目录
光是一种由各种波长(或频率)的电磁波叠加起来的电磁辐射。光谱借助光栅、棱镜、傅里叶变换等分光手段将一束电磁辐射的某项性质解析成辐射的各个组成波长对此性质贡献的图表。

化学计量学是综合运用计算机科学、数学和统计学等相关学科,寻找最佳方法优化化学测量过程,并从测量数据中最大限度地提取有用信息。将化学计量学与分子光谱相结合,最大限度地提取光谱数据中的有用信息,建立对分析组分性质高效、可靠的分析检测模型。
拉曼光谱用于定量分析的处理流程如下:

对于一个测量系统来说,算法的流程分为两条线路,一条是提取已知的样品(校准品)的特征量,然后通过回归算法在特征量与浓度之间建立一个数学模型,一条是提取被测样品的特征量,然后再代入数学模型中计算得到被测样品的浓度值。
从上述的流程中可以将光谱算法分为三大块:数据预处理、特征量提取、建立数学模型。常见的算法整理如下:

原因:不同条件下采集到的光谱数据往往具有不同的量纲和量纲单位,这样的情况会影响到数据分析的结果
方法:采用归一化的算法使数据被限定在一定的范围内比如[0,1]或者[-1,1]),从而让不同浓度的光谱数据具有可比性。常用的归一化算法有以下两种:
(1)min-max标准化(Min-Max Normalization)(线性函数归一化)
本质:把数变为【0,1】之间的小数。
转换函数:(X-Min)/(Max-Min)
其中,X为原始数据,Min所有样本数据的最小值,Max为所有样本数据的最大值。
(2)0均值标准化(Z-score standardization)
本质:把有量纲表达式变成无量纲表达式。
转换函数:(X-Mean)/SD
其中,Mean为所有样本数据的均值。SD为所有样本数据的标准差。
| 序号 | 归一化方法 | 应用场景 | 缺点 |
| 1 | Min-Max Normalization | 不涉及距离度量、协方差计算、数据不符合正太分布的时候 | (1)当有新数据加入时,会导致min(x)和max(x)的变化,需要重新定义; (2)存在极端的最大值或者最小值。 |
| 2 | z—score 标准化 | 1、在分类、聚类算法中,需要使用距离来度量相似性的时候; 2、使用PCA技术进行降维的时候; 3、数据服从正态分布 | / |
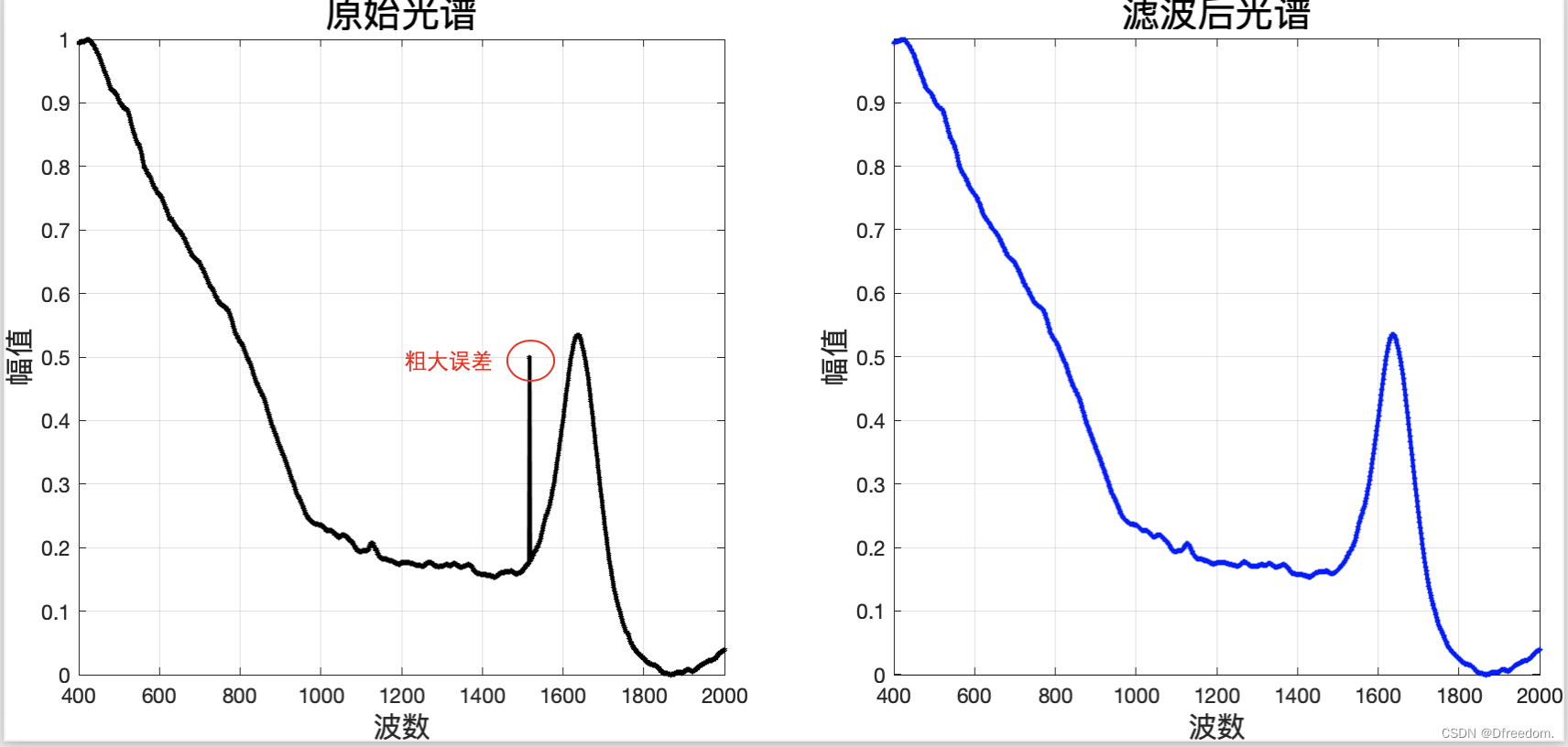
原因:光谱数据中存在随机噪声(光源噪声、CCD噪声、暗电流等),同样会影响后续的数据分析结果。
方法:采用数字滤波算法滤除随机噪声,提高信噪比。常用的滤波算法有滑动中值滤波、滑动均值滤波、滑动多项式滤波(Savitzky-Golay滤波 )等
(1)滑动中值滤波
原理:采用一个窗口沿着光谱向量平移,逐一求取窗口内元素的中值,替代原始光谱中窗口中心位置处的元素,即可得到降噪的光谱。
MATLAB代码:
yy=medfilt1(y,framelen)
Yy为输出,y为输入,framelen为窗口长度;
(2)滑动均值滤波
原理:采用一个窗口沿着光谱向量平移,逐一求取窗口内元素的均值,替代原始光谱中窗口中心位置处的元素,即可得到降噪的光谱。
MATLAB代码:
yy=smooth(y,span);
%span为奇数,表示窗宽,比如span=2,则窗口长度为5;
(3)滑动多项式滤波(S-G滤波)
原理:通过一个移动窗口,对窗口内部元素做多项式最小二乘拟合,得到窗口中 心位置处元素平滑后的值。
MATLAB代码:
yy = sgolayfilt(y,order,framelen)
% order为多项式阶数,framelen为窗口长度。
滤波效果:
原因:荧光背景、样品及周围环境的黑体辐射等影响,导致光谱的基线产生,其表现为缓慢变化曲线,直接对后续的数据分析产生影响。因此需要在后续处理之前将谱线中的基线消除。
常用的基线校正算法有分段线性拟合法、局部极值中值法、多项式拟合法。本文主要介绍多项式拟合法。多项式拟合的实现流程如下:
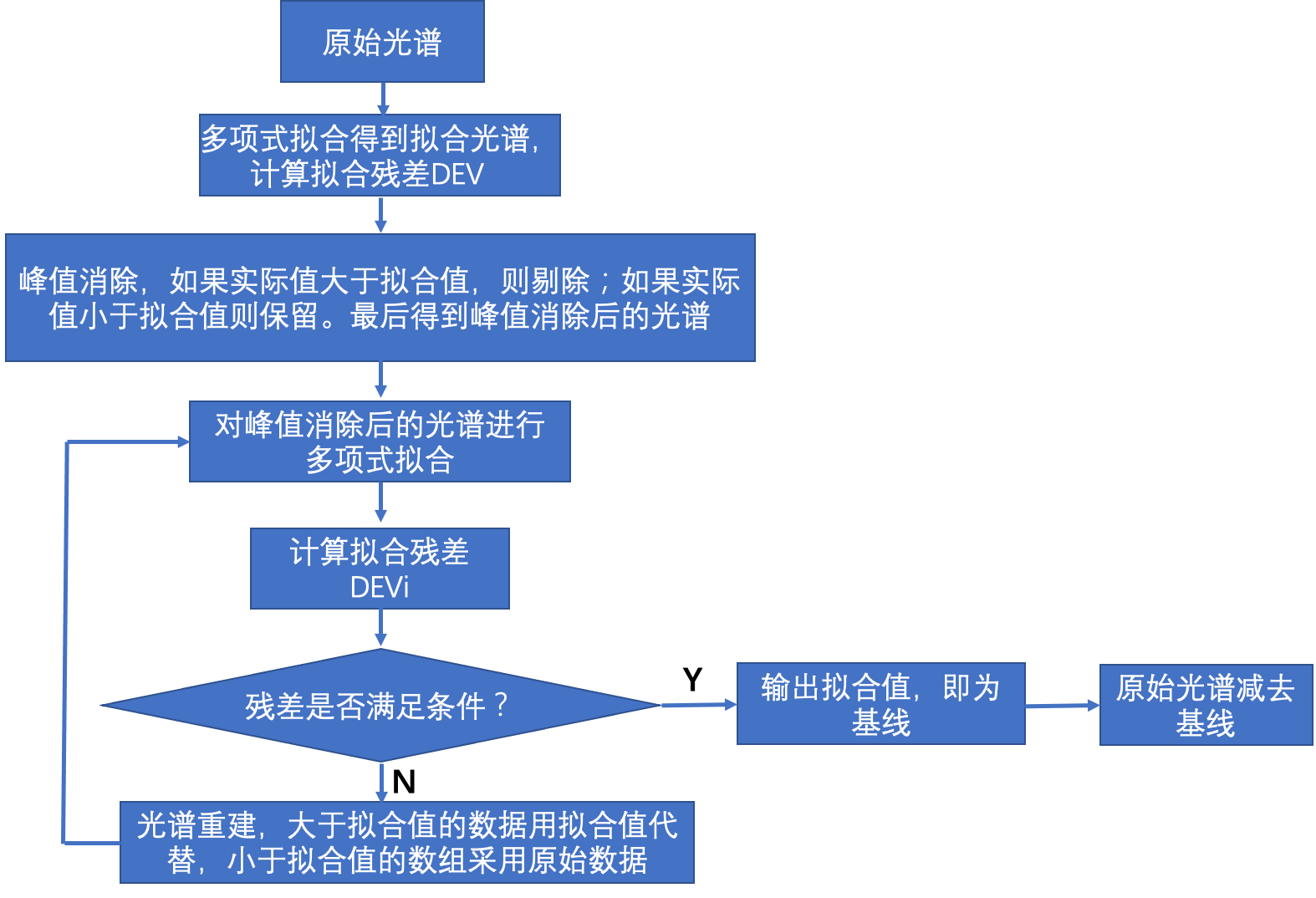
分三步:
① 峰值消除;
② 多项式拟合逼近基线,得到基线;
③ 减去基线,得到基线校正后的光谱数据。
其中,拟合残差计算公式如下:
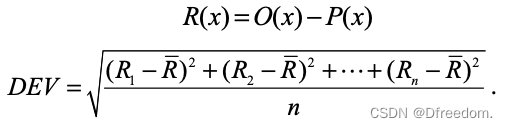
式中O(x)为原始光谱,P(x)为拟合光谱,DEV为残差。
残差判断条件如下:
If i=1,判断条件为abs(DEV1-DEV)/DEV1<0.05;
else,判断条件为abs(DEVi-DEVi-1)/DEVi<0.05;
MATLAB代码:
x=[];%拉曼位移
y=[];%原始光谱
n=5;%多项式阶数
[p0,s0,mu0]=polyfit(x,y,n);%多项式拟合
y_fit0=polyval(p0,x,[],mu0);%计算拟合值
r0=y-y_fit0;
dev0=sqrt(sum((r0-mean(r0)).^2)/length(r0));%计算残差
y_remove0=y(find(y<=y_fit0));%峰值消除
x_remove0=x(find(y<=y_fit0));%峰值消除
i=1;
judge=1;
while(judge)
p1,s1,mu1]=polyfit(x_remove0,y_remove0,n);%多项式拟合
y_fit1=polyval(p1,x_remove0,[],mu1);%计算拟合值
r1=y_remove0-y_fit1;
dev(i)=sqrt(sum((r1-mean(r1)).^2)/length(r1));%计算残差
if i==1
judge=abs(dev(i)-dev0)/dev(i)>0.05;
else
judge=abs((dev(i)-dev(i-1))/dev(i))>0.05;%残差判断条件
end
index=find(y_remove0<=y_fit1);
y_remove0(index)=y_fit1(index);%光谱重建,大于拟合值的数据用拟合值代替,小于拟合值的数组采用原始数据
i=i+1
end
y_baseline=polyval(p1,x,[],mu1);%基线
y_baseline_correction=y-y_baseline;%基线校正后
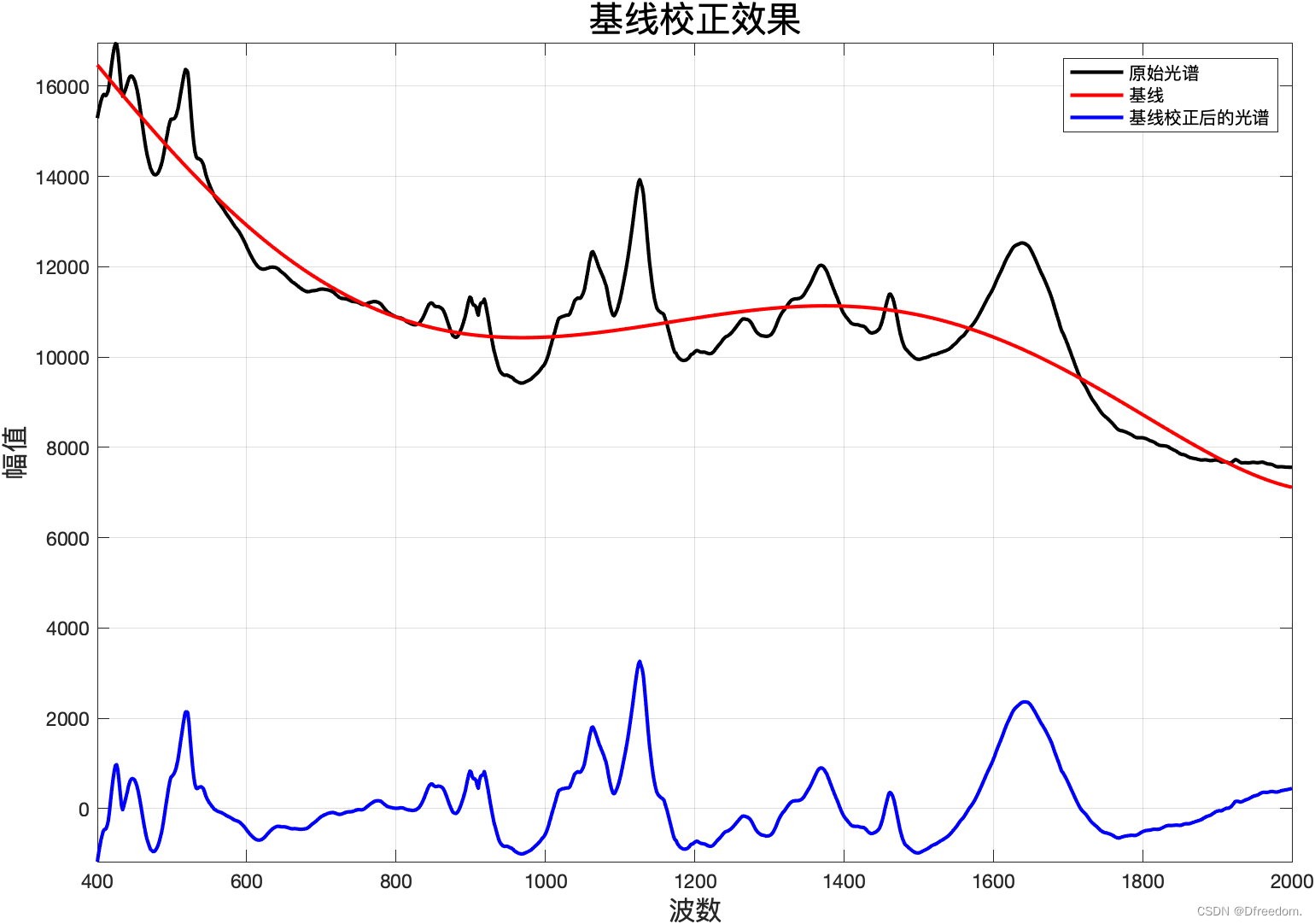
figure(1)
h=plot(x,y,'k',x,y_baseline,'r',x,y_baseline_correction,'b')
set(h,'Linewidth',2,'Markersize',2)%设置线宽和点的大小
title('基线校正效果','fontsize',20)%图形标题
xlabel('波数','fontsize',15)%x轴名称
ylabel('幅值','fontsize',15)%y轴名称
grid on %打开网格线
egend('原始光谱','基线','基线校正后的光谱')%添加图例
axis tight基线校正效果:
为了提取和浓度有一定函数关系的特征量,最常用的是谱线的峰值或者谱线与坐标轴所夹的面积差。

求解得到特征量与浓度值的函数关系式,一般采用回归的方式。
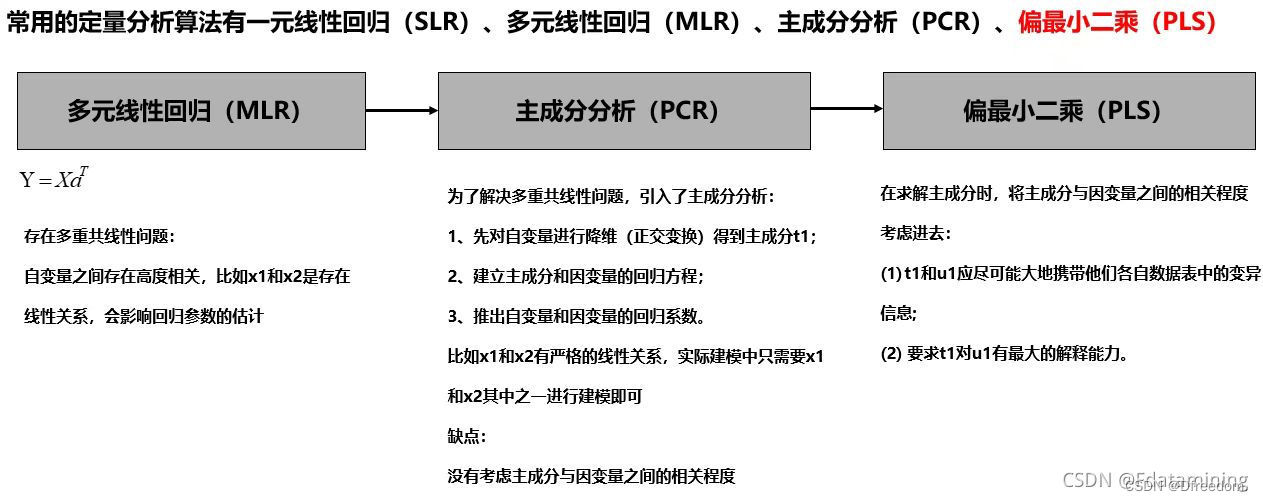
MATLAB代码:
PCR:主成分分析(PCA)原理分析&Python实现_Dfreedom.的博客-CSDN博客_pca python
PLS:偏最小二乘(PLS)原理分析&Python实现_Dfreedom.的博客-CSDN博客_偏最小二乘回归分析python
我主要使用Ruby来执行此操作,但到目前为止我的攻击计划如下:使用gemsrdf、rdf-rdfa和rdf-microdata或mida来解析给定任何URI的数据。我认为最好映射到像schema.org这样的统一模式,例如使用这个yaml文件,它试图描述数据词汇表和opengraph到schema.org之间的转换:#SchemaXtoschema.orgconversion#data-vocabularyDV:name:namestreet-address:streetAddressregion:addressRegionlocality:addressLocalityphoto:i
Rackup通过Rack的默认处理程序成功运行任何Rack应用程序。例如:classRackAppdefcall(environment)['200',{'Content-Type'=>'text/html'},["Helloworld"]]endendrunRackApp.new但是当最后一行更改为使用Rack的内置CGI处理程序时,rackup给出“NoMethodErrorat/undefinedmethod`call'fornil:NilClass”:Rack::Handler::CGI.runRackApp.newRack的其他内置处理程序也提出了同样的反对意见。例如Rack
有时我需要处理键/值数据。我不喜欢使用数组,因为它们在大小上没有限制(很容易不小心添加超过2个项目,而且您最终需要稍后验证大小)。此外,0和1的索引变成了魔数(MagicNumber),并且在传达含义方面做得很差(“当我说0时,我的意思是head...”)。散列也不合适,因为可能会不小心添加额外的条目。我写了下面的类来解决这个问题:classPairattr_accessor:head,:taildefinitialize(h,t)@head,@tail=h,tendend它工作得很好并且解决了问题,但我很想知道:Ruby标准库是否已经带有这样一个类? 最佳
我正在尝试使用Curbgem执行以下POST以解析云curl-XPOST\-H"X-Parse-Application-Id:PARSE_APP_ID"\-H"X-Parse-REST-API-Key:PARSE_API_KEY"\-H"Content-Type:image/jpeg"\--data-binary'@myPicture.jpg'\https://api.parse.com/1/files/pic.jpg用这个:curl=Curl::Easy.new("https://api.parse.com/1/files/lion.jpg")curl.multipart_form_
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
文章目录一、概述简介原理模块二、配置Mysql使用版本环境要求1.操作系统2.mysql要求三、配置canal-server离线下载在线下载上传解压修改配置单机配置集群配置分库分表配置1.修改全局配置2.实例配置垂直分库水平分库3.修改group-instance.xml4.启动监听四、配置canal-adapter1修改启动配置2配置映射文件3启动ES数据同步查询所有订阅同步数据同步开关启动4.验证五、配置canal-admin一、概述简介canal是Alibaba旗下的一款开源项目,Java开发。基于数据库增量日志解析,提供增量数据订阅&消费。Git地址:https://github.co
我正在尝试在Rails上安装ruby,到目前为止一切都已安装,但是当我尝试使用rakedb:create创建数据库时,我收到一个奇怪的错误:dyld:lazysymbolbindingfailed:Symbolnotfound:_mysql_get_client_infoReferencedfrom:/Library/Ruby/Gems/1.8/gems/mysql2-0.3.11/lib/mysql2/mysql2.bundleExpectedin:flatnamespacedyld:Symbolnotfound:_mysql_get_client_infoReferencedf
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
SPI接收数据左移一位问题目录SPI接收数据左移一位问题一、问题描述二、问题分析三、探究原理四、经验总结最近在工作在学习调试SPI的过程中遇到一个问题——接收数据整体向左移了一位(1bit)。SPI数据收发是数据交换,因此接收数据时从第二个字节开始才是有效数据,也就是数据整体向右移一个字节(1byte)。请教前辈之后也没有得到解决,通过在网上查阅前人经验终于解决问题,所以写一个避坑经验总结。实际背景:MCU与一款芯片使用spi通信,MCU作为主机,芯片作为从机。这款芯片采用的是它规定的六线SPI,多了两根线:RDY和INT,这样从机就可以主动请求主机给主机发送数据了。一、问题描述根据从机芯片手