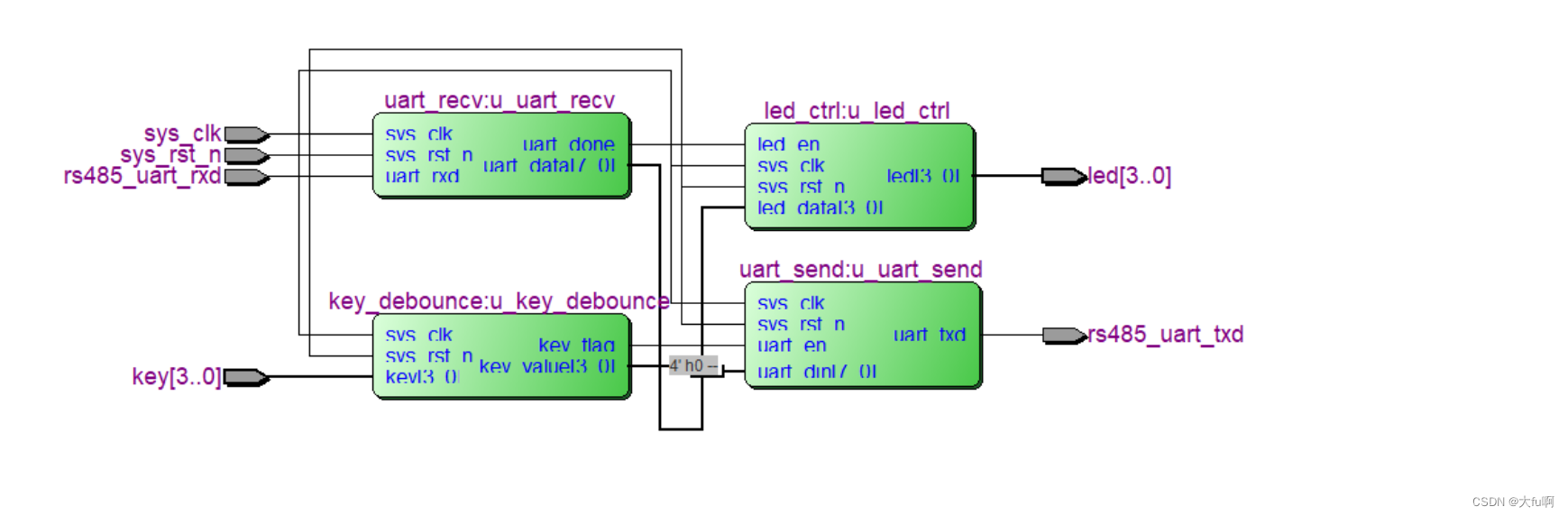
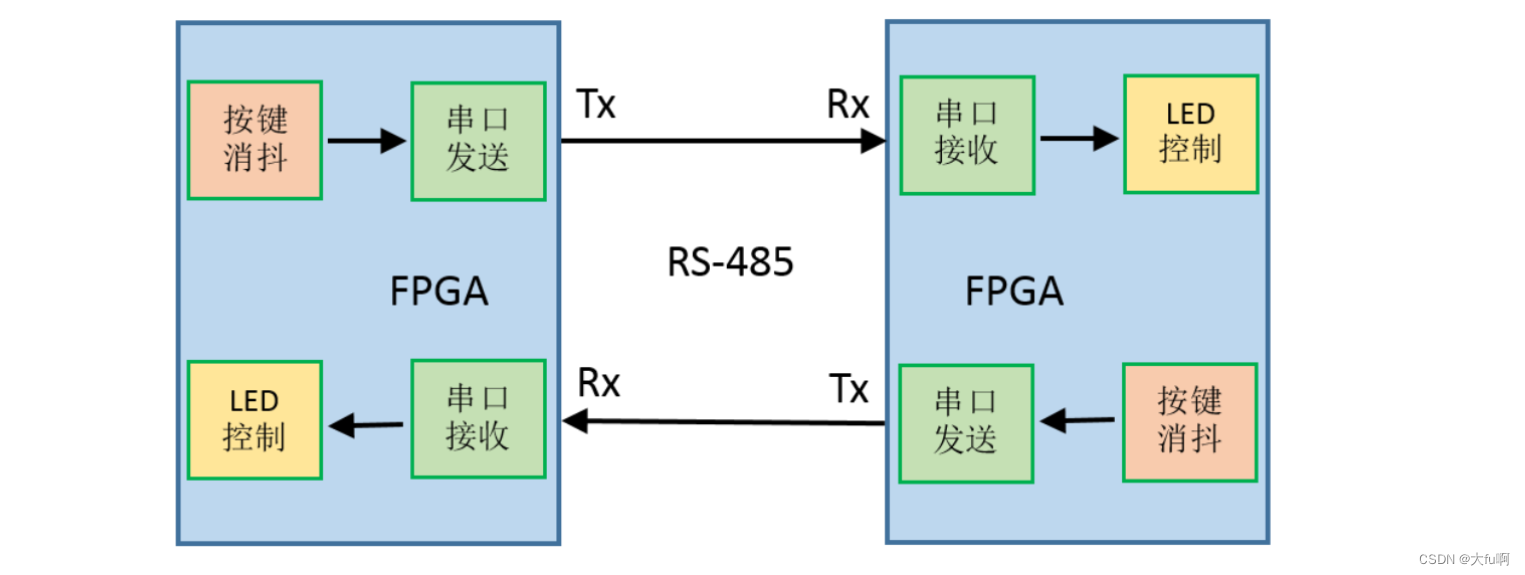
当检测到有按键按下或释放时,将按键数据通 过 RS485 串口发送出去;而当 RS485 串口接收到对方发送的按键数据时,根据接收到的数据改变 LED 灯的显示状态。由此画出系统的功能框图如下所示:
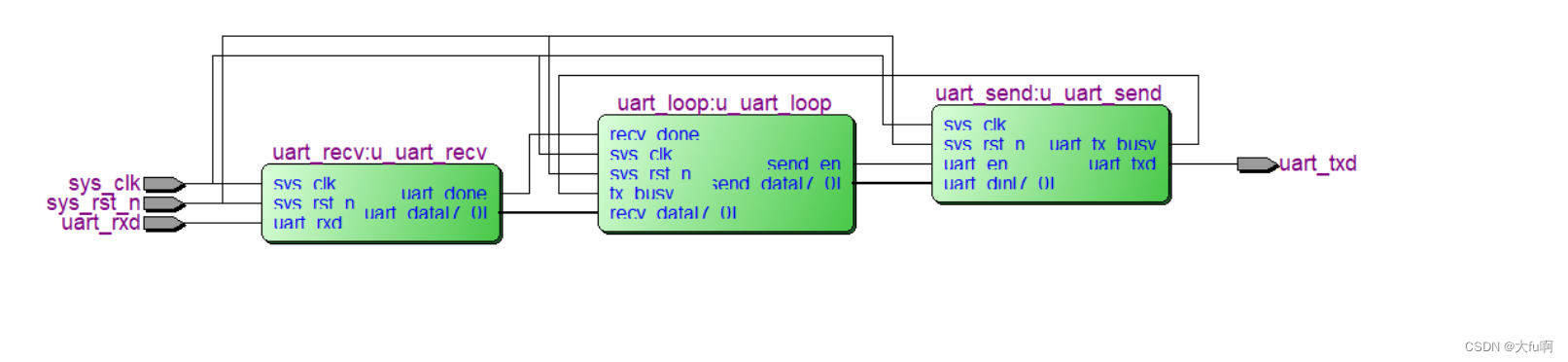
由系统总体框图可知,FPGA 部分包括五个模块,顶层模块(rs485_uart_top)、接收模块(uart_recv)、发送模块(uart_send)、按键消抖模块(key_debounce)和 LED 灯控制模块(led_ctrl)。其中在顶层模块中完成对另外四个模块的例化。
module key_debounce(
input sys_clk, //外部50M时钟
input sys_rst_n, //外部复位信号,低有效
input [3:0] key, //外部按键输入
output reg key_flag, //按键数据有效信号
output reg [3:0] key_value //按键消抖后的数据
);
//reg define
reg [31:0] delay_cnt;
reg [ 3:0] key_reg;
//*****************************************************
//** main code
//*****************************************************
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
key_reg <= 4'b1111;
delay_cnt <= 32'd0;
end
else begin
key_reg <= key;
if(key_reg != key) //一旦检测到按键状态发生变化(有按键被按下或释放)
delay_cnt <= 32'd1000000; //给延时计数器重新装载初始值(计数时间为20ms)
else if(key_reg == key) begin //在按键状态稳定时,计数器递减,开始20ms倒计时
if(delay_cnt > 32'd0)
delay_cnt <= delay_cnt - 1'b1;
else
delay_cnt <= delay_cnt;
end
end
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
key_flag <= 1'b0;
key_value <= 4'b1111;
end
else begin
if(delay_cnt == 32'd1) begin //当计数器递减到1时,说明按键稳定状态维持了20ms
key_flag <= 1'b1; //此时消抖过程结束,给出一个时钟周期的标志信号
key_value <= key; //并寄存此时按键的值
end
else begin
key_flag <= 1'b0;
key_value <= key_value;
end
end
end
endmodule
module led_ctrl(
input sys_clk, //外部50M时钟
input sys_rst_n, //外部复位信号,低有效
input led_en, //led控制使能
input [3:0] led_data, //led控制数据
output reg [3:0] led //led灯
);
//reg define
reg led_en_d0;
reg led_en_d1;
//wire define
wire led_en_flag;
//*****************************************************
//** main code
//*****************************************************
//捕获led_en上升沿,得到一个时钟周期的脉冲信号
assign led_en_flag = (~led_en_d1) & led_en_d0;
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
led_en_d0 <= 1'b0;
led_en_d1 <= 1'b0;
end
else begin
led_en_d0 <= led_en;
led_en_d1 <= led_en_d0;
end
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
led <= 4'b0000;
else if(led_en_flag) //在led_en上升沿到来时,改变led灯的状态
led <= ~led_data; //按键按下时为低电平,而led高电平时点亮
else
led <= led;
end
endmodule
module uart_recv(
input sys_clk, //系统时钟
input sys_rst_n, //系统复位,低电平有效
input uart_rxd, //UART接收端口
output reg uart_done, //接收一帧数据完成标志信号
output reg [7:0] uart_data //接收的数据
);
//parameter define
parameter CLK_FREQ = 50000000; //系统时钟频率
parameter UART_BPS = 9600; //串口波特率
localparam BPS_CNT = CLK_FREQ/UART_BPS; //为得到指定波特率,
//需要对系统时钟计数BPS_CNT次
//reg define
reg uart_rxd_d0;
reg uart_rxd_d1;
reg [15:0] clk_cnt; //系统时钟计数器
reg [ 3:0] rx_cnt; //接收数据计数器
reg rx_flag; //接收过程标志信号
reg [ 7:0] rxdata; //接收数据寄存器
//wire define
wire start_flag;
//*****************************************************
//** main code
//*****************************************************
//捕获接收端口下降沿(起始位),得到一个时钟周期的脉冲信号
assign start_flag = uart_rxd_d1 & (~uart_rxd_d0);
//对UART接收端口的数据延迟两个时钟周期
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
uart_rxd_d0 <= 1'b0;
uart_rxd_d1 <= 1'b0;
end
else begin
uart_rxd_d0 <= uart_rxd;
uart_rxd_d1 <= uart_rxd_d0;
end
end
//当脉冲信号start_flag到达时,进入接收过程
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
rx_flag <= 1'b0;
else begin
if(start_flag) //检测到起始位
rx_flag <= 1'b1; //进入接收过程,标志位rx_flag拉高
else if((rx_cnt == 4'd9)&&(clk_cnt == BPS_CNT/2))
rx_flag <= 1'b0; //计数到停止位中间时,停止接收过程
else
rx_flag <= rx_flag;
end
end
//进入接收过程后,启动系统时钟计数器与接收数据计数器
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
clk_cnt <= 16'd0;
rx_cnt <= 4'd0;
end
else if ( rx_flag ) begin //处于接收过程
if (clk_cnt < BPS_CNT - 1) begin
clk_cnt <= clk_cnt + 1'b1;
rx_cnt <= rx_cnt;
end
else begin
clk_cnt <= 16'd0; //对系统时钟计数达一个波特率周期后清零
rx_cnt <= rx_cnt + 1'b1; //此时接收数据计数器加1
end
end
else begin //接收过程结束,计数器清零
clk_cnt <= 16'd0;
rx_cnt <= 4'd0;
end
end
//根据接收数据计数器来寄存uart接收端口数据
always @(posedge sys_clk or negedge sys_rst_n) begin
if ( !sys_rst_n)
rxdata <= 8'd0;
else if(rx_flag) //系统处于接收过程
if (clk_cnt == BPS_CNT/2) begin //判断系统时钟计数器计数到数据位中间
case ( rx_cnt )
4'd1 : rxdata[0] <= uart_rxd_d1; //寄存数据位最低位
4'd2 : rxdata[1] <= uart_rxd_d1;
4'd3 : rxdata[2] <= uart_rxd_d1;
4'd4 : rxdata[3] <= uart_rxd_d1;
4'd5 : rxdata[4] <= uart_rxd_d1;
4'd6 : rxdata[5] <= uart_rxd_d1;
4'd7 : rxdata[6] <= uart_rxd_d1;
4'd8 : rxdata[7] <= uart_rxd_d1; //寄存数据位最高位
default:;
endcase
end
else
rxdata <= rxdata;
else
rxdata <= 8'd0;
end
//数据接收完毕后给出标志信号并寄存输出接收到的数据
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
uart_data <= 8'd0;
uart_done <= 1'b0;
end
else if(rx_cnt == 4'd9) begin //接收数据计数器计数到停止位时
uart_data <= rxdata; //寄存输出接收到的数据
uart_done <= 1'b1; //并将接收完成标志位拉高
end
else begin
uart_data <= 8'd0;
uart_done <= 1'b0;
end
end
endmodule
module uart_send(
input sys_clk, //系统时钟
input sys_rst_n, //系统复位,低电平有效
output uart_tx_busy, //发送忙状态标志
input uart_en, //发送使能信号
input [7:0] uart_din, //待发送数据
output reg uart_txd //UART发送端口
);
//parameter define
parameter CLK_FREQ = 50000000; //系统时钟频率
parameter UART_BPS = 9600; //串口波特率
localparam BPS_CNT = CLK_FREQ/UART_BPS; //为得到指定波特率,对系统时钟计数BPS_CNT次
//reg define
reg uart_en_d0;
reg uart_en_d1;
reg [15:0] clk_cnt; //系统时钟计数器
reg [ 3:0] tx_cnt; //发送数据计数器
reg [ 7:0] tx_data; //寄存发送数据
reg tx_flag; //发送标志,高有效
//wire define
wire en_flag;
//*****************************************************
//** main code
//*****************************************************
//在串口发送过程中给出忙状态标志
assign uart_tx_busy = tx_flag;
//捕获uart_en上升沿,得到一个时钟周期的脉冲信号
assign en_flag = (~uart_en_d1) & uart_en_d0;
//对发送使能信号uart_en延迟两个时钟周期
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
uart_en_d0 <= 1'b0;
uart_en_d1 <= 1'b0;
end
else begin
uart_en_d0 <= uart_en;
uart_en_d1 <= uart_en_d0;
end
end
//当脉冲信号en_flag到达时,寄存待发送的数据,并进入发送过程
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
tx_flag <= 1'b0;
tx_data <= 8'd0;
end
else if (en_flag) begin //检测到发送使能上升沿
tx_flag <= 1'b1; //进入发送过程,标志位tx_flag拉高
tx_data <= uart_din; //寄存待发送的数据
end
else
if ((tx_cnt == 4'd9)&&(clk_cnt == BPS_CNT - (BPS_CNT/16)))
begin //计数到停止位中间时,停止发送过程
tx_flag <= 1'b0; //发送过程结束,标志位tx_flag拉低
tx_data <= 8'd0;
end
else begin
tx_flag <= tx_flag;
tx_data <= tx_data;
end
end
//进入发送过程后,启动系统时钟计数器与发送数据计数器
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n) begin
clk_cnt <= 16'd0;
tx_cnt <= 4'd0;
end
else if (tx_flag) begin //处于发送过程
if (clk_cnt < BPS_CNT - 1) begin
clk_cnt <= clk_cnt + 1'b1;
tx_cnt <= tx_cnt;
end
else begin
clk_cnt <= 16'd0; //对系统时钟计数达一个波特率周期后清零
tx_cnt <= tx_cnt + 1'b1; //此时发送数据计数器加1
end
end
else begin //发送过程结束
clk_cnt <= 16'd0;
tx_cnt <= 4'd0;
end
end
//根据发送数据计数器来给uart发送端口赋值
always @(posedge sys_clk or negedge sys_rst_n) begin
if (!sys_rst_n)
uart_txd <= 1'b1;
else if (tx_flag)
case(tx_cnt)
4'd0: uart_txd <= 1'b0; //起始位
4'd1: uart_txd <= tx_data[0]; //数据位最低位
4'd2: uart_txd <= tx_data[1];
4'd3: uart_txd <= tx_data[2];
4'd4: uart_txd <= tx_data[3];
4'd5: uart_txd <= tx_data[4];
4'd6: uart_txd <= tx_data[5];
4'd7: uart_txd <= tx_data[6];
4'd8: uart_txd <= tx_data[7]; //数据位最高位
4'd9: uart_txd <= 1'b1; //停止位
default: ;
endcase
else
uart_txd <= 1'b1; //空闲时发送端口为高电平
end
endmodule
module rs485_uart_top(
input sys_clk, //外部50M时钟
input sys_rst_n, //外部复位信号,低有效
input [3:0] key, //按键
output [3:0] led, //led灯
//uart接口
input rs485_uart_rxd, //rs485串口接收端口
output rs485_uart_txd //rs485串口发送端口
);
//parameter define
parameter CLK_FREQ = 50000000; //定义系统时钟频率
parameter UART_BPS = 115200; //定义串口波特率
//wire define
wire tx_en_w; //UART发送使能
wire rx_done_w; //UART接收完毕信号
wire [7:0] tx_data_w; //UART发送数据
wire [7:0] rx_data_w; //UART接收数据
wire [3:0] key_value_w; //消抖后的按键数据
//*****************************************************
//** main code
//*****************************************************
assign tx_data_w = {4'd0,key_value_w}; //将按键消抖后的值送到发送模块
uart_recv #( //串口接收模块
.CLK_FREQ (CLK_FREQ), //设置系统时钟频率
.UART_BPS (UART_BPS)) //设置串口接收波特率
u_uart_recv(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.uart_rxd (rs485_uart_rxd),
.uart_done (rx_done_w),
.uart_data (rx_data_w)
);
uart_send #( //串口发送模块
.CLK_FREQ (CLK_FREQ), //设置系统时钟频率
.UART_BPS (UART_BPS)) //设置串口发送波特率
u_uart_send(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.uart_en (tx_en_w),
.uart_din (tx_data_w),
.uart_txd (rs485_uart_txd)
);
key_debounce u_key_debounce(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.key (key),
.key_flag (tx_en_w), //按键有效通知信号
.key_value (key_value_w) //按键消抖后的数据
);
led_ctrl u_led_ctrl(
.sys_clk (sys_clk),
.sys_rst_n (sys_rst_n),
.led_en (rx_done_w), //led控制使能
.led_data (rx_data_w[3:0]), //led控制数据
.led (led)
);
endmodule
我构建了两个需要相互通信和发送文件的Rails应用程序。例如,一个Rails应用程序会发送请求以查看其他应用程序数据库中的表。然后另一个应用程序将呈现该表的json并将其发回。我还希望一个应用程序将存储在其公共(public)目录中的文本文件发送到另一个应用程序的公共(public)目录。我从来没有做过这样的事情,所以我什至不知道从哪里开始。任何帮助,将不胜感激。谢谢! 最佳答案 无论Rails是什么,几乎所有Web应用程序都有您的要求,大多数现代Web应用程序都需要相互通信。但是有一个小小的理解需要你坚持下去,网站不应直接访问彼此
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
MIMO技术的优缺点优点通过下面三个增益来总体概括:阵列增益。阵列增益是指由于接收机通过对接收信号的相干合并而活得的平均SNR的提高。在发射机不知道信道信息的情况下,MIMO系统可以获得的阵列增益与接收天线数成正比复用增益。在采用空间复用方案的MIMO系统中,可以获得复用增益,即信道容量成倍增加。信道容量的增加与min(Nt,Nr)成正比分集增益。在采用空间分集方案的MIMO系统中,可以获得分集增益,即可靠性性能的改善。分集增益用独立衰落支路数来描述,即分集指数。在使用了空时编码的MIMO系统中,由于接收天线或发射天线之间的间距较远,可认为它们各自的大尺度衰落是相互独立的,因此分布式MIMO
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
我完全不是程序员,正在学习使用Ruby和Rails框架进行编程。我目前正在使用Ruby1.8.7和Rails3.0.3,但我想知道我是否应该升级到Ruby1.9,因为我真的没有任何升级的“遗留”成本。缺点是什么?我是否会遇到与普通gem的兼容性问题,或者甚至其他我不太了解甚至无法预料的问题? 最佳答案 你应该升级。不要坚持从1.8.7开始。如果您发现不支持1.9.2的gem,请避免使用它们(因为它们很可能不被维护)。如果您对gem是否兼容1.9.2有任何疑问,您可以在以下位置查看:http://www.railsplugins.or
如何学习ruby的正则表达式?(对于假人) 最佳答案 http://www.rubular.com/在Ruby中使用正则表达式时是一个很棒的工具,因为它可以立即将结果可视化。 关于ruby-我如何学习ruby的正则表达式?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/1881231/
深度学习12.CNN经典网络VGG16一、简介1.VGG来源2.VGG分类3.不同模型的参数数量4.3x3卷积核的好处5.关于学习率调度6.批归一化二、VGG16层分析1.层划分2.参数展开过程图解3.参数传递示例4.VGG16各层参数数量三、代码分析1.VGG16模型定义2.训练3.测试一、简介1.VGG来源VGG(VisualGeometryGroup)是一个视觉几何组在2014年提出的深度卷积神经网络架构。VGG在2014年ImageNet图像分类竞赛亚军,定位竞赛冠军;VGG网络采用连续的小卷积核(3x3)和池化层构建深度神经网络,网络深度可以达到16层或19层,其中VGG16和VGG
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞