很好用,很方便。
简单发布和订阅代码直接能跑的。如下:
学习效率指数提升,果然数字生产力之神!
空洞的问题和回复:
如何在一个月时间内掌握ROS2机器人操作系统的全部核心内容?
要在一个月时间内掌握ROS2机器人操作系统的全部核心内容,建议您采用以下步骤:
首先,阅读ROS2官方文档,了解系统的基本概念和架构。
安装ROS2,并在自己的电脑上进行实践。
通过官方提供的教程和示例代码,学习如何使用各种功能。
参加在线课程或线下培训,进一步加深对ROS2的理解。
尝试自己设计和编写ROS2程序,练习应用。
通过参加社区活动,与其他开发者交流经验,解决遇到的问题。
注意:要想在一个月内掌握ROS2,需要您有一定的编程能力和自学能力。
如何让一个没有任何基础的人在一个月时间内掌握ROS2机器人操作系统的全部核心内容?
首先,建议这个人先了解ROS2的基本概念,包括节点、消息、服务、参数等。然后,通过官方文档和教程学习ROS2的安装、配置、运行基本示例程序。接着,练习使用ROS2提供的常用工具,如rviz、rqt等。最后,通过实践在真实机器人或仿真环境中使用ROS2进行开发。建议每天至少花一个小时的时间来学习和练习,每周进行小的项目练习,最后一个月专门花时间在大的项目上.
学习了一个月还没有掌握ROS2基本内容,想放弃,是不是应该果断放弃?
学习新技能通常需要时间和耐心,一个月的时间可能不足以掌握ROS2的基本内容。如果您对ROS2感兴趣并且相信自己能够学会它,那么您应该继续努力学习。可以尝试更换学习方式,寻求其他资源或寻求帮助。然而,如果您对ROS2没有兴趣或者觉得学习它不重要,那么放弃是可以考虑的。
学习ROS2机器人是不是有一定的要求和门槛,并非所有学生都能学会呢?
学习ROS2机器人确实有一定的要求和门槛。需要具备较好的编程能力和对机器人系统有一定的了解。不过,并不是所有学生都需要满足这些要求才能学习ROS2机器人。如果你有兴趣并且愿意努力学习,可以通过不断学习和实践来克服门槛。
具体但简单的编程问题:

给一段ROS2机器人发布和订阅的示例代码?
以下是一段简单的ROS2发布和订阅的示例代码:
import rclpy
from std_msgs.msg import String
def publisher_callback(msg):
print("Received: " + msg.data)
def main(args=None):
rclpy.init(args=args)
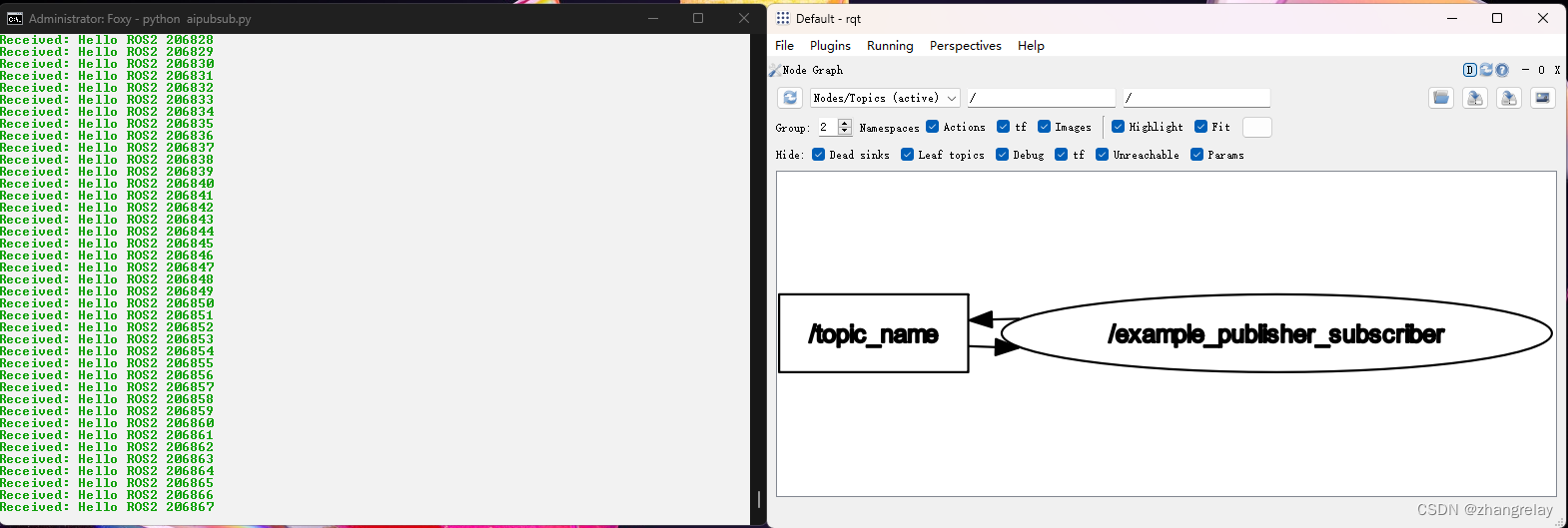
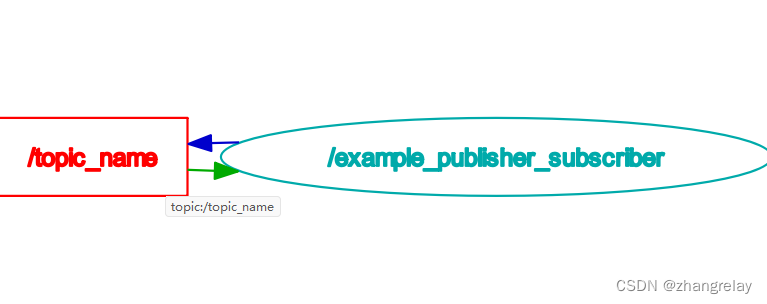
node = rclpy.create_node("example_publisher_subscriber")
publisher = node.create_publisher(String, "topic_name", 10)
subscriber = node.create_subscription(String, "topic_name", publisher_callback, 10)
msg = String()
msg.data = "Hello ROS2"
i = 0
while rclpy.ok():
msg.data = "Hello ROS2 " + str(i)
i += 1
publisher.publish(msg)
rclpy.spin_once(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()这段代码中,我们定义了一个发布者和一个订阅者,发布者向"topic_name"主题发布消息,订阅者监听"topic_name"主题并使用publisher_callback回调函数处理接收到的消息。
给一段ROS2机器人发布和订阅激光传感器数据的示例代码?
ROS 2 中发布和订阅激光传感器数据的示例代码如下:
发布者:
import rclpy
from sensor_msgs.msg import LaserScan
class LaserPublisher:
def __init__(self):
self.node = rclpy.create_node('laser_publisher')
self.pub = self.node.create_publisher(LaserScan, 'scan', 10)
timer_period = 0.5 # s
self.timer = self.node.create_timer(timer_period, self.timer_callback)
def timer_callback(self):
msg = LaserScan()
# Fill in msg with data from the laser sensor
self.pub.publish(msg)
def destroy_node(self):
self.node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
rclpy.init()
pub = LaserPublisher()
rclpy.spin(pub.node)
pub.destroy_node()订阅者:
import rclpy
from sensor_msgs.msg import LaserScan
class LaserSubscriber:
def __init__(self):
self.node = rclpy.create_node('laser_subscriber')
self.sub = self.node.create_subscription(LaserScan, 'scan', self.laser_callback, 10)
def laser_callback(self, msg):
# Do something with the received message
print(msg.ranges)
def destroy_node(self):
self.node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
rclpy.init()
sub = LaserSubscriber()
rclpy.spin(sub.node)
sub.destroy_node()注意:这只是示例代码,实际应用中需要根据实际情况进行修改。
再比如C++里程计案例,参考示例可以快速写出需要的代码,极大提升学习ROS2编程效率。
给一段ROS2机器人订阅里程计传感器数据的C++示例代码?
以下是一段示例代码,用于在ROS2中订阅里程计传感器数据:
#include "rclcpp/rclcpp.hpp"
#include "sensor_msgs/msg/odometry.hpp"
class OdomSubscriber : public rclcpp::Node
{
public:
OdomSubscriber() : Node("odom_subscriber")
{
// 创建订阅者
auto callback =
[this](const sensor_msgs::msg::Odometry::SharedPtr msg) -> void
{
// 处理里程计数据
RCLCPP_INFO(this->get_logger(), "Received odometry data: x: %f, y: %f, z: %f",
msg->pose.pose.position.x, msg->pose.pose.position.y, msg->pose.pose.position.z);
};
subscription_ = this->create_subscription<sensor_msgs::msg::Odometry>("odom", 10, callback);
}
private:
rclcpp::Subscription<sensor_msgs::msg::Odometry>::SharedPtr subscription_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<OdomSubscriber>());
rclcpp::shutdown();
return 0;
}这段代码定义了一个类 OdomSubscriber ,继承了 rclcpp::Node ,在构造函数中创建了一个订阅者,并在回调函数中打印了里程计数据。在main函数中调用rclcpp::init()初始化,然后调用rclcpp::spin()运行订阅者,最后调用rclcpp::shutdown()关闭。
给一段ROS2机器人发布里程计传感器数据的C++示例代码?
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/nav_sat_fix.hpp>
class GPSPublisher : public rclcpp::Node
{
public:
GPSPublisher() : Node("gps_publisher")
{
publisher_ = this->create_publisher<sensor_msgs::msg::NavSatFix>("gps_data", 10);
timer_ = this->create_wall_timer(std::chrono::seconds(1), std::bind(&GPSPublisher::timer_callback, this));
}
private:
void timer_callback()
{
auto msg = sensor_msgs::msg::NavSatFix();
msg.latitude = 37.7833;
msg.longitude = -122.4167;
msg.altitude = 0.0;
publisher_->publish(msg);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher<sensor_msgs::msg::NavSatFix>::SharedPtr publisher_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<GPSPublisher>());
rclcpp::shutdown();
return 0;
}这是一段用C++编写的ROS2机器人发布里程计传感器数据的示例代码。在这里,我们创建了一个名为GPSPublisher的节点,它发布一个名为"gps_data"的消息,消息类型为sensor_msgs/NavSatFix。在timer_callback函数中,我们填充了一些模拟的GPS数据并发布消息。
机器翻译如下:
ChatGPT:优化对话语言模型
我们训练了一个叫做ChatGPT的模型,它以对话方式进行交互。对话格式使ChatGPT能够回答后续问题、承认错误、质疑不正确的前提和拒绝不适当的请求。ChatGPT是InstructGPT的兄弟模型,它被训练为在提示中遵循指令并提供详细的响应。
局限性
ChatGPT有时会写出看似合理但不正确或荒谬的答案。解决这一问题具有挑战性,因为:(1)在RL培训期间,目前没有任何真相来源;(2) 训练模型更加谨慎会导致它拒绝正确回答的问题;(3)监督训练误导了模型,因为理想的答案取决于模型知道什么,而不是人类演示者知道什么。
ChatGPT对输入短语的调整或多次尝试同一提示很敏感。例如,给定一个问题的一个短语,模型可以声称不知道答案,但稍微重新措辞,可以正确回答。
该模型通常过于冗长,过度使用某些短语,例如重申它是OpenAI训练的语言模型。这些问题源于培训数据中的偏差(培训师更喜欢看起来更全面的较长答案)和众所周知的优化问题。12
理想情况下,当用户提供不明确的查询时,模型会提出明确的问题。相反,我们当前的模型通常猜测用户的意图。
虽然我们努力让模型拒绝不适当的请求,但它有时会响应有害的指令或表现出有偏见的行为。我们正在使用ModerationAPI来警告或阻止某些类型的不安全内容,但我们预计目前它会有一些误报和误报。我们渴望收集用户反馈,以帮助我们正在进行的改进系统的工作。
几个月前,我读了一篇关于rubygem的博客文章,它可以通过阅读代码本身来确定编程语言。对于我的生活,我不记得博客或gem的名称。谷歌搜索“ruby编程语言猜测”及其变体也无济于事。有人碰巧知道相关gem的名称吗? 最佳答案 是这个吗:http://github.com/chrislo/sourceclassifier/tree/master 关于ruby-寻找通过阅读代码确定编程语言的rubygem?,我们在StackOverflow上找到一个类似的问题:
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
英文版英文链接关注公众号在“亚特兰蒂斯的回声”中踏上一段难忘的冒险之旅,深入未知的海洋深处。足智多谋的考古学家AriaSeaborne偶然发现了一件古代神器,揭示了一张通往失落之城亚特兰蒂斯的隐藏地图。在她神秘的导师内森·兰登教授的指导和勇敢的冒险家亚历克斯·默瑟的帮助下,阿丽亚开始了一段危险的旅程,以揭开这座传说中城市的真相。他们的冒险之旅带领他们穿越险恶的大海、神秘的岛屿和充满陷阱和谜语的致命迷宫。随着Aria潜在的魔法能力的觉醒,她被睿智勇敢的QueenNeria的幻象所指引,她让她为即将到来的挑战做好准备。三人组揭开亚特兰蒂斯令人惊叹的隐藏文明,并了解到邪恶的巫师马拉卡勋爵试图利用其古
网络编程套接字网络编程基础知识理解源`IP`地址和目的`IP`地址理解源MAC地址和目的MAC地址认识端口号理解端口号和进程ID理解源端口号和目的端口号认识`TCP`协议认识`UDP`协议网络字节序socket编程接口`sockaddr``UDP`网络程序服务器端代码逻辑:需要用到的接口服务器端代码`udp`客户端代码逻辑`udp`客户端代码`TCP`网络程序服务器代码逻辑多个版本服务器单进程版本多进程版本多线程版本线程池版本服务器端代码客户端代码逻辑客户端代码TCP协议通讯流程TCP协议的客户端/服务器程序流程三次握手(建立连接)数据传输四次挥手(断开连接)TCP和UDP对比网络编程基础知识
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
require"socket"server="irc.rizon.net"port="6667"nick="RubyIRCBot"channel="#0x40"s=TCPSocket.open(server,port)s.print("USERTesting",0)s.print("NICK#{nick}",0)s.print("JOIN#{channel}",0)这个IRC机器人没有连接到IRC服务器,我做错了什么? 最佳答案 失败并显示此消息::irc.shakeababy.net461*USER:Notenoughparame
我完全不是程序员,正在学习使用Ruby和Rails框架进行编程。我目前正在使用Ruby1.8.7和Rails3.0.3,但我想知道我是否应该升级到Ruby1.9,因为我真的没有任何升级的“遗留”成本。缺点是什么?我是否会遇到与普通gem的兼容性问题,或者甚至其他我不太了解甚至无法预料的问题? 最佳答案 你应该升级。不要坚持从1.8.7开始。如果您发现不支持1.9.2的gem,请避免使用它们(因为它们很可能不被维护)。如果您对gem是否兼容1.9.2有任何疑问,您可以在以下位置查看:http://www.railsplugins.or
我创建了一个由于“在运行时执行的单例元类定义”而无法编码的对象(这段代码的描述是否正确?)。这是通过以下代码执行的:#defineclassXthatmyusesingletonclassmetaprogrammingfeatures#throughcallofmethod:break_marshalling!classXdefbreak_marshalling!meta_class=class我该怎么做才能使对象编码正确?是否可以从对象instance_of_x的classX中“移除”单例组件?我真的需要一个建议,因为我们的一些对象需要通过Marshal.dump序列化机制进行缓存。