在本例中,我们介绍了一个仿真工作流程,用于在具有不同照明条件的特定环境中,从光学系统和CMOS成像器的组合中分析相机系统的图像质量。此示例主要涵盖整个工作流程中的Ansys Speos部分。该光学系统采用Ansys Zemax OpticStudio设计,并导出到Ansys Speos进行系统级分析。CMOS成像器采用Ansys Lumerical设计,并导出至Ansys Speos。
联系工作人员获取附件
概述
在相机系统中,CMOS(互补金属氧化物半导体)成像器是一种电子元件,其中入射吸收的光子产生可以进行数字处理的光电流。在本例中,我们使用Ansys完整的光学解决方案,将Zemax OpticStudio的光学系统信息以及Lumerical的CMOS成像器导入Speos,在3D场景中进行完整的相机系统分析,并仿真成像仪生成的电子地图。在仿真整个光学系统时,这种互操作性工作流程考虑了宏观相机镜头与CMOS图像传感器微观结构之间的相互作用。借助 Speos 处理逼真照明和基于光度学/辐射物理场的渲染功能,用户可以轻松优化组件,并构建图像传感器记录的最终电子地图的准确视图,以设计基于应用的相机。
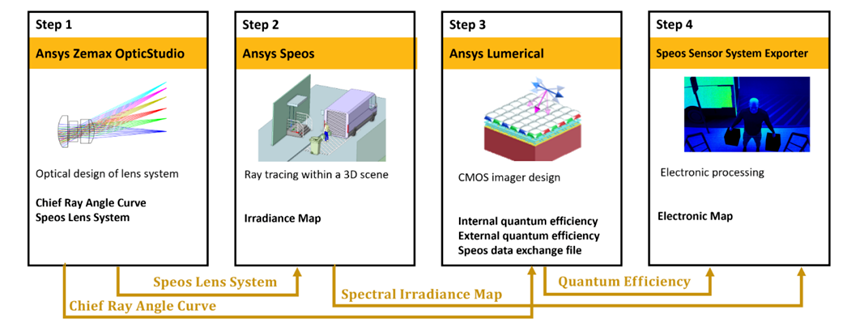
此虚拟解决方案需要四个主要工具
1. Zemax OpticStudio 和Speos Lens System Importer ,用于导出 Zemax OpticStudio 中设计的镜头模型,供 Speos 使用
2. Speos 用于在 CMOS 成像仪前生成光谱辐照度图
3. Lumerical FDTD和CHARGE,用于计算传感器的量子效率作为入射角和波长的函数
4. Speos 传感器系统SSS导出器,用于组合 Speos 和 Lumerical 结果,并生成传感器捕获的电子地图
由于此示例需要 Lumerical、Zemax OpticStudio 和 Speos 仿真,因此我们主要将自己限制为 Speos 仿真,如以下步骤所述:
第 1 步:使用 Zemax OpticStudio 进行镜头系统设计
在此步骤中,我们在Zemax OpticStudio中设计相机镜头系统,并导出该镜头系统的照明传递函数,并通过Speos(*.)将其格式化为可读文件。OPTdistortion)。降阶模型(ROM)生成的透镜模型称为Speos透镜系统(SLS)。此操作对于镜头系统只需完成一次,这使我们能够在之后在Speos中执行快速的光线追踪相机模拟。
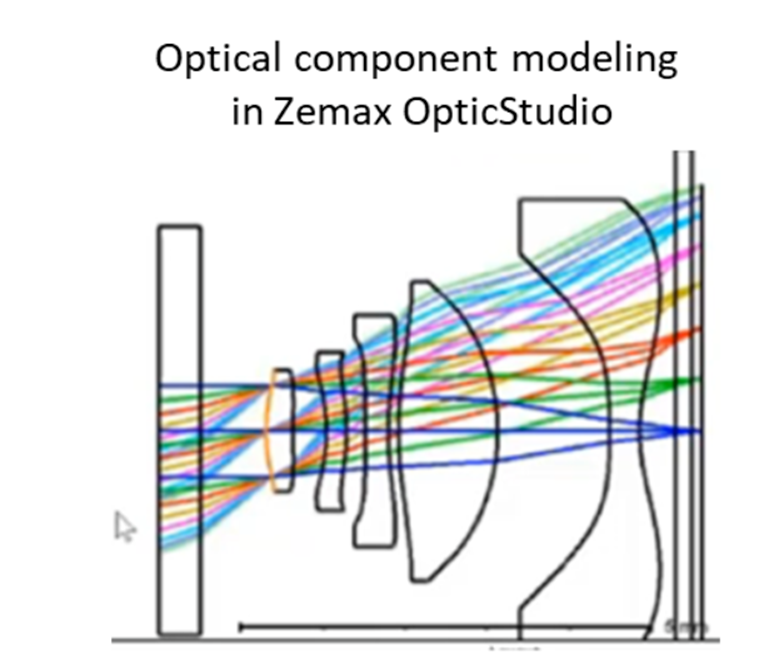
SLS可以将Zemax OpticStudio的主射线角曲线信息提取,生成 *.OPTdistortion文件用于Speos仿真。
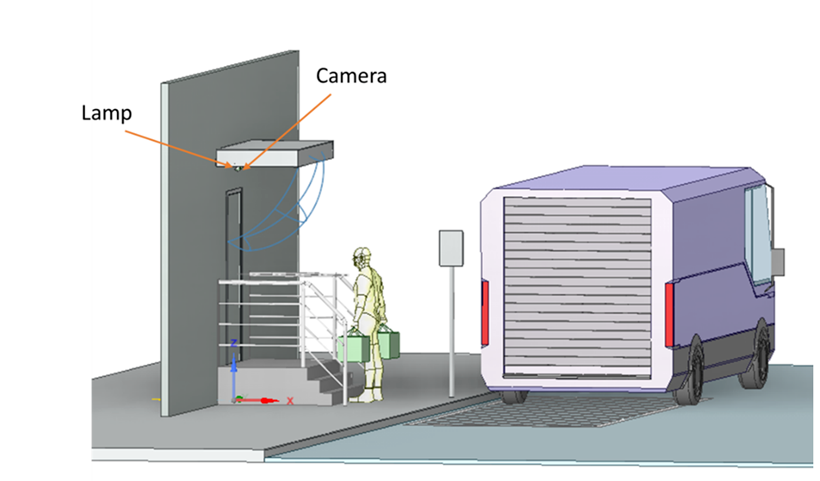
第 2 步:Speos仿真
*.OPTdistortion文件被导入到Speos相机传感器中,以定义相机系统的镜头性能,并在具有逼真照明条件的3D场景中评估传感器感知。我们运行光线追踪光度ROM相机模拟,比Speos中的完整镜头系统模拟快约100倍,并提取关键成像指标,如光谱辐照度图。CMOS成像器传感器前面的辐照度图是根据下面所示的完整3D场景计算的,该场景在不同的环境照明条件下,包括白天,黑夜和夜晚。
运算Speos的仿真,得到能量仿真结果,以下是日间光源条件下camera的成像结果:
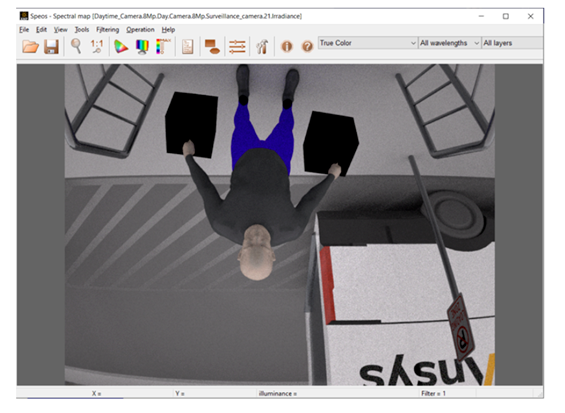
同样可以得到显示白天 3D 场景中测得的照度值图。
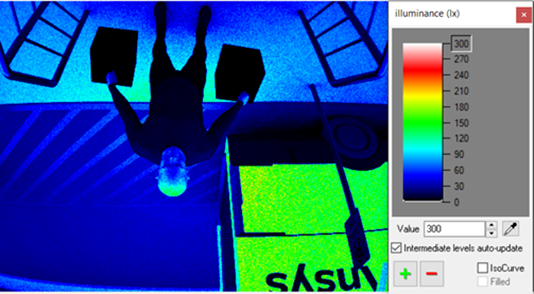
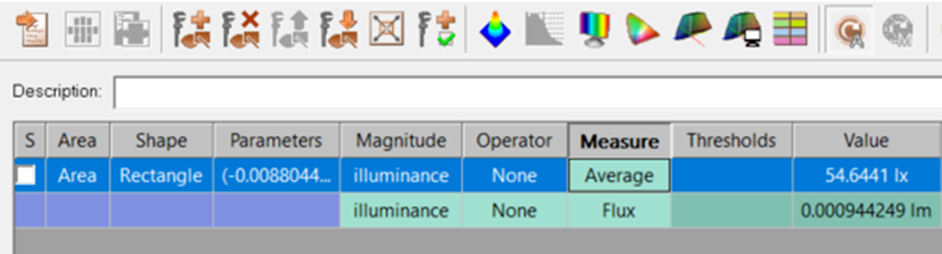
可以通过measurement工具定义传感器照度仿真结果的的测量区域,并捕获白天从场景到传感器的光。在测量信息表中,显示了传感器整个区域捕获的平均照度值。照度结果还使我们能够探索相机光学特性,例如不同传感器位置的失真,暗角和分辨率。
第 3 步:Lumerical Simulation
Speos在CMOS成像仪前模拟的光谱辐照度图需要与传感器的量子效率相结合,才能生成原始电子图。Lumerical FDTD和CHARGE工具已被用于量化所设计的CMOS传感器的量子效率。CMOS图像传感器由带有光学和电子元件的微观像素组成。主要的光学元件是微透镜和彩色滤光片,用于将所需波长的光聚焦在成像器底部硅衬底的正确点上。吸收的光子产生带电载流子,这些载流子被收集并传输以在电子侧进行检测。电子设备具有包括栅极和互连在内的组件,这些组件可能会干扰传感器内部的光路径。耦合光电仿真在FDTD和CHARGE中完成。
第 4 步:Speos 传感器系统导出器
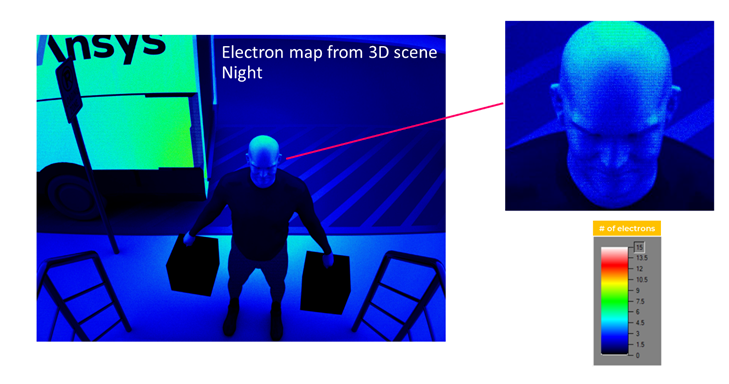
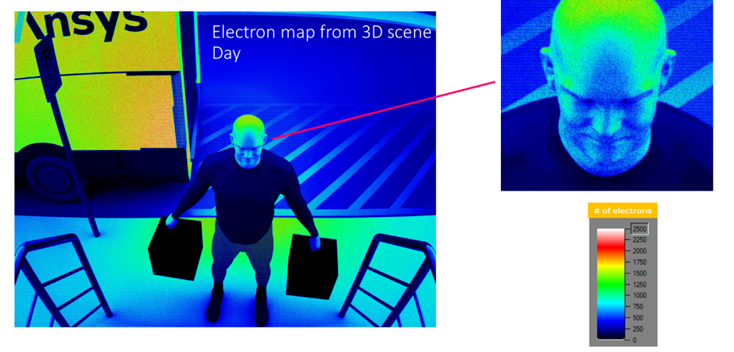
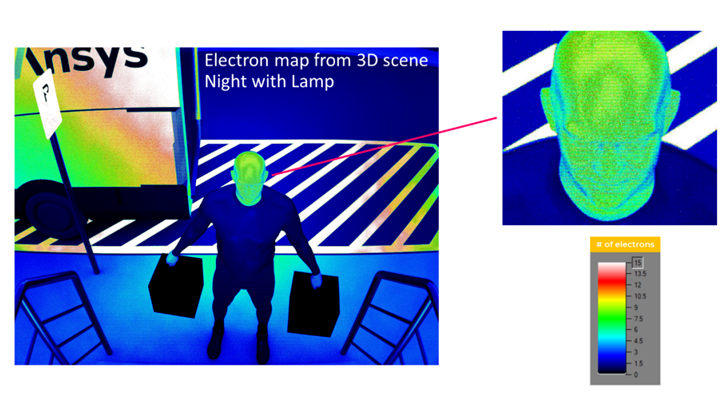
Speos传感器系统导出器是一种用于后处理Speos中相机传感器捕获的辐照度图的工具。为了根据每个像素收集的电子数或电流生成传感器记录的原始图像,我们使用Speos传感器系统导出器工具将Speos的光谱辐照度与Lumerical成像仪的EQE数据相结合。此工具首先根据辐照度图的乘积和相机积分时间计算 Speos 模拟的曝光图,这是 EQE *.json 文件中的可编辑参数。然后,根据EQE数据,该工具计算响应度,即每个入射功率收集的电荷速率,并将响应度乘以光谱曝光图以生成电子图。仿真结果显示了CMOS传感器在不同照明条件下(白天,晚上有灯和不带灯)下20ms积分时间和15,000 e-满井容量的电子地图的比较。
总结
在CMOS设计仿真流程中,设计人员可以联合Lumerical、Zemax、Speos分析整个系统的性能,尝试更多可能性设计分析,该案例也为后续的CMOS串接到宏观的场景图像仿真提供借鉴。
我有带有Logo图像的公司模型has_attached_file:logo我用他们的Logo创建了许多公司。现在,我需要添加新样式has_attached_file:logo,:styles=>{:small=>"30x15>",:medium=>"155x85>"}我是否应该重新上传所有旧数据以重新生成新样式?我不这么认为……或者有什么rake任务可以重新生成样式吗? 最佳答案 参见Thumbnail-Generation.如果rake任务不适合你,你应该能够在控制台中使用一个片段来调用重新处理!关于相关公司
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit
Unity自动旋转动画1.开门需要门把手先动,门再动2.关门需要门先动,门把手再动3.中途播放过程中不可以再次进行操作觉得太复杂?查看我的文章开关门简易进阶版效果:如果这个门可以直接打开的话,就不需要放置"门把手"如果门把手还有钥匙需要旋转,那就可以把钥匙放在门把手的"门把手",理论上是可以无限套娃的可调整参数有:角度,反向,轴向,速度运行时点击Test进行测试自己写的代码比较垃圾,命名与结构比较拉,高手轻点喷,新手有类似的需求可以拿去做参考上代码usingSystem.Collections;usingSystem.Collections.Generic;usingUnityEngine;u
之前说过10之后的版本没有3dScan了,所以还是9.8的版本或者之前更早的版本。 3d物体扫描需要先下载扫描的APK进行扫面。首先要在手机上装一个扫描程序,扫描现实中的三维物体,然后上传高通官网,在下载成UnityPackage类型让Unity能够使用这个扫描程序可以从高通官网上进行下载,是一个安卓程序。点到Tools往下滑,找到VuforiaObjectScanner下载后解压数据线连接手机,将apk文件拷入手机安装然后刚才解压文件中的Media文件夹打开,两个PDF图打印第一张A4-ObjectScanningTarget.pdf,主要是用来辅助扫描的。好了,接下来就是扫描三维物体。将瓶
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
我正在尝试使用Ruby2.0.0和Rails4.0.0提供的API从imgur中提取图像。我已尝试按照Ruby2.0.0文档中列出的各种方式构建http请求,但均无济于事。代码如下:require'net/http'require'net/https'defimgurheaders={"Authorization"=>"Client-ID"+my_client_id}path="/3/gallery/image/#{img_id}.json"uri=URI("https://api.imgur.com"+path)request,data=Net::HTTP::Get.new(path
2022/8/4更新支持加入水印水印必须包含透明图像,并且水印图像大小要等于原图像的大小pythonconvert_image_to_video.py-f30-mwatermark.pngim_dirout.mkv2022/6/21更新让命令行参数更加易用新的命令行使用方法pythonconvert_image_to_video.py-f30im_dirout.mkvFFMPEG命令行转换一组JPG图像到视频时,是将这组图像视为MJPG流。我需要转换一组PNG图像到视频,FFMPEG就不认了。pyav内置了ffmpeg库,不需要系统带有ffmpeg工具因此我使用ffmpeg的python包装p
📢博客主页:https://blog.csdn.net/weixin_43197380📢欢迎点赞👍收藏⭐留言📝如有错误敬请指正!📢本文由Loewen丶原创,首发于CSDN,转载注明出处🙉📢现在的付出,都会是一种沉淀,只为让你成为更好的人✨文章预览:一.分辨率(Resolution)1、工业相机的分辨率是如何定义的?2、工业相机的分辨率是如何选择的?二.精度(Accuracy)1、像素精度(PixelAccuracy)2、定位精度和重复定位精度(RepeatPrecision)三.公差(Tolerance)四.课后作业(Post-ClassExercises)视觉行业的初学者,甚至是做了1~2年
有这样的事吗?我想在Ruby程序中使用它。 最佳答案 试试这个http://csl.sublevel3.org/jp2a/此外,Imagemagick可能还有一些东西 关于ruby-是否有将图像文件转换为ASCII艺术的命令行程序或库?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/6510445/