目录
1.MPC → Model PredictIve Control
(1)处理对象:输入输出之间有交互作用的多输入多输出系统(MIMO System)
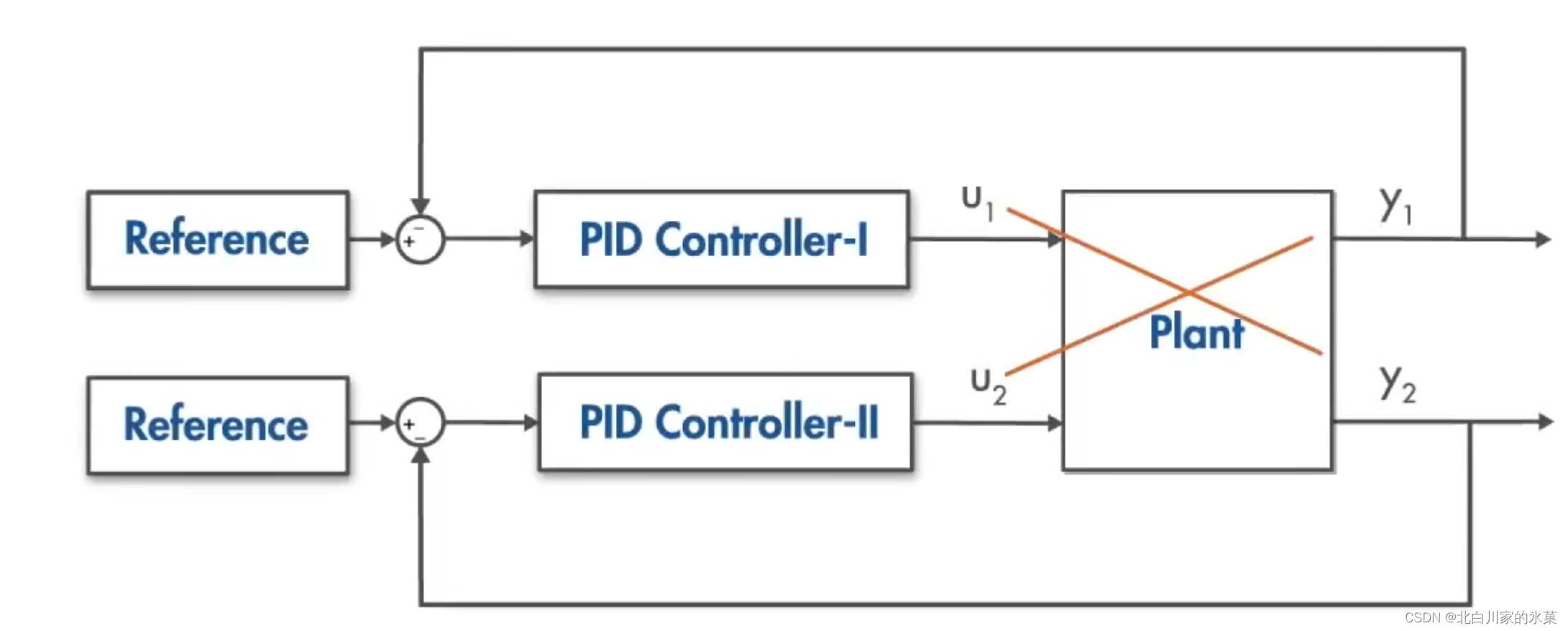
(2)PID 对于该类型系统的局限性:
① 如上图所示,两个回路之间没有交叉,就像二者是相互独立一样
② 如果系统(Plant)足够大,因为调参十分困难
MPC的优势:
① 可以处理多变量问题
② 可以添加约束
e.g.在驾驶时,汽车有期望的轨迹,同时有加速约束
③ 有预览功能(类似前馈),以改善控制器性能
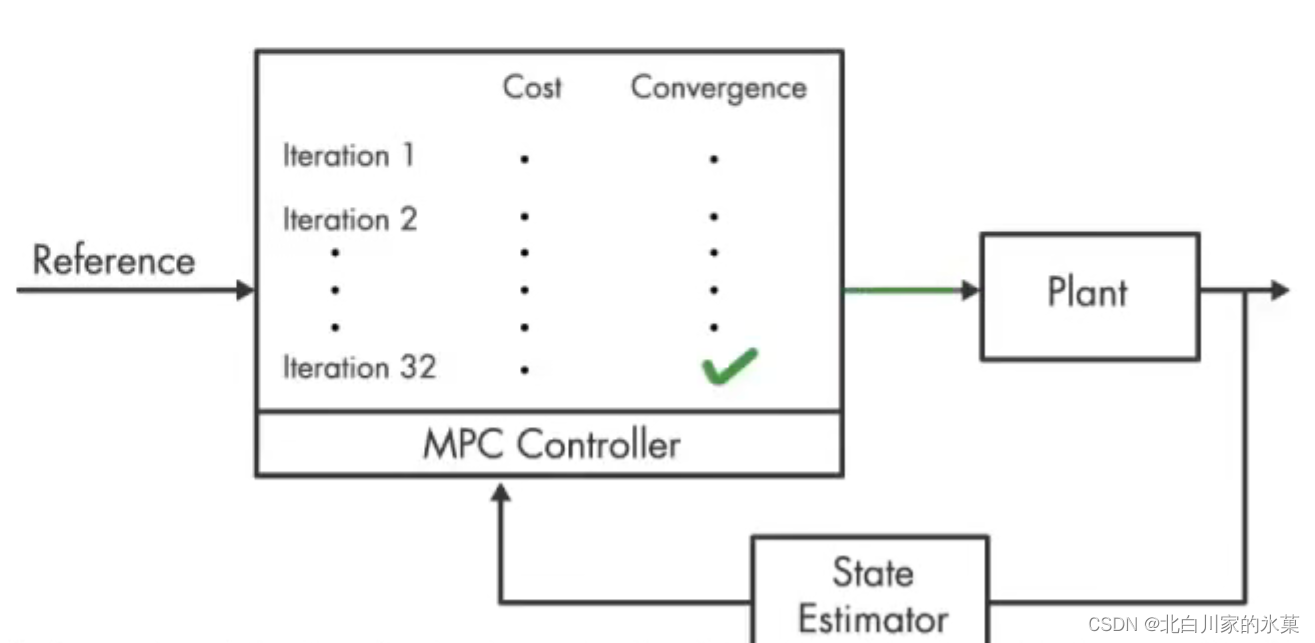
(3)MPC硬件条件
需要功能强大的,内存大的处理器,因为每个时间步骤都需要在线优化问题
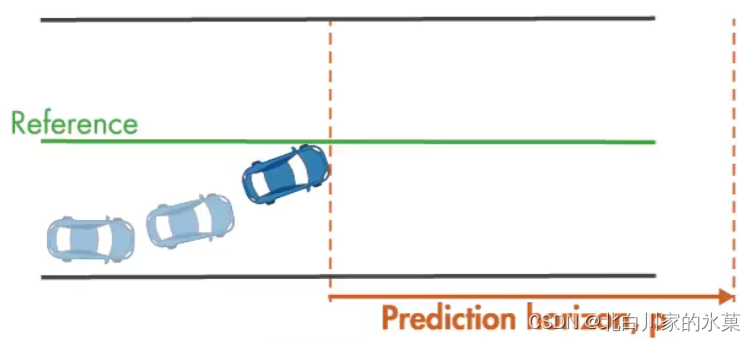
以如图的过程为例,期望汽车沿中线运动:
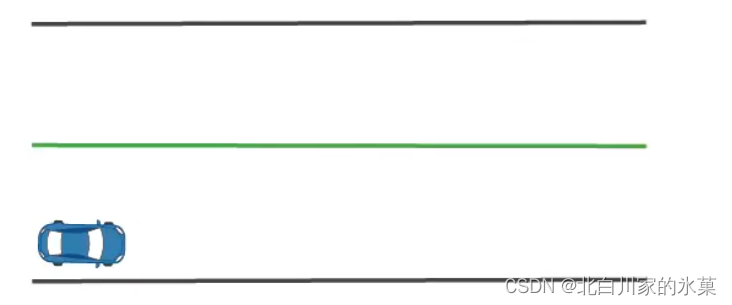
MPC在该过程中的作用如下:
(1)首先,预测一条p步之后可以到达中线的路径(这里有个问题,这个p如何选择呢?选择过少会不会导致无解?过多会不会降低效率?)该过程涉及了汽车模型本身的使用。
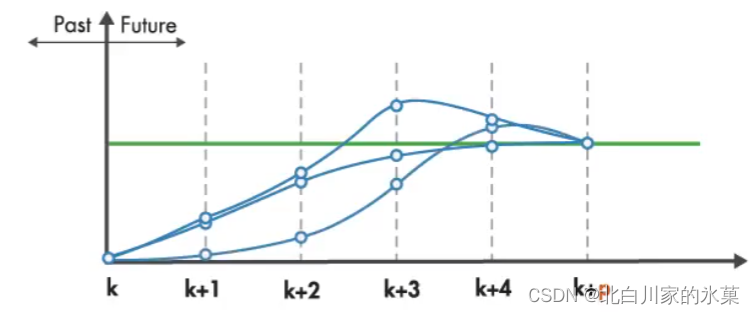
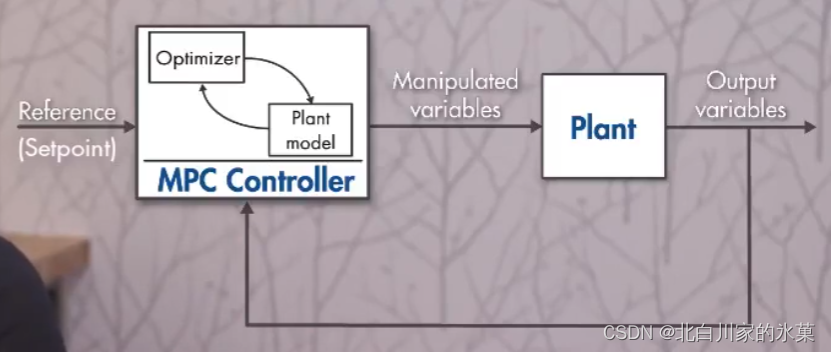
显然这种路径有无穷多条,我们选择“代价(cost)"最小的一条,该过程由优化器(optimizer)完成。对于这种情况,对应的cost包括:
① 汽车在此p步中,每一步的位置都会与中线有一个相对应的偏差值,我们想要这个偏差值之和最小
② 汽车每一次的打舵量要尽可能的小,否则会让乘客十分不舒服,即打舵量之和应该也最小
综上,应该让二者加权和最小,即:
我们总会找到一条使J最小的路径
一般地,有:
(2)进行条件约束,例如车必须在车道里,同时方向盘的转角应该有一个范围
(3)进行该路径中p步中的第一步,即进行响应角度的方向盘转动,而将后面的步骤舍弃
(4)在新的起点重复以上过程,下一次预测的结果可能与上次的预测不同,因为可能有干扰的存在(风,湿滑的路面)
根据上述过程,我们可知,我们每次运动后都在预测未来p步的路径,因此我们所谓的”预测视界“是向前运动的,因此MPC也被称为后退视界控制。
(1)基本参数
① 采样时间 → 决定控制器执行控制算法的速率
太大:无法快速处理扰动
太小:计算负荷过大
因此一般情况下选择:
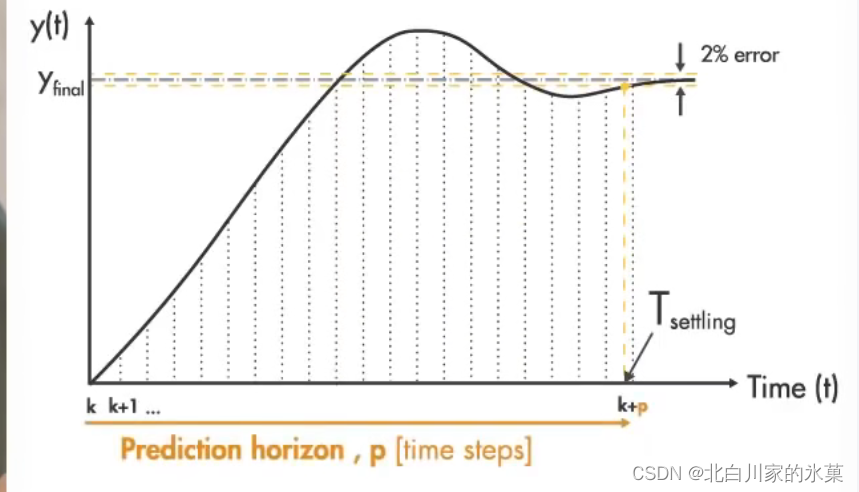
② 预测范围:即预测未来事件步长的数量
太短:假如刹车需要5s,但是我只能预测到两秒外的视界,距离交通灯2s路程时开始制动,此时已经来不及了,我们必定会冲过头
太长:可以涵盖之后很长一段时间内的范围,但是如果发生突发情况,比如行人过马路,此时我们必须停车,那么之后就要重新预测,假如我们预测了未来20s的事件,在5s时发生了行人过马路事件,那么后面15s的内容我们就白预测了,即浪费了算力。当然,任何长度的预测范围都可能发生突发情况,但是预测范围越长,我们进行无效预测的时间越长,出现无效预测的概率越大。
因此,我们必须选择一个涵盖整个系统动态的预测范围,但是也不宜太长
建议选择步长20-30
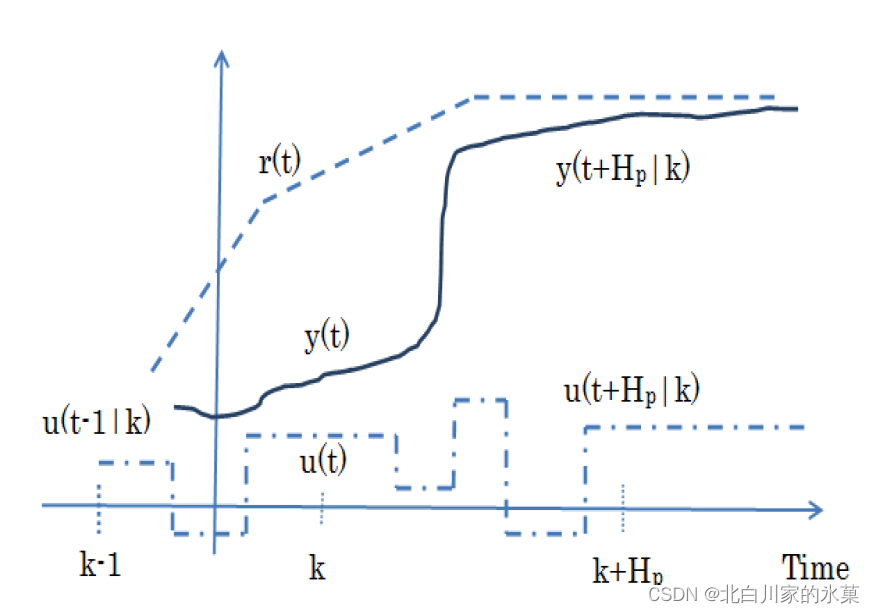
③ 控制范围:控制移动到时间步长m的次数
步长m较大时,可以获得更好的预测,但是会增加复杂性,我们甚至可以是控制范围与预测范围相同,但是一般只有前几个控制动作才对输出行为有影响,因此控制范围最好是预测范围的10%到20%,至少2-3步
进一步理解:
假如”我“是一个学生,“我”的能力对于导师而言是完全可知的,在工程上,就是”我“的模型是完全可知的,导师会给我安排学习任务,假如导师在知道我能力的情况下做好了未来七天的计划(预测范围),但是只给我安排了五天的学习任务(控制范围),但在我完成一天学习后,我可能超额完成任务,也可能不达标(外界干扰导致没有达到预测结果),因此我只完成被安排的学习任务的第一天的任务,在此之后,导师再次制定七天之后的计划,并给我安排下五天的计划。长此以往,导师发现,制定七天的任务太多了,会浪费他宝贵的时间,因此之后改为制定五天计划,安排三天计划。
④ 硬约束和软约束:硬约束必须服从,软约束不一定服从,如果全是硬约束,比如输入输出全部采用硬约束,那么可能会导致无法解决优化问题
软约束可以通过优化问题保证违反程度较小
⑤ 权重:
通过权衡来衡量竞争目标之间的权重(如输入和输出有不同权重)
同时,对于同一个组,我们可以对不同的成员分配权重(如第一输出和第二输出有不同权重)
(1)线性系统,线性约束条件,有二次cost函数→ 可以使用线性MPC
(2)非线性系统,同样可以使用线性MPC,原理是线性化
如:在自适应MPC中,随着运行条件变化,工作点也变化,因此可以动态地在工作点附近进行线性化,从而动态获得线性模型
注:对于自适应MPC,在不同运行条件下,状态数和约束数不会改变
如果随着操作条件变化,状态数改变:使用增益预定MPC,在感兴趣的工作点进行离线显性化,针对每个工作点设计线性
(3)如果非线性系统难以进行线性化,可以使用非线性MPC,此时做出的预测更加准确,但同时,优化问题变得不凸,即可能有很多局部最优解,如图:

I.(1)模型简化,可以减少状态数量
(2)预测范围适当减小
(3)控制范围适当减小
(4)减少约束数量
(5)降低数据表示精度
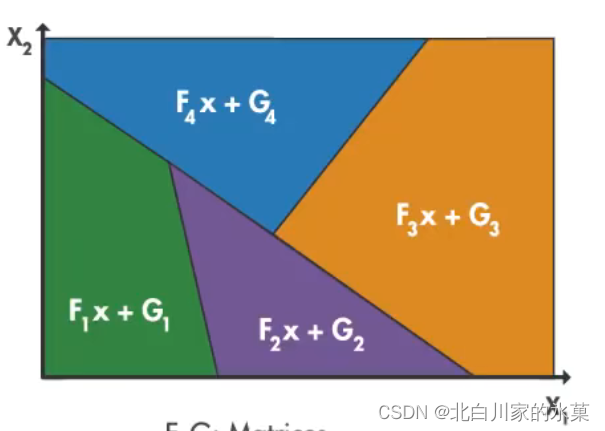
II.当采样时间特别小时,可以采用显式MPC(Implicit MPC)
显式MPC特点:离线解决问题,而不是在线优化,对于范围内每个x值,都预先计算最佳解,
III. 采用次优解决方案
如果想在采样时间内找到解决方案,同时还有多余时间执行其他任务,可以确定迭代次数最大值,当达到最大次数时,停止最优化
步骤:
(1)确定模型
(2)进行预测
(3)滚动优化
(4)误差补偿
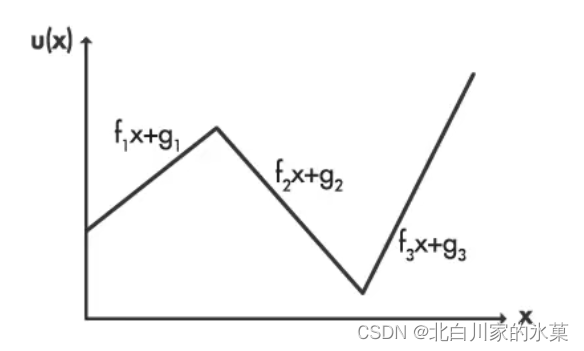
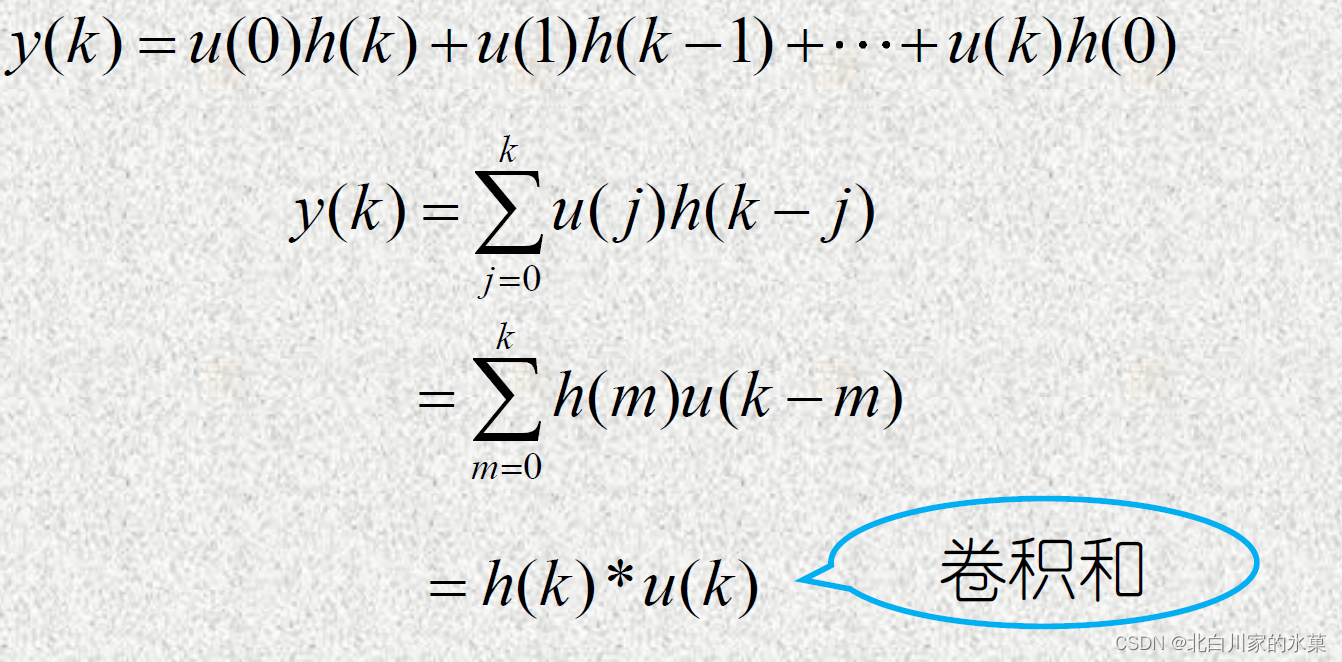
对于模型已知的系统,其单位脉冲响应在每个采样时刻都是可知的,根据离散卷积定理,此时输出可以用输入和单位脉冲响应的卷积计算
假设在k+1时刻开始输入信号,对等式两侧进行差分,则在k+1时刻及其后,有:
.
.
这里需要注意一点,由于控制范围是m,预测范围为p,一般情况下,控制范围比预测范围要小一点,因此m会小于p,而控制范围反应的是输入信号,因此u只有m个序号,即从k到k+m-1,在第m步预测之后,后面的累加项一直都是m个,因为在第m个采样时间后,由于此时已经超出控制范围,在此之后,输入量保持上一时刻不变,因此取差分后为0
整理为矩阵形式,如下:
接下来进行滚动优化,优化原则是代价函数的值最小,代价函数分为以下几个部分:
首先,我们希望真实输出与期望轨迹之间的偏差平方和最小,即:
其中是预测的轨迹,可以通过真实输出与参考输出表示,即:
这相当于是一个滤波,在[0,1]之间,在i足够大时,
趋近于参考值
另外地,我们希望每次输入的偏差之和小一点,以让用户有更好的体验,则有:
则整体的代价函数为:
其中Q、R分别为两项代价的权重
每个元素可以不一样,这样可以分配各个状态变量内部的权重
写成矩阵形式为:
一般地,Q和R都是对角矩阵
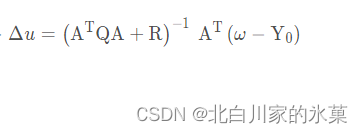
对求偏导数,有:
得:
最后进行误差补偿:
假如在k时刻,我们获得了之后p个时刻的预测值:
在k+1时刻,我们获得了的真实值
则我们可以评估预测的误差:
设补偿系数为h,h一般为0.5,这里注意下面的公式没有打错,一直都是用k+1点的误差补偿,所以才需要一个补偿系数,因为其他点的误差不见得等于k+1点的误差
则补偿后,有:
.
.
.
用矩阵表示,为:
本质上这是一个状态反馈
则根据滚动预测原则:
其中S为移位矩阵(p*p)
可能看到这里有点乱,我其实一开始也乱了,但是这里捋顺一下思路就好了,乱的原因主要是变量太多,难以区分。
总结:整体的思路是这样的:
我们首先对于这个模型的单位脉冲响应已经得知,那么我们可以获得矩阵A,根据卷积定理,我们可以获得输入变化量,输出变化量,输出初态的关系,即:
其实根据我个人理解,这个也可以认为是:响应=零输入响应+零状态响应
这个式子只是一个理论基础,用处是告诉我们:只要你知道一个输入变化量,我们就可以预测这个系统的输出
那么这个输入变化量他可不是乱取的,他是有备而来,这就是所谓的优化问题,根据上述推导的公式我们可以得知,取何值时可以得到最优解
由于模型有误差,再加上可能存在扰动之类的问题,因此我们需要加一个反馈校正,在这里选择的是状态反馈,我们的目的是在目前的时间点,进行预测之后,对这个预测进行合理的矫正,给他加个buff,那么这个buff是怎么算出来的呢,我们不是知道当前时间点的真实值吗,并且我们肯定有之前预测的此刻的预测值数据,我们做一个差,此时我们就知道偏差是多少,乘以一个合适的H矩阵,加上原来的预测值,可以让预测更合理。
当然,我们说这是一个滚动预测过程,那么滚动体现在何处呢?我们预测完这个时刻后,一定要来到下一个时刻,那么到达“下一个”时刻(k+2)时,k+1就成了过去时,k+1的预测值又可以用来和k+2真实值作差,评估误差,以此类推,以完成滚动,这时S矩阵便派上用场。
基本的原理和冲激响应模型是一样滴,只不过使用的模型不一样
我们不妨设E=Y-R=X,即用状态变量表示
设在k时刻,初始误差为,其中
是一个向量,因为他可能有很多输出
则根据现代控制理论的知识:
若我们设
则有:
.
.
.
将上面一坨公式整理为矩阵形式:
其中,
为
到
向量组合,值得注意的是,
到
在这里是预测值,即在k点对未来做的预测,我懒得加帽子了。N为预测范围
记
对于MIMO系统,由于有多个输入,则u为p维向量,所以B为n×p矩阵,且C矩阵上面应该有n行0,
M:(N+1)n×n C:(N+1)n×Np :(N+1)n×1
:Np×1
对于代价函数:
其中最后一项是final cost,由于其比过程误差更重要,所以要单独拿出来
整理代价函数:
其中:
代入:
得:
由于J是一个标量,因此内部任何一个式子都是标量,同时:
互相成转置关系,可以合并
令:
则:
最后是约束的添加
对于matlab中的quadprog函数,调用方法如下:
[x,fval,exitflag]=quadprog(H,f,A,b,Aeq,beq,lb,ub,x0,options)
应用时,首先对于的限制可以用lb和ub表示
对于状态变量,若有:
代入模型:
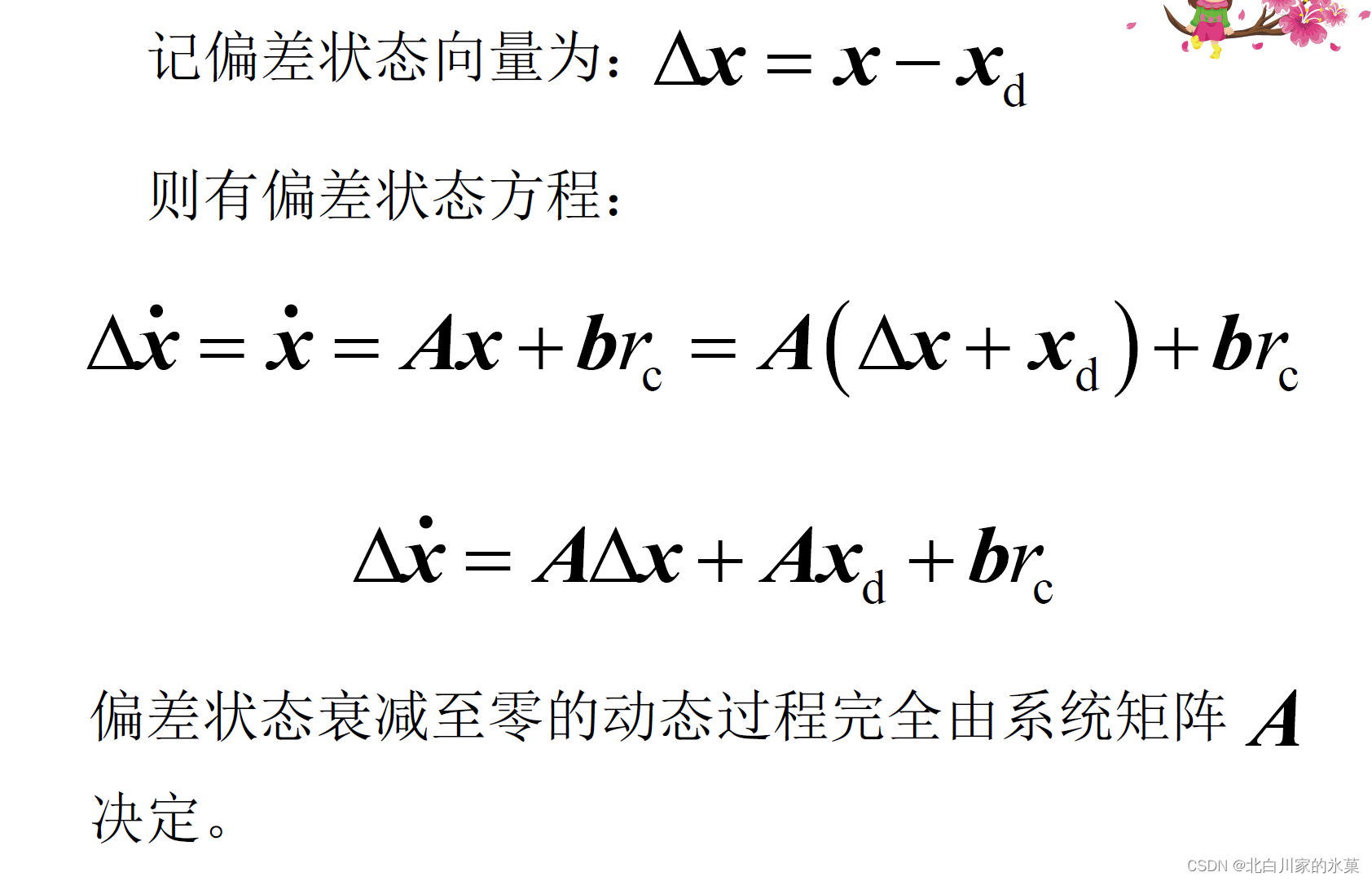
深入理解:
对代价函数求导后,可以得到一个和
的关系,本质上就是得到一个输入和状态空间的关系,则输入和状态有:
的关系,本质上,这是一个状态反馈。对于完全能控的系统,状态反馈可以任意配置极点,当然可以保证极点在单位圆内,则系统可以镇定。
这里可以进一步定量推导:
设:
其中为可测外部干扰变量
两边取微分:
输出:
进一步地:
.
.
.
这个推法和前面差不多,不多说了
则有:
其中:
设参考输入为
定义:
代入
令
则:
极值为:
这里计算时注意,由于J是个标量,因此其中相加的几个量都是标量,则:
我们只需要第一个元素,即:
不妨设:
即:
是对于未来参考输入的前馈补偿
是对于可预测扰动的前馈补偿
是状态反馈
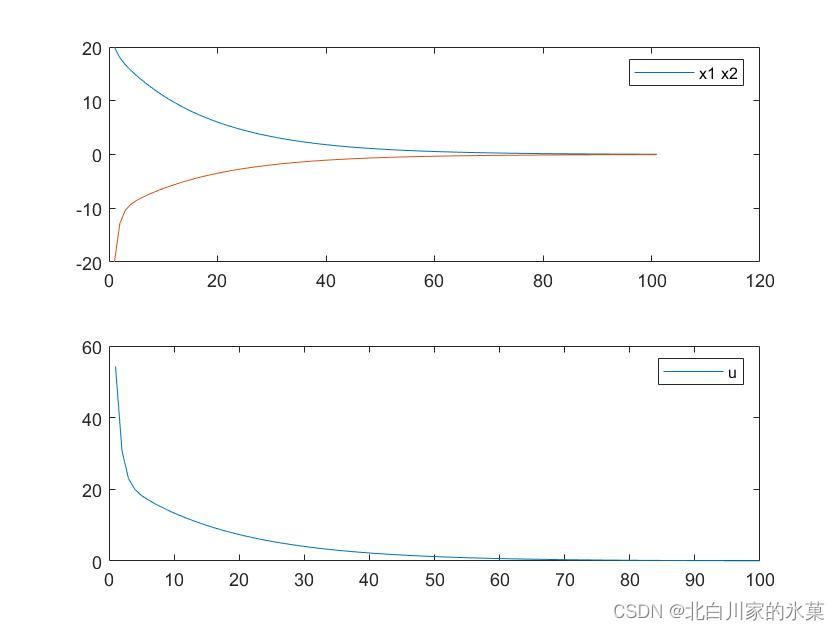
设系统状态空间方程为:
对于该系统,零输入响应如图:
其实从系统A矩阵可以看出,该系统特征值在单位圆外面,所以肯定是发散的
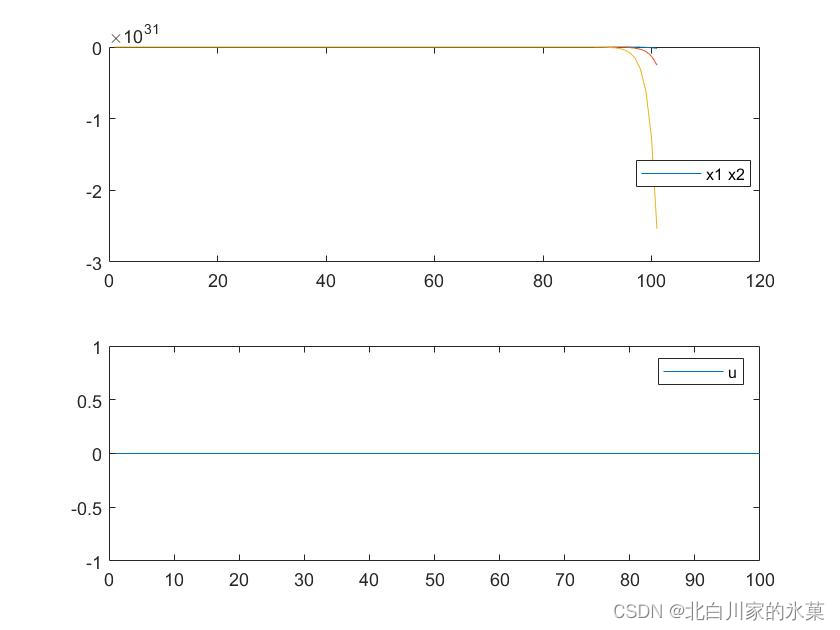
对于单输入系统,加入MPC后,结果如下:
可见加入MPC控制后,系统收敛了,MPC的确起到了状态反馈的作用,使得新的闭环系统的极点处于单位圆内。
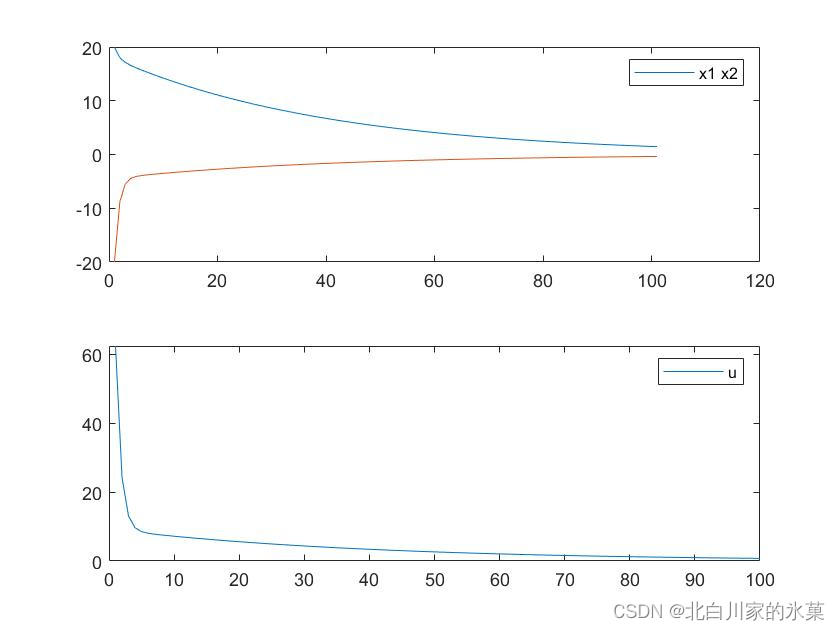
如果提高的权重,效果如下:
如果提高输入的权重,结果如下:
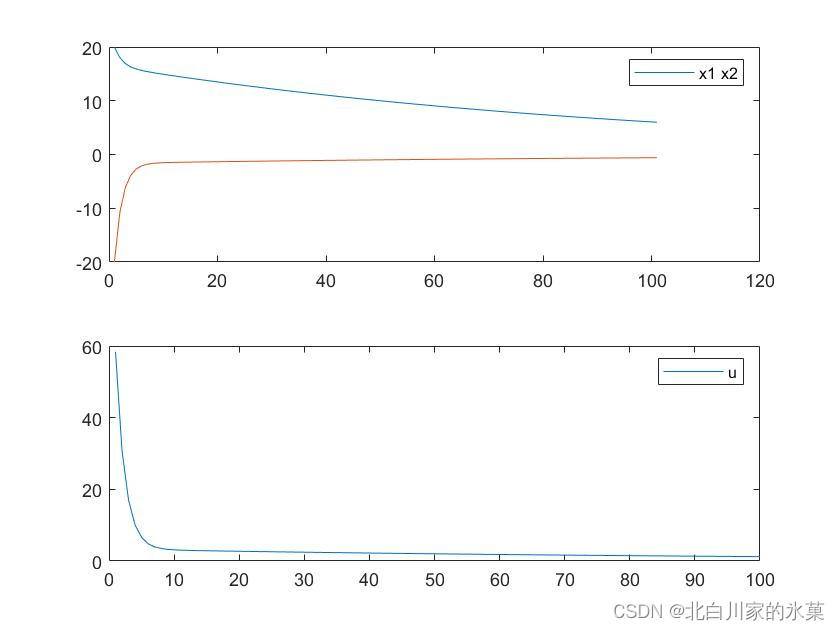
显然状态空间衰减变慢
如果期望值不是0,如期望终值为70,结果如下:
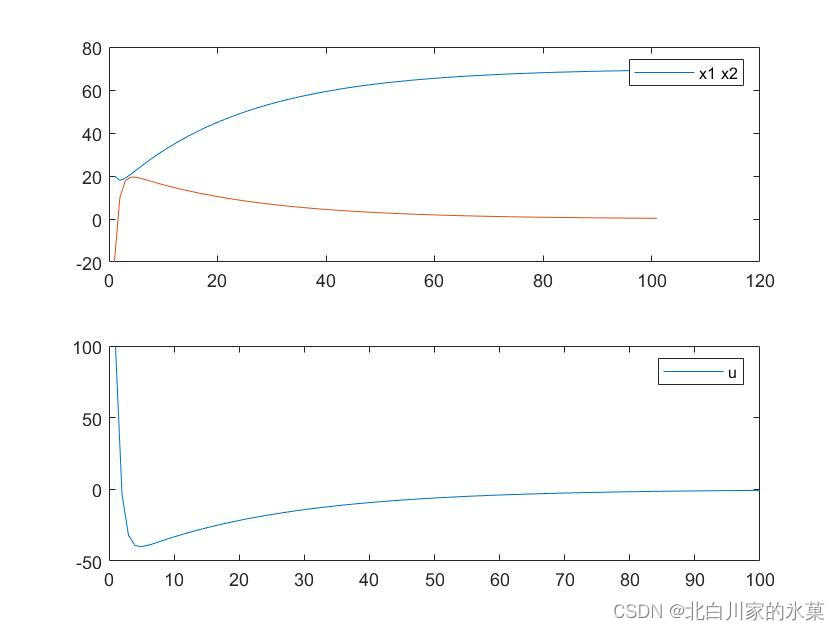
改变目标值的本质原理如下:
一般情况下,对于状态空间 ,如果A的特征值在单位圆内(离散状态空间),那么该系统必能收敛至0
设期望值为,那么偏差值:
两边取微分:
因此偏差也可以衰减至0,且和原状态空间的A矩阵相同,因此可以套用原状态空间的控制方法
下图来自现代控制理论
综上,SISO系统MPC控制代码如下:
mpc_sim.m
clear;
clc;
A=[1 0.1;0 2];
B=[0;0.5];
%x=Ax0+Bu
Q=[2 0;0 1];%weight of error cost function
F=[1 0;0 1];%weight of error cost function(last step)
R=[0.1]; %weight of input cost function
n=size(A,1);%the dimension of the state space
p=size(B,2);%the dimension of input vector
k_step=100;%steps of my state space
X_k=zeros(n,k_step);%set state space vector
X_d=zeros(n,k_step);
X_k(:,1)=[20;-20];%initialization of the state space
U_k=zeros(p,k_step);%set input vector
N=5; %prediction horizon
basic = eye(n);
[E,H]=Cal_matrix(A,B,Q,R,F,N);
X_expect=[70;0];
for k = 1:k_step
X_d(:,k)=X_k(:,k)-X_expect;
U_k(:,k)=Prediction(X_d(:,k),E,H,N,p);%with k adding,the initial value of
%X_k also changes,so this is what is called recursive optimization
X_d(:,k+1)=A*X_d(:,k)+B*U_k(:,k);%recursion of state space
X_k(:,k+1)=X_d(:,k+1)+X_expect;
end
subplot(2,1,1);
for i= 1 :size(X_k,1)
plot(X_k(i,:));
hold on
end
legend("x1 x2");
hold on;
subplot(2,1,2);
for i =1:size(U_k,1)
plot (U_k(i,:));
end
legend("u");
Cal_matrix.m
function [E,H]=Cal_matrix(A,B,Q,R,F,N)
n=size(A,1);
p=size(B,2);
M=[eye(n);zeros(N*n,n)];
C=zeros((N+1)*n,N*p);
temp=eye(n);
for i = 1:N
rows=i*n+(1:n); %this mean from which lines should we start at this step,
%for each matrix has not a single row,we use 'i*n',it starts from n+1
C(rows,:)=[temp*B,C(rows-n,1:end-p)]%"rows-n,1:end-p"means using the
%elements of last step,end -p equals to let out a place for 'temp*B'
temp=A*temp;
M(rows,:)=temp;
end
Q_bar=kron(eye(N),Q);%in order to make a diagonal matrix with Q
% as its diagonal elements
Q_bar=blkdiag(Q_bar,F);
R_bar=kron(eye(N),R);
G=M'*Q_bar*M;
E=C'*Q_bar*M;
H=C'*Q_bar*C+R_bar;
end
prediction.m
function u_k=Prediction(x_k,E,H,N,p)
U_k=zeros(N*p,1);
U_k=quadprog(H,E*x_k);
u_k=U_k(1:p,1);%only use the first step
end另外,令该系统跟踪圆形轨迹,结果如下:
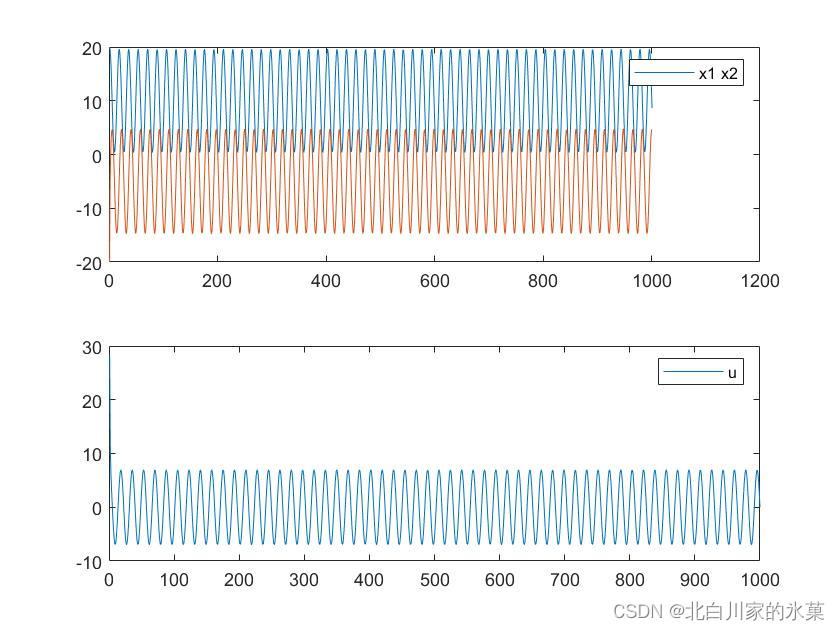
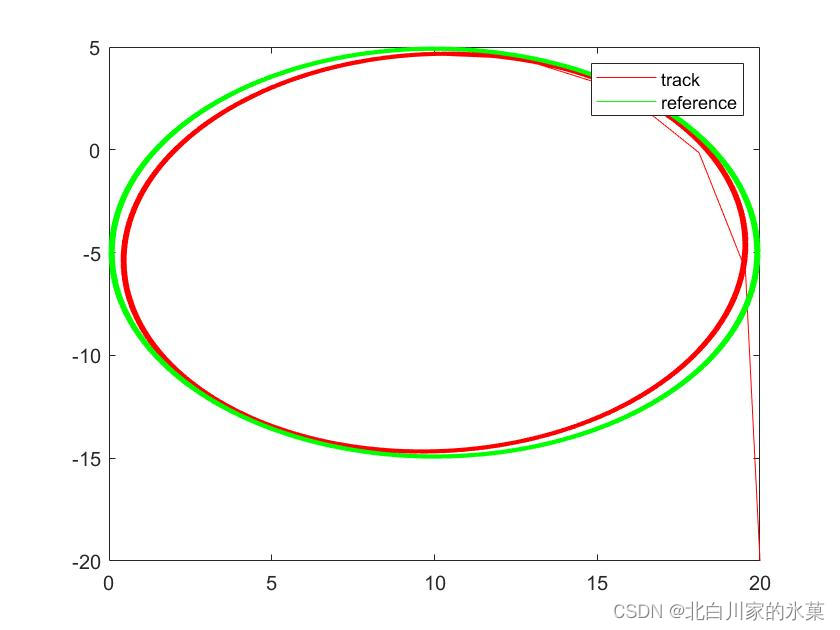
主函数对应如下:
clear;
clc;
A=[0.3 0;0 1];
B=[0;0.5];
%x=Ax0+Bu
Q=[1 0;0 1];%weight of error cost function
F=[1 0;0 1];%weight of error cost function(last step)
R=[0.1]; %weight of input cost function
n=size(A,1);%the dimension of the state space
p=size(B,2);%the dimension of input vector
k_step=1000;%steps of my state space
X_k=zeros(n,k_step);%set state space vector
X_d=zeros(n,k_step);
X_k(:,1)=[20;-20];%initialization of the state space
U_k=zeros(p,k_step);%set input vector
N=5; %prediction horizon
basic = eye(n);
[E,H]=Cal_matrix(A,B,Q,R,F,N);
X_expect=zeros(n,k_step);
for k = 1:k_step
X_expect=[10*cos(360/k_step*k)+10;10*sin(360/k_step*k)-5];
X_d(:,k)=X_k(:,k)-X_expect;
U_k(:,k)=Prediction(X_d(:,k),E,H,N,p);%with k adding,the initial value of
%X_k also changes,so this is what is called recursive optimization
X_d(:,k+1)=A*X_d(:,k)+B*U_k(:,k);%recursion of state space
X_k(:,k+1)=X_d(:,k+1)+X_expect;
end
figure(1)
subplot(2,1,1);
for i= 1 :size(X_k,1)
plot(X_k(i,:));
hold on
end
legend("x1 x2");
hold on;
subplot(2,1,2);
for i =1:size(U_k,1)
plot (U_k(i,:));
end
legend("u");
hold on;
figure(2);
plot(X_k(1,:),X_k(2,:),'r')
hold on;
X_exp_vec=zeros(n,k_step);
for k = 1:k_step
X_exp_vec(:,k)=[10*cos(360/k_step*k)+10;10*sin(360/k_step*k)-5];
end
plot(X_exp_vec(1,:),X_exp_vec(2,:),'g')
legend("track","reference");
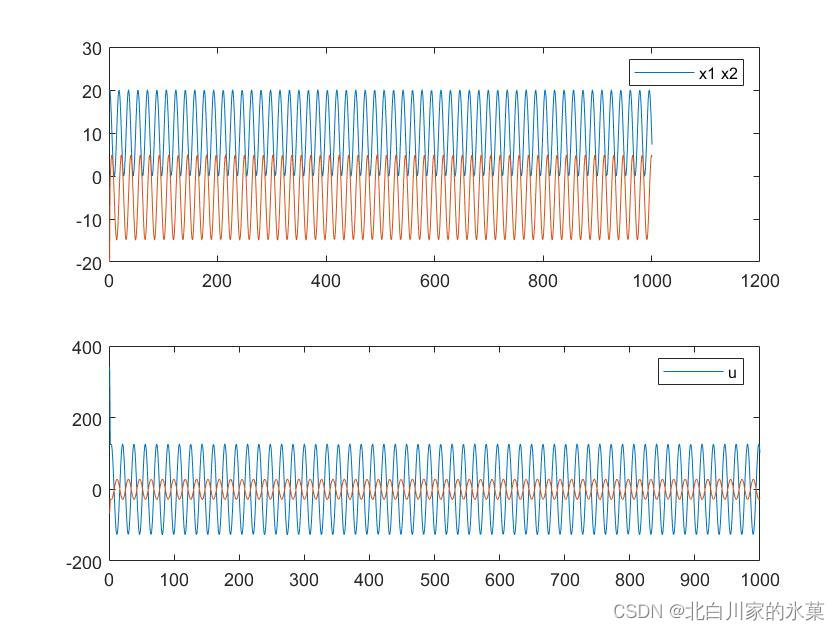
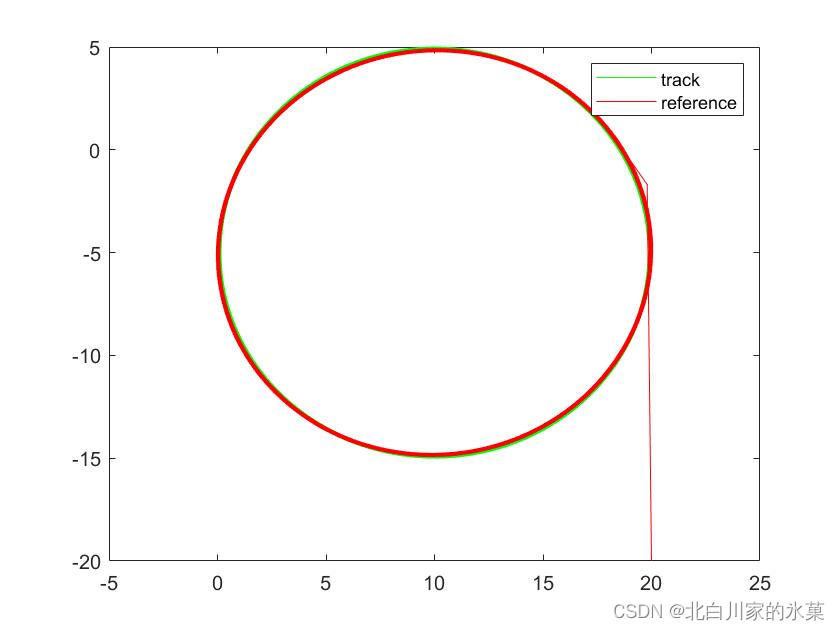
对于MIMO系统:
仿真代码如下:
clear;
clc;
A=[1 0.1;-1 2];
B=[0.2 1;0.5 2];
%x=Ax0+Bu
Q=[1500 0;0 1500];%weight of error cost function
F=[1 0;0 1];%weight of error cost function(last step)
R=[0.1 0;0 0.1]; %weight of input cost function
lb=[-200;-200];
ub=[200;200];
MIN=[-20;-20;-20;-20;-20;-20;-20;-20;-20;-20;-20;-20];
MAX=[20;20;20;20;20;20;20;20;20;20;20;20];
n=size(A,1);%the dimension of the state space
p=size(B,2);%the dimension of input vector
k_step=1000;%steps of my state space
X_k=zeros(n,k_step);%set state space vector
X_d=zeros(n,k_step);
X_k(:,1)=[20;-20];%initialization of the state space
U_k=zeros(p,k_step);%set input vector
N=5; %prediction horizon
basic = eye(n);
[E,H,M,C]=Cal_matrix(A,B,Q,R,F,N);
A_k=[C;-C];
b_k=[MAX-M*X_k(:,1);-MIN+M*X_k(:,1)];
X_expect=zeros(n,k_step);
for k = 1:k_step
X_expect=[10*cos(360/k_step*k)+10;10*sin(360/k_step*k)-5];
X_d(:,k)=X_k(:,k)-X_expect;
U_k(:,k)=Prediction(X_d(:,k),E,H,N,p,A_k,b_k,lb,ub);%with k adding,the initial value of
%X_k also changes,so this is what is called recursive optimization
X_d(:,k+1)=A*X_d(:,k)+B*U_k(:,k);%recursion of state space
X_k(:,k+1)=X_d(:,k+1)+X_expect;
end
figure(1)
subplot(2,1,1);
for i= 1 :size(X_k,1)
plot(X_k(i,:));
hold on
end
legend("x1 x2");
hold on;
subplot(2,1,2);
for i =1:size(U_k,1)
plot (U_k(i,:));
hold on
end
legend("u");
hold on;
figure(2);
X_exp_vec=zeros(n,k_step);
for k = 1:k_step
X_exp_vec(:,k)=[10*cos(360/k_step*k)+10;10*sin(360/k_step*k)-5];
end
plot(X_exp_vec(1,:),X_exp_vec(2,:),'g')
hold on;
plot(X_k(1,:),X_k(2,:),'r')
legend("track","reference");
该代码在原基础上加入了约束条件,如果代码运行不了可以将约束去掉,仿真结果如下,其中
权重提高可以提高跟踪的效果
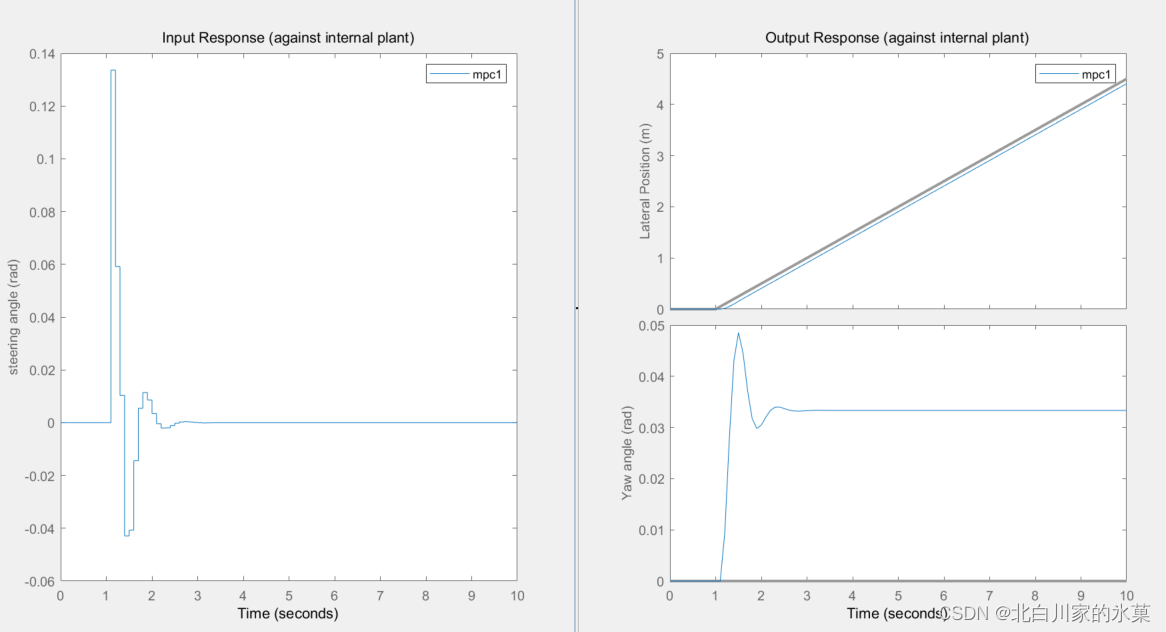
在simulink中使用mpc controler搭建框图如下:
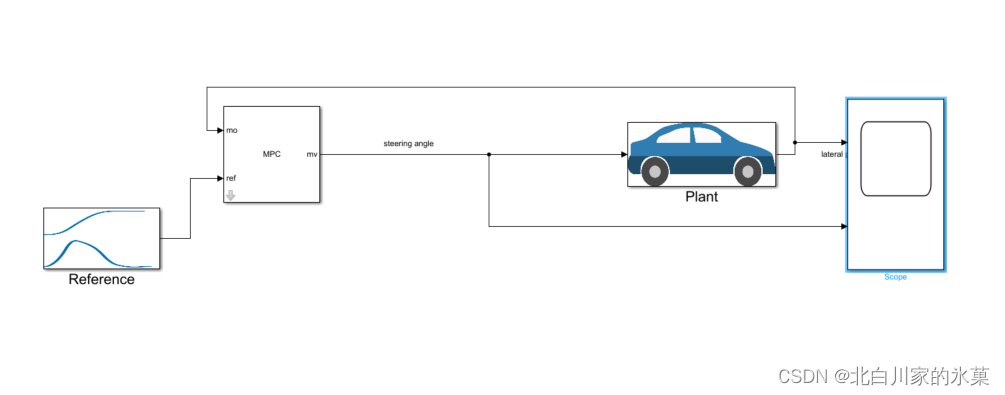
搭建教程: 【Model Predictive Control】了解模型预测控制,第六部分:如何使用 Simulink 和模型预测控制工具箱设计 MPC 控制器_哔哩哔哩_bilibili
给定约束:
① 方向盘物理转角不得超过30°
② 为了保证舒适度,方向盘变化率不得超过15°/s
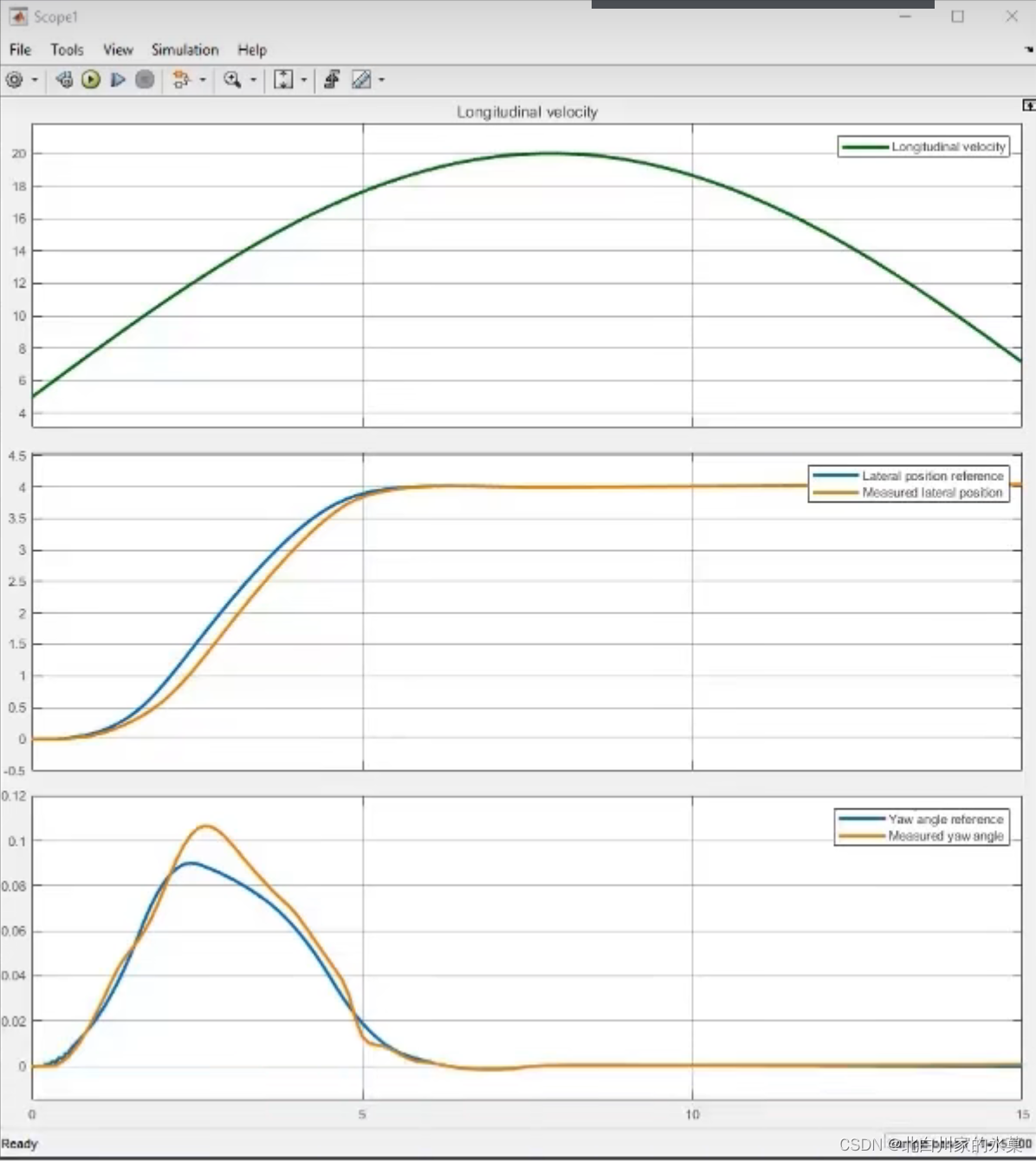
在此条件下,仿真结果如图:
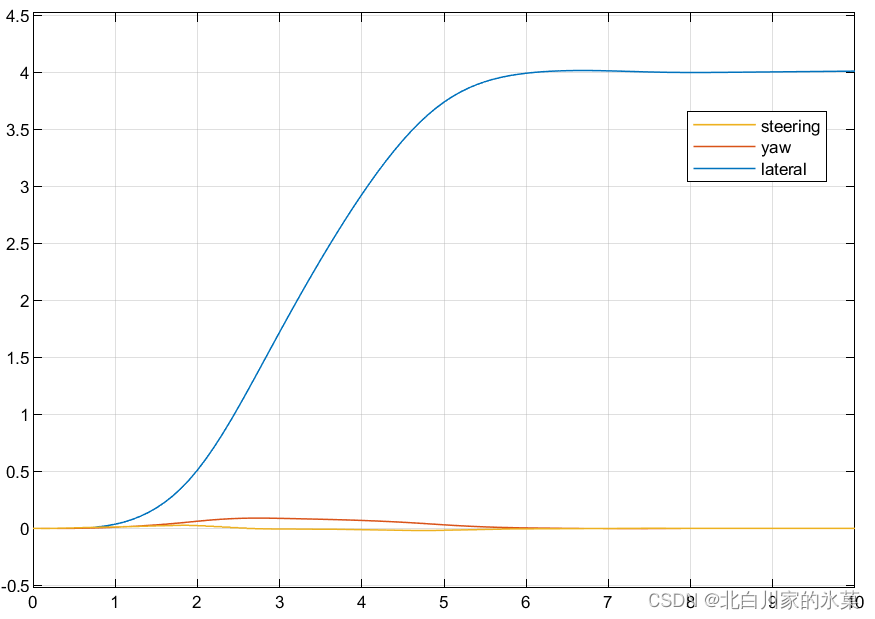
在预测范围为10,控制范围为2时,结果如下:
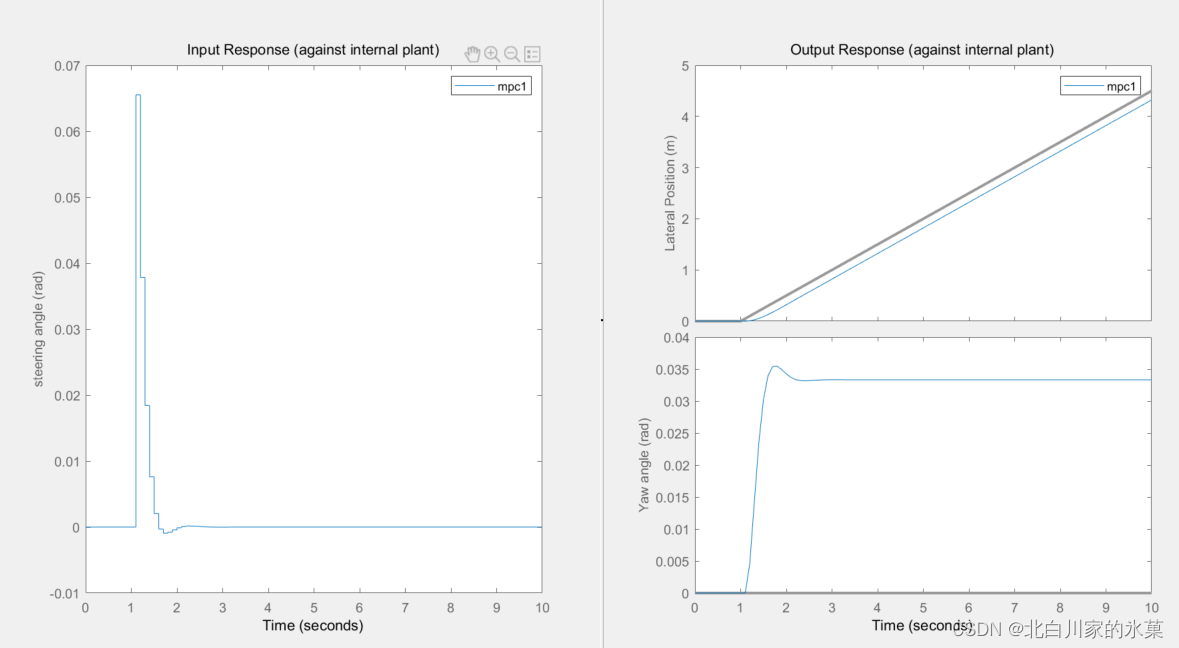
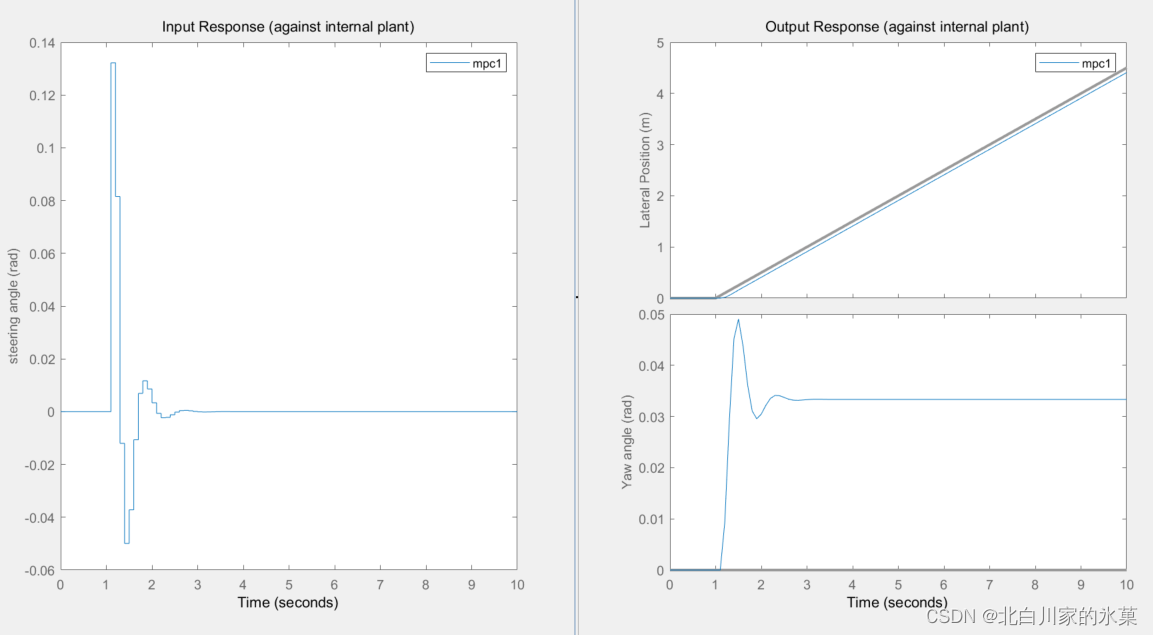
如果将prediction horizon变大,结果如下:
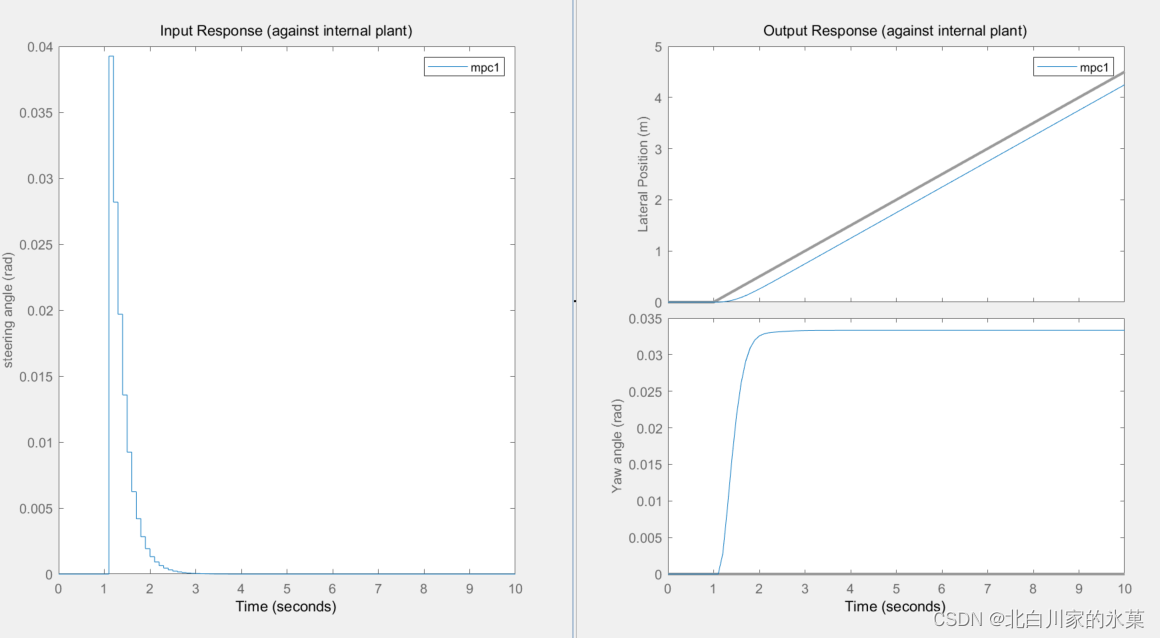
超调此时减小了,但是预测范围太大可能会造成算力的浪费
将控制范围变大,可见跟踪效果更好,跟踪曲线更接近reference
然而,进一步提高控制范围,发现结果变化并不大,所以我们一般取预测范围的20%-30%就可以了
当速度提升至35时,结果如下:
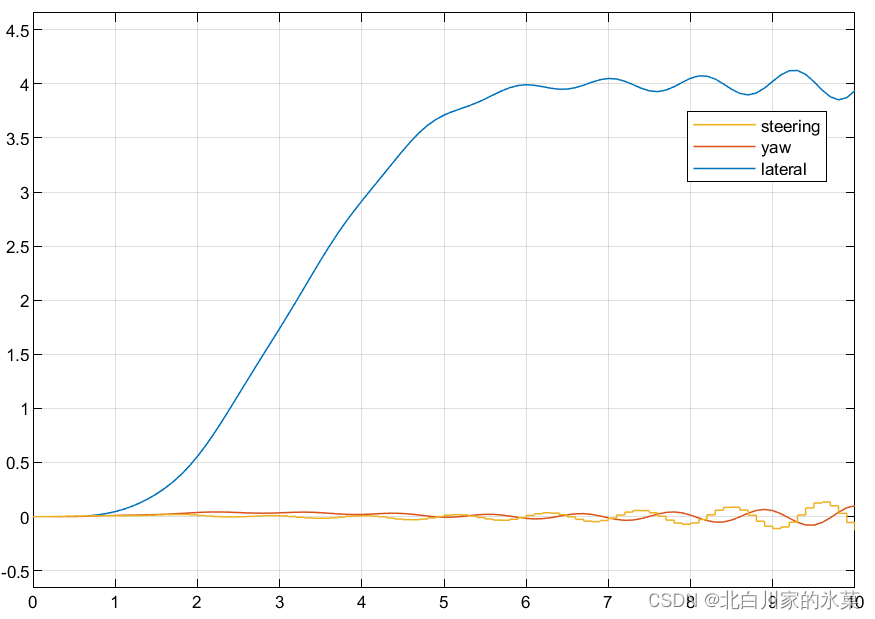
可见跟踪效果并不好,所以我们最好添加自适应MPC(adaptive MPC)
这里就必须要提及著名的自行车模型
自行车模型的条件如下:
① 车辆做平面运动
② 左右前轮的转向角近似相等
③ 忽略轮胎收到的侧向力
④ 忽略前后轴荷载的转移
⑤ 车身和悬架系统是刚性的
其中② ③限制了车体必须是低速运动的
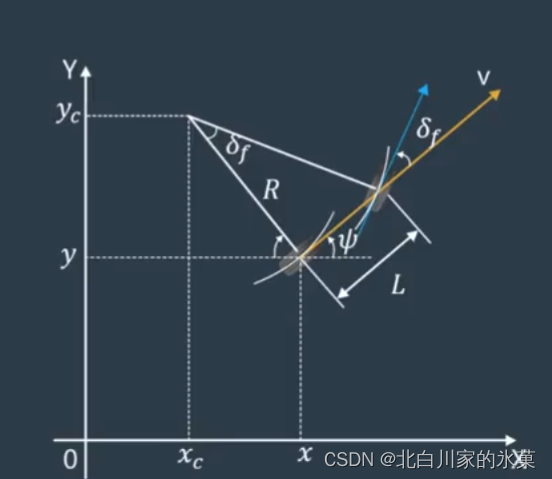
我们选择状态变量:
x,y:车辆在绝对坐标系的位置
v:车辆的速度大小
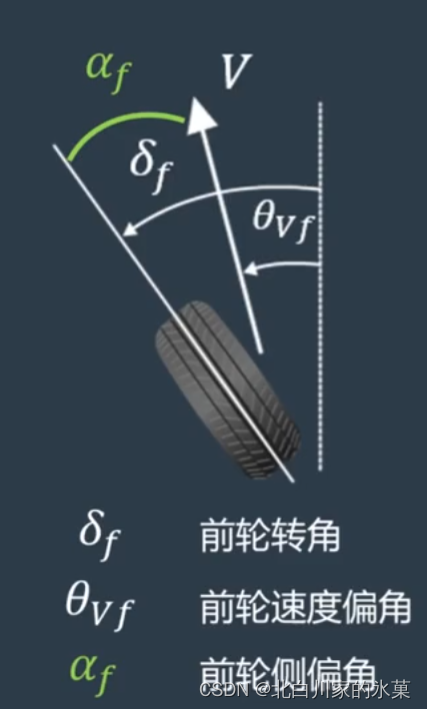
: 车辆的转角大小
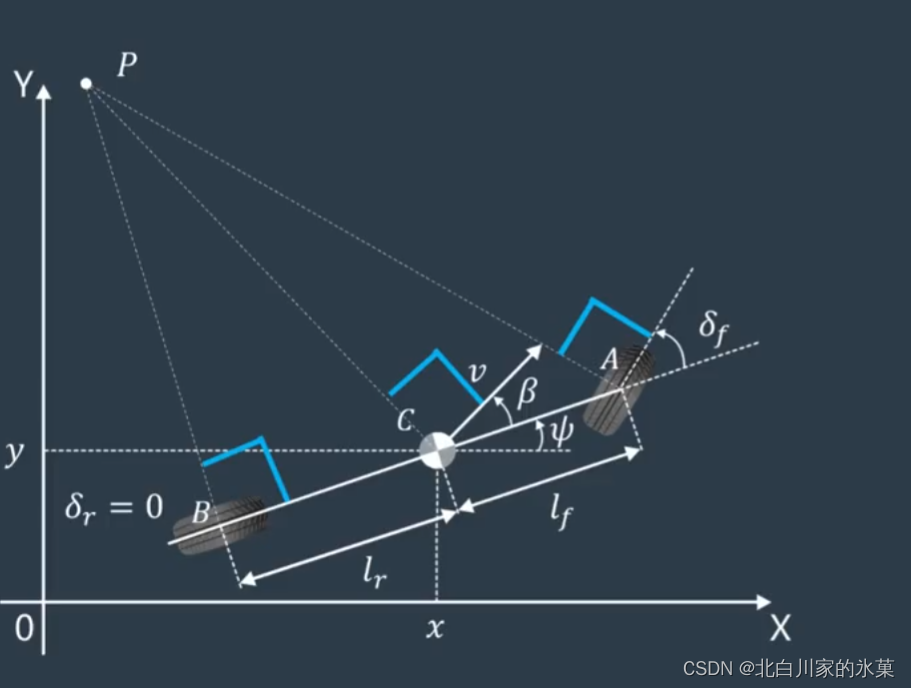
假如这是一辆车,则有:
:前轮与车辆纵轴之间的夹角
:后轮与车辆纵轴之间的夹角(如果后轮不能转就是0)
:质心侧偏角,即车辆速度与纵轴之间的偏角,低速行驶时认为特别小
A B为前后轮的速度质心,C为车体整体质心,下面以C为原点推导自行车模型,当然,我们可以以A,B为原点推导,过程相似,结果略有差异
设PC=R
则有:
整理得:
联立以上两式,同时在低速时,我们假设R变化缓慢,那么:
与以上两式联立,得:
在质心处:
此时反解:
在高速情况下,外力对于车辆的影响是比较大的,所以我们不光要考虑运动学模型,更要考虑动力学模型
在低速时,我们通常认为轮胎的朝向就是车的运动方向,但是在高速行驶时并不是这样,因为轮胎存在侧偏特性,即车轮的速度方向并不是轮胎的朝向
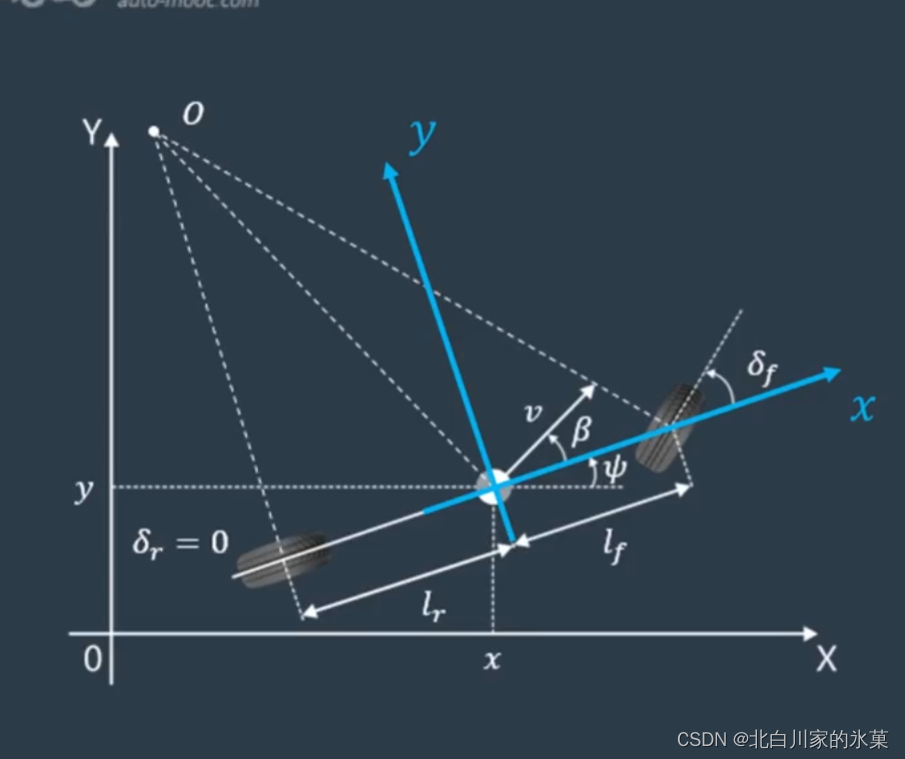
对于横向动力学模型,有以下假设:
① 忽略悬架运动、道路倾斜度、空气动力学等非线性效应
② 忽略轮胎力的纵横向耦合关系
以车体质心为原点,车体纵轴为x轴建立坐标系如下:
对于侧向,有:
而侧向加速度包括运动加速度和向心加速度
代入:
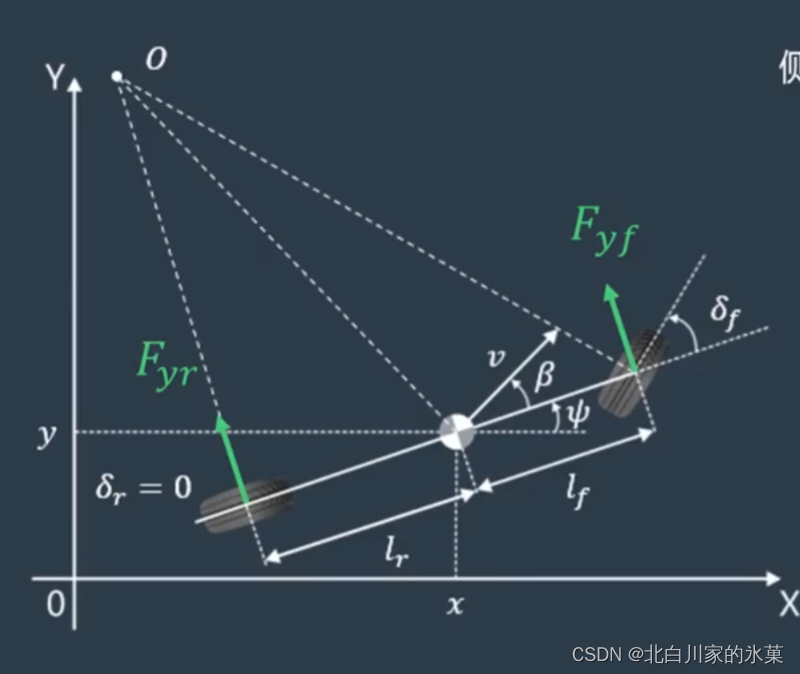
对于横摆运动(即绕z轴的转动):
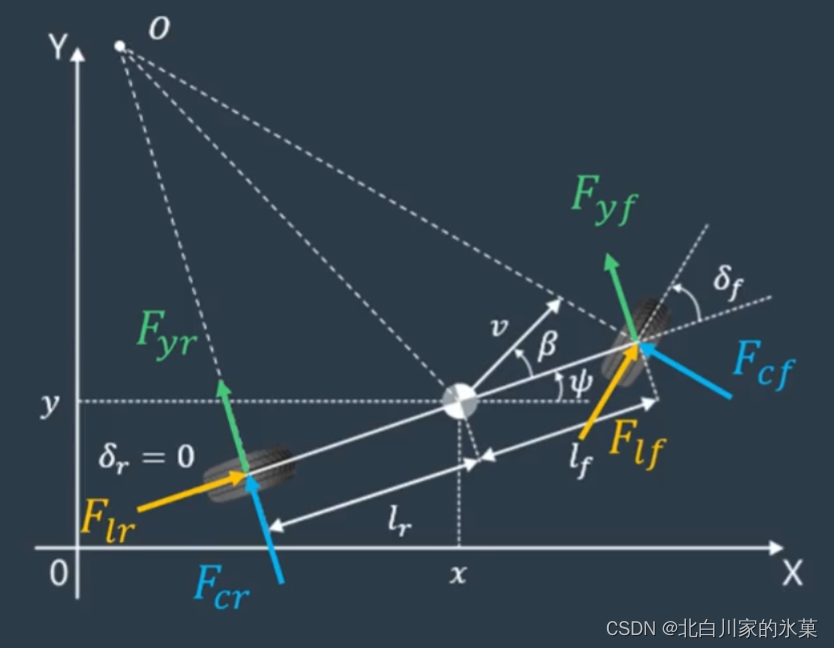
对车轮进行受力分析,车轮受侧向力(风吹,提供离心力的摩擦)和纵向力(摩擦,牵引),二者可以合成为车体的横向力
很小,所以可以忽略
侧偏力和侧偏角关系如图:
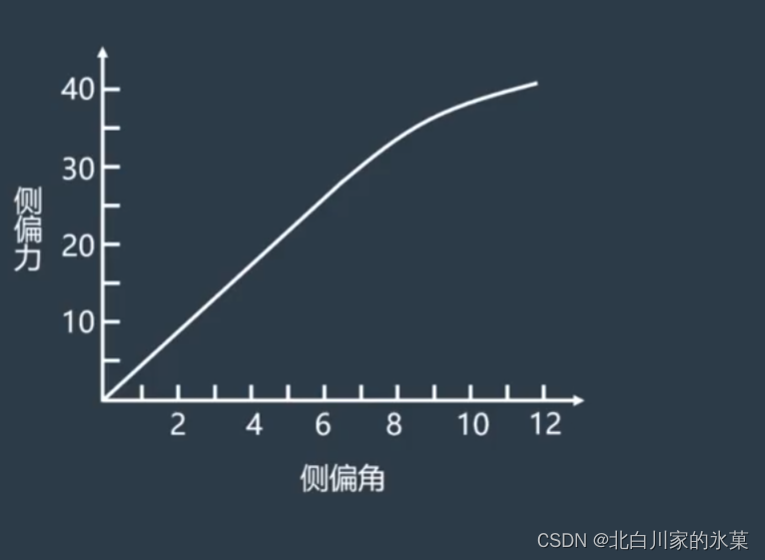
在侧偏角较小时,可以认为:
其中C为侧偏刚度
因此:
对前后轮进行速度分解,得:
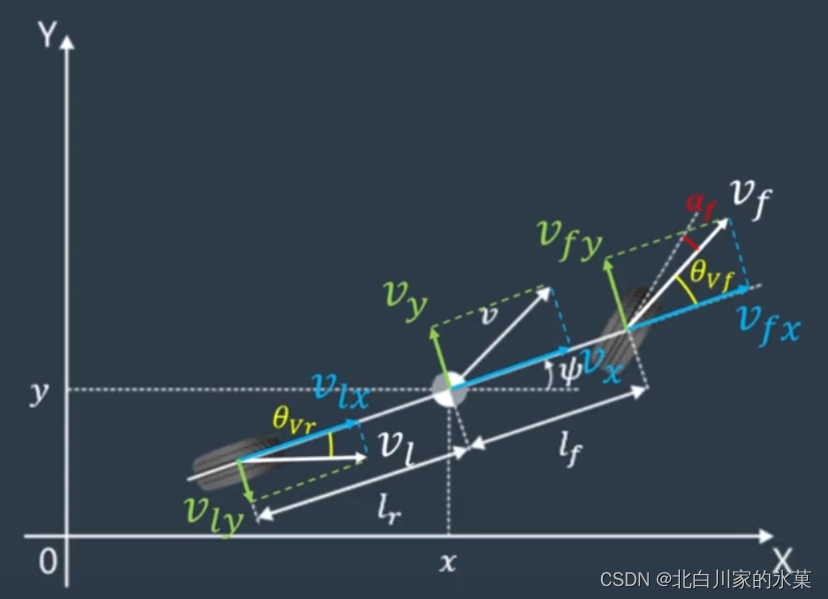
代入侧向力表达式:
代入横向动力学方程,并整理成矩阵形式
令:
为状态向量
为控制量
为已知参数
得:
可见,车体的横向运动模型和车的是有关系的
自适应MPC可以在运行的每一步提供一个新的,合适的线性模型,确保在新的运行条件下做出更准确的预测
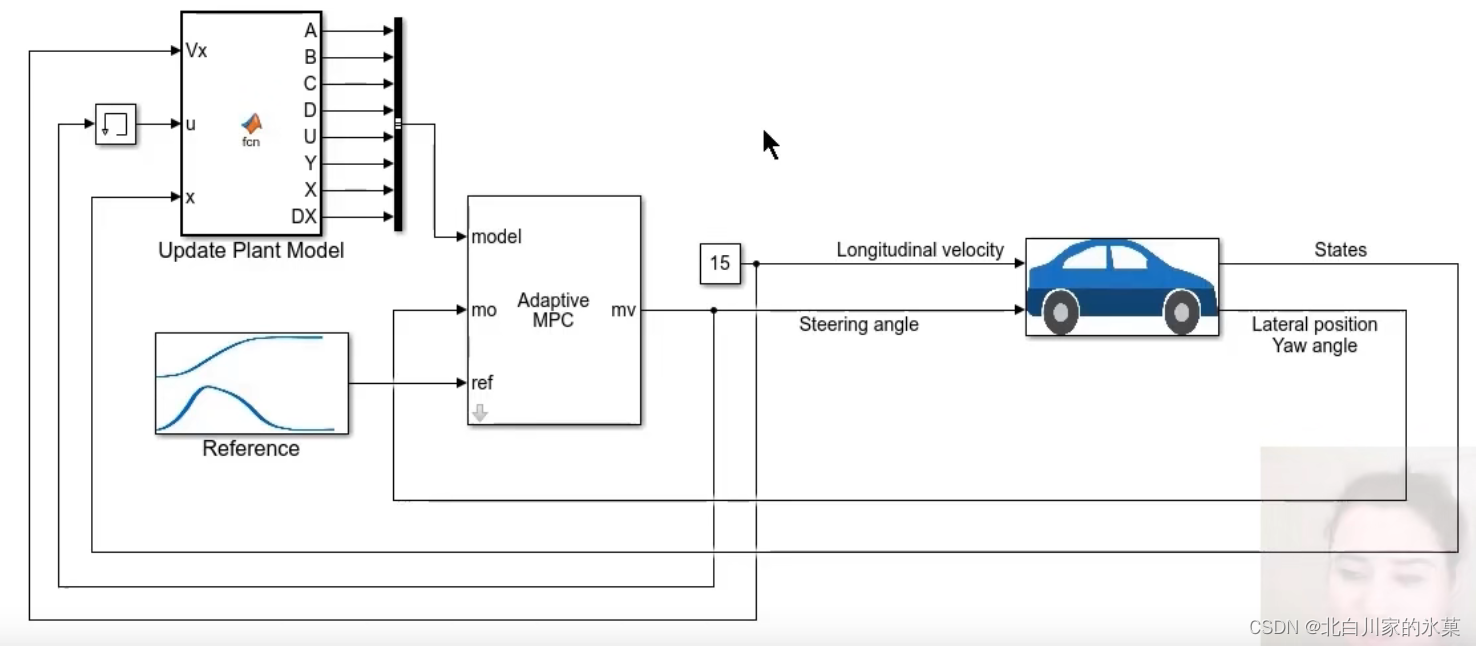
这个我没做出来,因为属实不知道怎么改这个plant,所以直接截图了
更改的值,甚至可以将其改为正弦信号,结果如下:
可见MPC的确可以根据不同的模型,不同的条件进行自适应控制
参考文献:
[PDF] MPC-Based Approach to Active Steering for Autonomous Vehicle Systems | Semantic Scholar
面对非线性模型,我们一般有两个思路:
一个是直接采用非线性模型,对原来模型直接进行控制
另一个是对模型进行连续的在线线性化
参考文献
显式预测控制(Explicit MPC)_dymodi的博客-CSDN博客_显式模型预测控制
目录一.加解密算法数字签名对称加密DES(DataEncryptionStandard)3DES(TripleDES)AES(AdvancedEncryptionStandard)RSA加密法DSA(DigitalSignatureAlgorithm)ECC(EllipticCurvesCryptography)非对称加密签名与加密过程非对称加密的应用对称加密与非对称加密的结合二.数字证书图解一.加解密算法加密简单而言就是通过一种算法将明文信息转换成密文信息,信息的的接收方能够通过密钥对密文信息进行解密获得明文信息的过程。根据加解密的密钥是否相同,算法可以分为对称加密、非对称加密、对称加密和非
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称
最近在学习CAN,记录一下,也供大家参考交流。推荐几个我觉得很好的CAN学习,本文也是在看了他们的好文之后做的笔记首先是瑞萨的CAN入门,真的通透;秀!靠这篇我竟然2天理解了CAN协议!实战STM32F4CAN!原文链接:https://blog.csdn.net/XiaoXiaoPengBo/article/details/116206252CAN详解(小白教程)原文链接:https://blog.csdn.net/xwwwj/article/details/105372234一篇易懂的CAN通讯协议指南1一篇易懂的CAN通讯协议指南1-知乎(zhihu.com)视频推荐CAN总线个人知识总
深度学习部署:Windows安装pycocotools报错解决方法1.pycocotools库的简介2.pycocotools安装的坑3.解决办法更多Ai资讯:公主号AiCharm本系列是作者在跑一些深度学习实例时,遇到的各种各样的问题及解决办法,希望能够帮助到大家。ERROR:Commanderroredoutwithexitstatus1:'D:\Anaconda3\python.exe'-u-c'importsys,setuptools,tokenize;sys.argv[0]='"'"'C:\\Users\\46653\\AppData\\Local\\Temp\\pip-instal
我完全不是程序员,正在学习使用Ruby和Rails框架进行编程。我目前正在使用Ruby1.8.7和Rails3.0.3,但我想知道我是否应该升级到Ruby1.9,因为我真的没有任何升级的“遗留”成本。缺点是什么?我是否会遇到与普通gem的兼容性问题,或者甚至其他我不太了解甚至无法预料的问题? 最佳答案 你应该升级。不要坚持从1.8.7开始。如果您发现不支持1.9.2的gem,请避免使用它们(因为它们很可能不被维护)。如果您对gem是否兼容1.9.2有任何疑问,您可以在以下位置查看:http://www.railsplugins.or
如何学习ruby的正则表达式?(对于假人) 最佳答案 http://www.rubular.com/在Ruby中使用正则表达式时是一个很棒的工具,因为它可以立即将结果可视化。 关于ruby-我如何学习ruby的正则表达式?,我们在StackOverflow上找到一个类似的问题: https://stackoverflow.com/questions/1881231/
深度学习12.CNN经典网络VGG16一、简介1.VGG来源2.VGG分类3.不同模型的参数数量4.3x3卷积核的好处5.关于学习率调度6.批归一化二、VGG16层分析1.层划分2.参数展开过程图解3.参数传递示例4.VGG16各层参数数量三、代码分析1.VGG16模型定义2.训练3.测试一、简介1.VGG来源VGG(VisualGeometryGroup)是一个视觉几何组在2014年提出的深度卷积神经网络架构。VGG在2014年ImageNet图像分类竞赛亚军,定位竞赛冠军;VGG网络采用连续的小卷积核(3x3)和池化层构建深度神经网络,网络深度可以达到16层或19层,其中VGG16和VGG
文章目录1、自相关函数ACF2、偏自相关函数PACF3、ARIMA(p,d,q)的阶数判断4、代码实现1、引入所需依赖2、数据读取与处理3、一阶差分与绘图4、ACF5、PACF1、自相关函数ACF自相关函数反映了同一序列在不同时序的取值之间的相关性。公式:ACF(k)=ρk=Cov(yt,yt−k)Var(yt)ACF(k)=\rho_{k}=\frac{Cov(y_{t},y_{t-k})}{Var(y_{t})}ACF(k)=ρk=Var(yt)Cov(yt,yt−k)其中分子用于求协方差矩阵,分母用于计算样本方差。求出的ACF值为[-1,1]。但对于一个平稳的AR模型,求出其滞
1.问题描述使用Python的turtle(海龟绘图)模块提供的函数绘制直线。2.问题分析一幅复杂的图形通常都可以由点、直线、三角形、矩形、平行四边形、圆、椭圆和圆弧等基本图形组成。其中的三角形、矩形、平行四边形又可以由直线组成,而直线又是由两个点确定的。我们使用Python的turtle模块所提供的函数来绘制直线。在使用之前我们先介绍一下turtle模块的相关知识点。turtle模块提供面向对象和面向过程两种形式的海龟绘图基本组件。面向对象的接口类如下:1)TurtleScreen类:定义图形窗口作为绘图海龟的运动场。它的构造器需要一个tkinter.Canvas或ScrolledCanva
写在之前Shader变体、Shader属性定义技巧、自定义材质面板,这三个知识点任何一个单拿出来都是一套知识体系,不能一概而论,本文章目的在于将学习和实际工作中遇见的问题进行总结,类似于网络笔记之用,方便后续回顾查看,如有以偏概全、不祥不尽之处,还望海涵。1、Shader变体先看一段代码......Properties{ [KeywordEnum(on,off)]USL_USE_COL("IsUseColorMixTex?",int)=0 [Toggle(IS_RED_ON)]_IsRed("IsRed?",int)=0}......//中间省略,后续会有完整代码 #pragmamulti_c