文章目录
安装见:https://blog.csdn.net/qq_43529415/article/details/100847887
CUDA 和cudnn的安装见:https://blog.csdn.net/qq_44824148/article/details/120875736
BITVehicle_Dataset
链接:https://pan.baidu.com/s/1TiY-T9NKFrgSiDqLIkvMbw
提取码:h09m
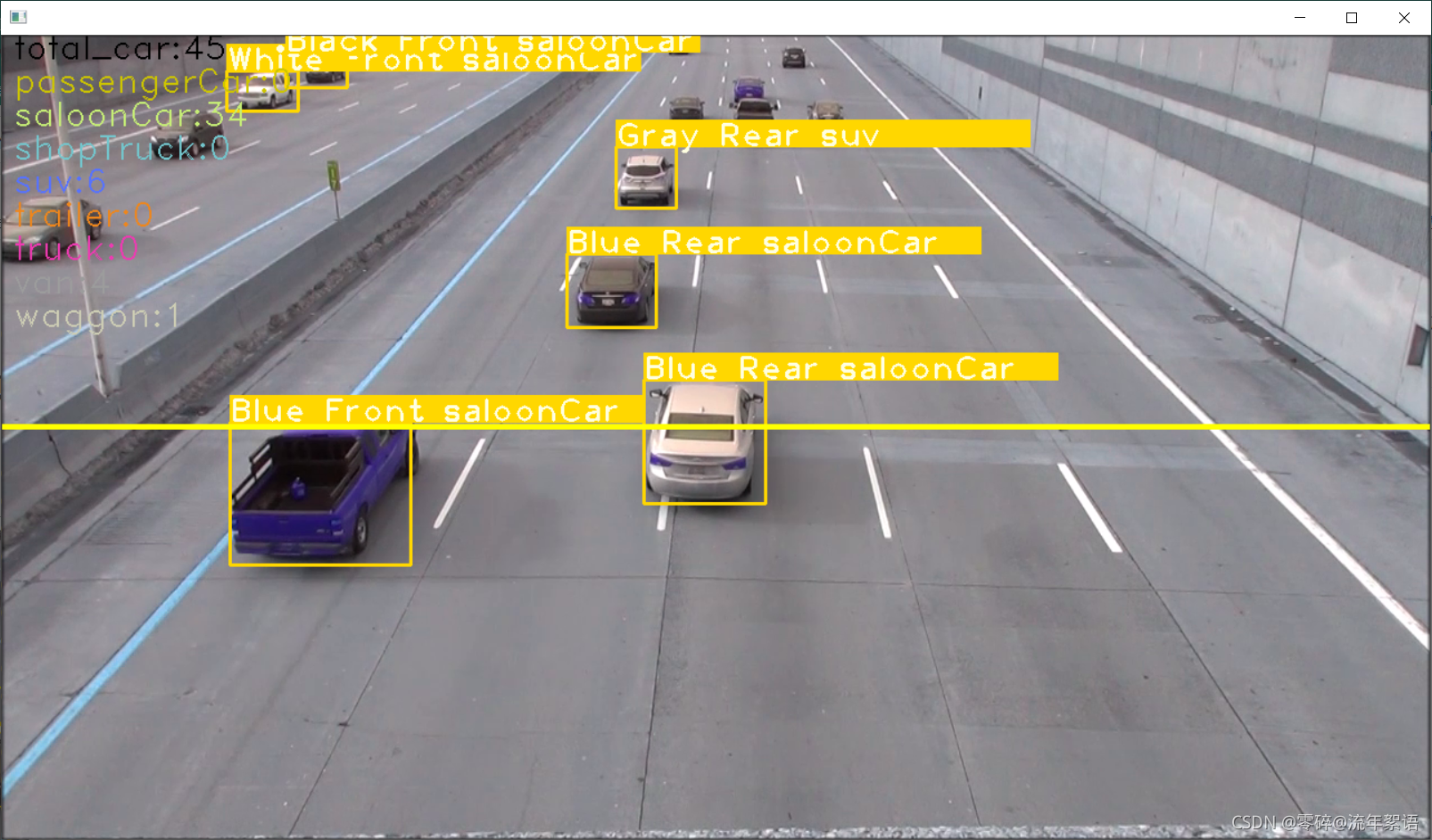
使用yoloV3模型进行目标检测
使用sort算法,其中使用卡尔曼滤波器对目标位置进行估计,利用匈牙利算法进行目标关联。
利用虚拟线圈的思想实现车辆目标的计数,完成车流量的统计。
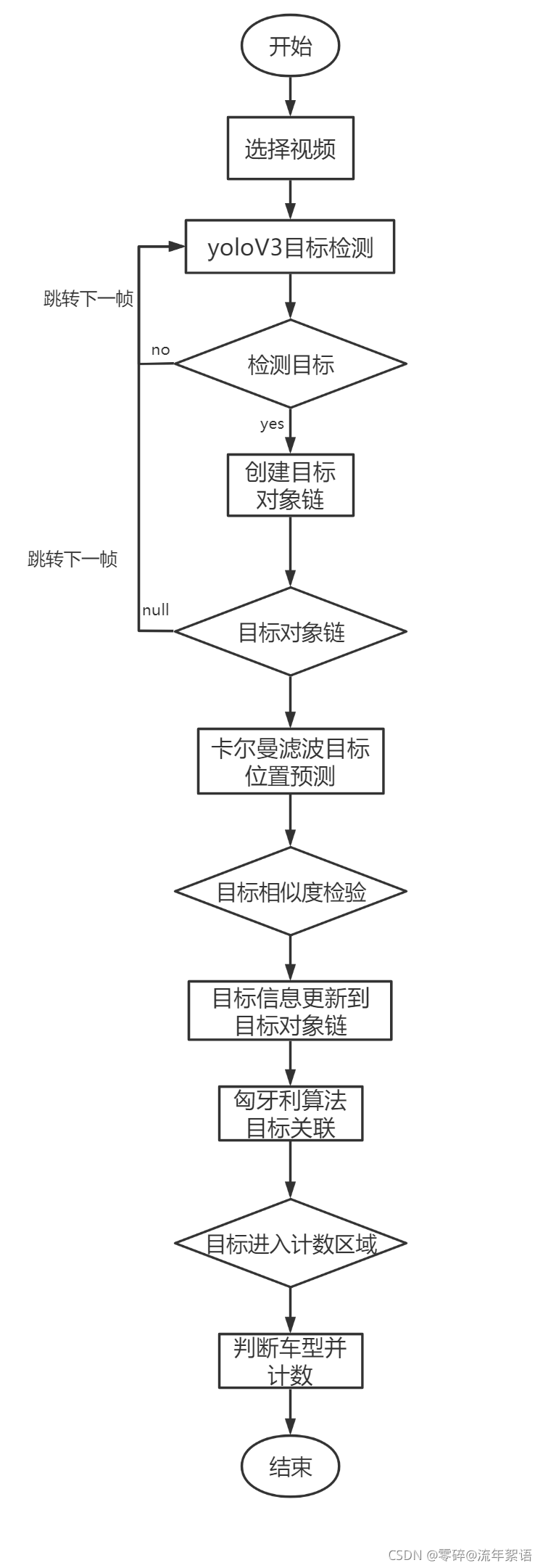
进行目标对象的选框,以及目标对象中心坐标的存取
def cls_draw_bbox(self, output, orig_img):
"""
1. predict vehicle's attributes based on bbox of vehicle
2. draw bbox to orig_img
"""
print("3.2")
labels = []
pt_1s = []
pt_2s = []
types=[]
directions=[]
centers = [] #当前帧的检测框中心点
center_ys=[]
classID = [] #当前帧的种类ID
# 1
for det in output:
# rectangle points
pt_1 = tuple(det[1:3].int()) # the left-up point
pt_2 = tuple(det[3:5].int()) # the right down point
# print("p1", pt_1)
# print(type(pt_1))
# print("p2", pt_2)
p1_1 = pt_1[0].item()
p1_2 = pt_1[1].item()
p2_1 = pt_2[0].item()
p2_2 = pt_2[1].item()
(center_x,center_y)=(int((p1_1+p2_1)/2),int((p1_2+p2_2)/2))
centers.append((center_x,center_y))
# classID.append()
print(centers)
pt_1s.append(pt_1)
pt_2s.append(pt_2)
# print("det:", det)
# turn BGR back to RGB
# print(type(orig_img[pt_1[1]: pt_2[1], pt_1[0]: pt_2[0]][:, :, ::-1]))
# print(orig_img[pt_1[1]: pt_2[1],pt_1[0]: pt_2[0]][:, :, ::-1])
orig_list = orig_img[pt_1[1]: pt_2[1], pt_1[0]: pt_2[0]][:, :, ::-1]
if (orig_list.size == 0):
return 1
ROI = Image.fromarray(orig_img[pt_1[1]: pt_2[1], pt_1[0]: pt_2[0]][:, :, ::-1])
# print("ROI:",ROI)
# ROI.show()
# call classifier to predict
car_color, car_direction, car_type = self.classifier.predict(ROI)
label = str(car_color + ' ' + car_direction + ' ' + car_type)
labels.append(label)
types.append(car_type)
center_ys.append(center_y)
directions.append(car_direction)
print('=> predicted label: ', label)
print("center_ys:",center_ys)
# print("directions:",directions)
# print("types:",types)
# print("labels:",labels)
# print("centers:",centers)
# 2
color = (0, 215, 255)
for i, det in enumerate(output ):
pt_1 = pt_1s[i]
pt_2 = pt_2s[i]
# draw bounding box
cv2.rectangle(orig_img, pt_1, pt_2, color, thickness=2)
print("pt_1:", pt_1)
print("pt_2:", pt_2)
# get str text size
txt_size = cv2.getTextSize(
label, cv2.FONT_HERSHEY_PLAIN, 2, 2)[0]
# pt_2 = pt_1[0] + txt_size[0] + 3, pt_1[1] + txt_size[1] + 5
pt_2 = pt_1[0] + txt_size[0] + 3, pt_1[1] - txt_size[1] - 5
# draw text background rect
cv2.rectangle(orig_img, pt_1, pt_2, color, thickness=-1) # text
# draw text
cv2.putText(orig_img, labels[i], (pt_1[0], pt_1[1]), # pt_1[1] + txt_size[1] + 4
cv2.FONT_HERSHEY_PLAIN, 2, [225, 255, 255], 2)
# center_ys=list(center_ys)
# directions=list(directions)
# types=list(types)
# print("type",type(center_ys))
# print("type", type(directions))
# print("type", type(types))
if isinstance(center_ys, list) and isinstance(directions,list) and isinstance(types,list):
return center_ys,directions,types
else:
center_ys.append(1000)
directions.append('front')
types.append('sss')
return center_ys, directions, types
当前帧目标的跟踪框集合
def update(self, dets):
self.frame_count += 1
# 在当前帧逐个预测轨迹位置,记录状态异常的跟踪器索引
# 根据当前所有的卡尔曼跟踪器个数(即上一帧中跟踪的目标个数)创建二维数组:行号为卡尔曼滤波器的标识索引,列向量为跟踪框的位置和ID
trks = np.zeros((len(self.trackers), 5)) # 存储跟踪器的预测
to_del = [] # 存储要删除的目标框
ret = [] # 存储要返回的追踪目标框
# 循环遍历卡尔曼跟踪器列表
for t, trk in enumerate(trks):
# 使用卡尔曼跟踪器t产生对应目标的跟踪框
pos = self.trackers[t].predict()[0]
# 遍历完成后,trk中存储了上一帧中跟踪的目标的预测跟踪框
trk[:] = [pos[0], pos[1], pos[2], pos[3], 0]
# 如果跟踪框中包含空值则将该跟踪框添加到要删除的列表中
if np.any(np.isnan(pos)):
to_del.append(t)
# numpy.ma.masked_invalid 屏蔽出现无效值的数组(NaN 或 inf)
# numpy.ma.compress_rows 压缩包含掩码值的2-D 数组的整行,将包含掩码值的整行去除
# trks中存储了上一帧中跟踪的目标并且在当前帧中的预测跟踪框
trks = np.ma.compress_rows(np.ma.masked_invalid(trks))
# 逆向删除异常的跟踪器,防止破坏索引
for t in reversed(to_del):
self.trackers.pop(t)
# 将目标检测框与卡尔曼滤波器预测的跟踪框关联获取跟踪成功的目标,新增的目标,离开画面的目标
matched, unmatched_dets, unmatched_trks = associate_detections_to_trackers(dets, trks)
# 将跟踪成功的目标框更新到对应的卡尔曼滤波器
for t, trk in enumerate(self.trackers):
if t not in unmatched_trks:
d = matched[np.where(matched[:, 1] == t)[0], 0]
# 使用观测的边界框更新状态向量
trk.update(dets[d, :][0])
# 为新增的目标创建新的卡尔曼滤波器对象进行跟踪
for i in unmatched_dets:
trk = KalmanBoxTracker(dets[i, :])
self.trackers.append(trk)
# 自后向前遍历,仅返回在当前帧出现且命中周期大于self.min_hits(除非跟踪刚开始)的跟踪结果;如果未命中时间大于self.max_age则删除跟踪器。
# hit_streak忽略目标初始的若干帧
i = len(self.trackers)
for trk in reversed(self.trackers):
# 返回当前边界框的估计值
d = trk.get_state()[0]
# 跟踪成功目标的box与id放入ret列表中
if (trk.time_since_update < 1) and (trk.hit_streak >= self.min_hits or self.frame_count <= self.min_hits):
ret.append(np.concatenate((d, [trk.id + 1])).reshape(1, -1)) # +1 as MOT benchmark requires positive
i -= 1
# 跟踪失败或离开画面的目标从卡尔曼跟踪器中删除
if trk.time_since_update > self.max_age:
self.trackers.pop(i)
# 返回当前画面中所有目标的box与id,以二维矩阵形式返回
if len(ret) > 0:
print("321a:", np.concatenate(ret))
return np.concatenate(ret)
print("123a:", np.empty((0, 5)))
return np.empty((0, 5))

总的来说,我对ruby还比较陌生,我正在为我正在创建的对象编写一些rspec测试用例。许多测试用例都非常基础,我只是想确保正确填充和返回值。我想知道是否有办法使用循环结构来执行此操作。不必为我要测试的每个方法都设置一个assertEquals。例如:describeitem,"TestingtheItem"doit"willhaveanullvaluetostart"doitem=Item.new#HereIcoulddotheitem.name.shouldbe_nil#thenIcoulddoitem.category.shouldbe_nilendend但我想要一些方法来使用
我试图在一个项目中使用rake,如果我把所有东西都放到Rakefile中,它会很大并且很难读取/找到东西,所以我试着将每个命名空间放在lib/rake中它自己的文件中,我添加了这个到我的rake文件的顶部:Dir['#{File.dirname(__FILE__)}/lib/rake/*.rake'].map{|f|requiref}它加载文件没问题,但没有任务。我现在只有一个.rake文件作为测试,名为“servers.rake”,它看起来像这样:namespace:serverdotask:testdoputs"test"endend所以当我运行rakeserver:testid时
作为我的Rails应用程序的一部分,我编写了一个小导入程序,它从我们的LDAP系统中吸取数据并将其塞入一个用户表中。不幸的是,与LDAP相关的代码在遍历我们的32K用户时泄漏了大量内存,我一直无法弄清楚如何解决这个问题。这个问题似乎在某种程度上与LDAP库有关,因为当我删除对LDAP内容的调用时,内存使用情况会很好地稳定下来。此外,不断增加的对象是Net::BER::BerIdentifiedString和Net::BER::BerIdentifiedArray,它们都是LDAP库的一部分。当我运行导入时,内存使用量最终达到超过1GB的峰值。如果问题存在,我需要找到一些方法来更正我的代
Rails2.3可以选择随时使用RouteSet#add_configuration_file添加更多路由。是否可以在Rails3项目中做同样的事情? 最佳答案 在config/application.rb中:config.paths.config.routes在Rails3.2(也可能是Rails3.1)中,使用:config.paths["config/routes"] 关于ruby-on-rails-Rails3中的多个路由文件,我们在StackOverflow上找到一个类似的问题
我需要从一个View访问多个模型。以前,我的links_controller仅用于提供以不同方式排序的链接资源。现在我想包括一个部分(我假设)显示按分数排序的顶级用户(@users=User.all.sort_by(&:score))我知道我可以将此代码插入每个链接操作并从View访问它,但这似乎不是“ruby方式”,我将需要在不久的将来访问更多模型。这可能会变得很脏,是否有针对这种情况的任何技术?注意事项:我认为我的应用程序正朝着单一格式和动态页面内容的方向发展,本质上是一个典型的网络应用程序。我知道before_filter但考虑到我希望应用程序进入的方向,这似乎很麻烦。最终从任何
我在我的项目中添加了一个系统来重置用户密码并通过电子邮件将密码发送给他,以防他忘记密码。昨天它运行良好(当我实现它时)。当我今天尝试启动服务器时,出现以下错误。=>BootingWEBrick=>Rails3.2.1applicationstartingindevelopmentonhttp://0.0.0.0:3000=>Callwith-dtodetach=>Ctrl-CtoshutdownserverExiting/Users/vinayshenoy/.rvm/gems/ruby-1.9.3-p0/gems/actionmailer-3.2.1/lib/action_mailer
刚入门rails,开始慢慢理解。有人可以解释或给我一些关于在application_controller中编码的好处或时间和原因的想法吗?有哪些用例。您如何为Rails应用程序使用应用程序Controller?我不想在那里放太多代码,因为据我了解,每个请求都会调用此Controller。这是真的? 最佳答案 ApplicationController实际上是您应用程序中的每个其他Controller都将从中继承的类(尽管这不是强制性的)。我同意不要用太多代码弄乱它并保持干净整洁的态度,尽管在某些情况下ApplicationContr
我想向我的Controller传递一个参数,它是一个简单的复选框,但我不知道如何在模型的form_for中引入它,这是我的观点:{:id=>'go_finance'}do|f|%>Transferirde:para:Entrada:"input",:placeholder=>"Quantofoiganho?"%>Saída:"output",:placeholder=>"Quantofoigasto?"%>Nota:我想做一个额外的复选框,但我该怎么做,模型中没有一个对象,而是一个要检查的对象,以便在Controller中创建一个ifelse,如果没有检查,请帮助我,非常感谢,谢谢
我注意到像bundler这样的项目在每个specfile中执行requirespec_helper我还注意到rspec使用选项--require,它允许您在引导rspec时要求一个文件。您还可以将其添加到.rspec文件中,因此只要您运行不带参数的rspec就会添加它。使用上述方法有什么缺点可以解释为什么像bundler这样的项目选择在每个规范文件中都需要spec_helper吗? 最佳答案 我不在Bundler上工作,所以我不能直接谈论他们的做法。并非所有项目都checkin.rspec文件。原因是这个文件,通常按照当前的惯例,只
我正在使用active_admin,我在Rails3应用程序的应用程序中有一个目录管理,其中包含模型和页面的声明。时不时地我也有一个类,当那个类有一个常量时,就像这样:classFooBAR="bar"end然后,我在每个必须在我的Rails应用程序中重新加载一些代码的请求中收到此警告:/Users/pupeno/helloworld/app/admin/billing.rb:12:warning:alreadyinitializedconstantBAR知道发生了什么以及如何避免这些警告吗? 最佳答案 在纯Ruby中:classA