陈拓 2023/03/24-2023/03/29
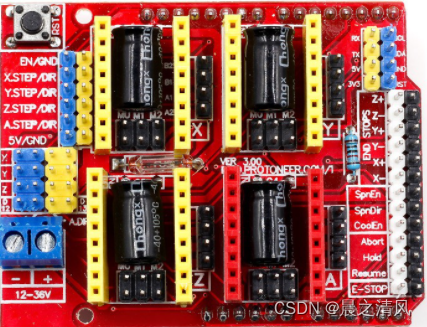
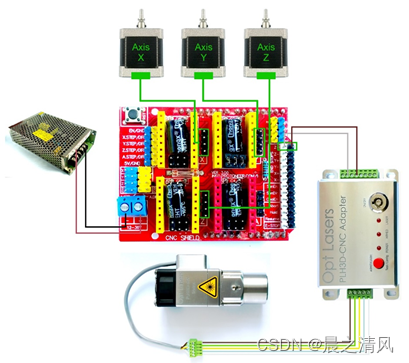
注意:板子左侧中间的玻璃管是玻封保险丝。
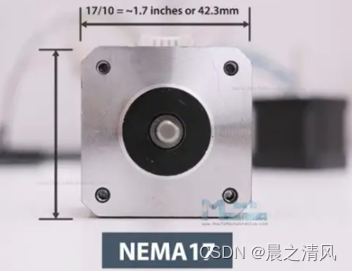
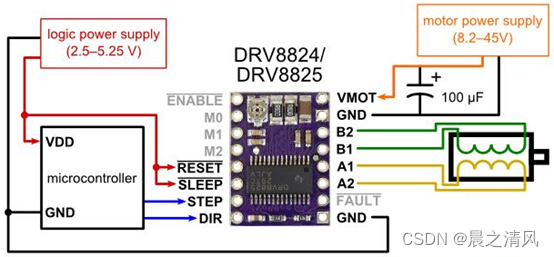
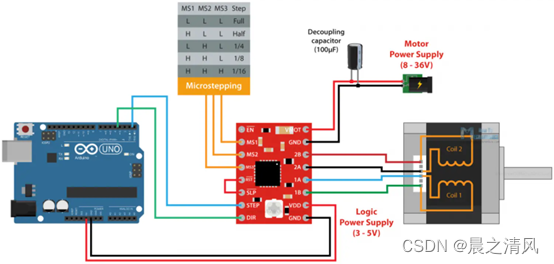
Arduino CNC Shield可以搭载A4988、DRV8825等步进电机驱动模块,用于驱动NEMA17电机(俗称42步进电机)。
2.1.1 引脚布局
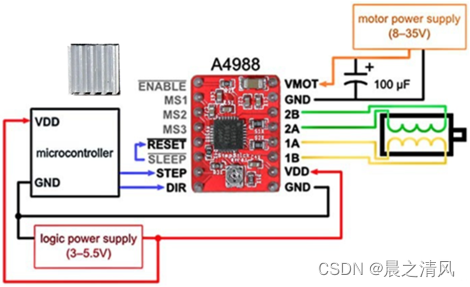
注意:模块使用时需加装散热器。
单片机只需要控制两个引脚DIR和STEP即可控制步进电机。
2.1.2 引脚功能说明
从左上角开始,逆时针方向。
| MS1 | MS2 | MS3 | 步进模式 |
| L | L | L | 全步进模式 |
| H | L | L | 半步进模式 |
| L | H | L | 1/4步进模式 |
| H | H | L | 1/8步进模式 |
| H | H | H | 1/16步进模式 |
L:低电平,H:高电平
步进模式:NEMA17电机默认200步转一圈,也就是360度,那么每一步电机转动的角度就是360/200=1.8度。如果要设置半步进模式,输入HLL电平给MS1、MS2、MS3三个引脚,这样电机就进入1/2步进模式,也就是每步旋转的角度减半,即电机每转动一步只行进0.9度;用以更高的精度来控制行程。
2.1.3 A4988的电路原理图
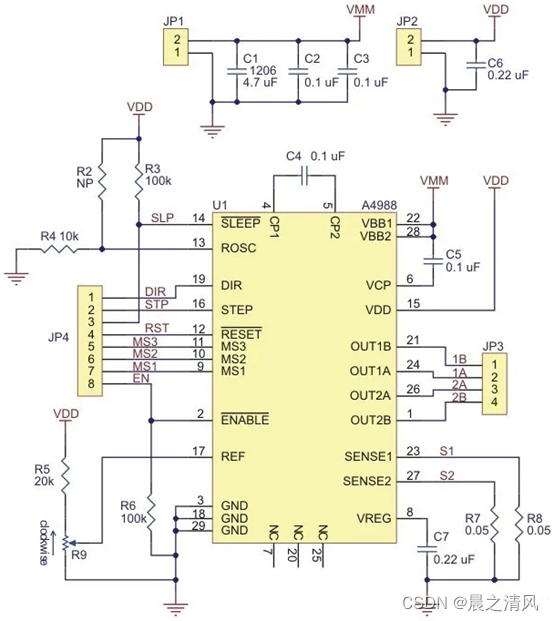
2.1.4 输出电流(参考电压)调整
通过4988驱动板上的电位器对参考电压(引脚REF)进行调整,从而调节输出电流。
最大输出电流计算公式:
Imax = Vref / ( 8 * Rs)
Vref = Imax * Rs * 8
Vref越大,电流越大,驱动能力越强。
Vref是引脚REF上的参考电压,Rs是引脚SENSE1和SENSE2上接的感应电阻。
Rs在4988驱动板上是两个贴片电阻,市面上常见的A4988模块多用R100电阻,即0.1欧姆。
Imax是步进电机允许的最大电流。例如:如果我们使用的NEMA17电机允许的最大电流是1.5A,Vref = 1.5 * 0.1 * 8 = 1.2V。
实际操作时可以测量电位器中心抽头(也就是可以转动的部分)与地之间的电压。
使用万用表在所示点测量Vref(参考电压)

参考电压用小螺丝刀在图片中白色箭头所示的位置进行调整。建议以小的增量调整参考电压,每次不超过四分之一圈。开始时,可以将最大电流设置为1A。如果电机过热,则降低Vref。如果电机没有移动或未步进,则增加Vref。
测试时,将步进电机连接到要测试的步进控制器插座。这一点非常重要,因为步进电机驱动器的设计目的是增加电流,直到达到运行所需的电流。如果没有连接步进电机,就不会消耗电流,步进驱动器在这个过程中会发热,可能会损坏它。
2.2.1 引脚布局
与A4988基本相同。不同之处:
| M0 | M1 | M2 | 步进模式 |
| L | L | L | 全步进模式 |
| H | L | L | 半步进模式 |
| L | H | L | 1/4步进模式 |
| H | H | L | 1/8步进模式 |
| L | L | H | 1/16步进模式 |
| H | L | H | 1/32步进模式 |
| L | H | H | 1/32步进模式 |
| H | H | H | 1/32步进模式 |
FAULT用于过电流保护或热关断,输出低电平有效。
DRV8825仅具有VMOT一个电源连接。逻辑控制电路电源从DRV8825内部的3V3稳压器获取。因此在调节最大输出电流时要接上VMOT。
2.2.2 输出电流调节
最大输出电流计算公式:
Imax = 2 * Vref
例如,我们需要1.4A的步进电流,参考电压就调整到0.7V。

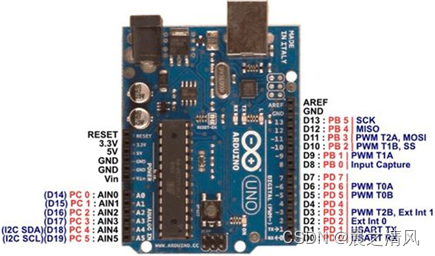
Arduino Uno的引脚分4组,分别是电源;PB、PC和PD,编号D0~D19。
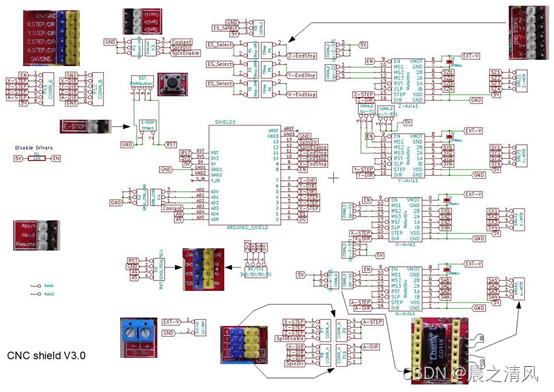
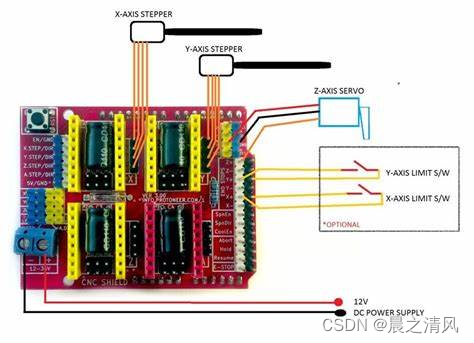
4.2.1 步进电机驱动模块控制引脚P11、P12

EN通过一个10电阻上拉到5V,并连接Arduino Uno的D8引脚,同时连接与X、Y、Z、A四个驱动模块的EN端。
X-STEP、Y-STEP、Z-STEP、A-STEP分别接D2、D3、D4、D12,并与4个相对应模块的对应引脚相连接。
其中,A-STEP到D12的连接是通过下面第四轴配置的跳线实现的。
X-DIR、Y-DIR、Z-DIR、A-DIR分别接D5、D6、D7、D13,并与4个相对应模块的对应引脚相连接。
其中,A-DIR到D13的连接是通过下面第四轴配置的跳线实现的。
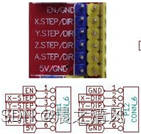
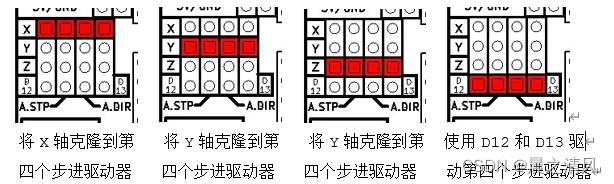
4.2.2 第四轴配置P7、P8、P9、P10
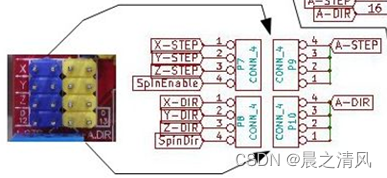
使用两个跳线,可以将第四个轴(标记为A)配置为克隆X、Y或Z轴,作为双电机轴。通过使用数字引脚12作为步进信号,使用数字引脚13作为方向信号,它也可以作为单独的轴运行。(GRBL目前只支持3个轴,需要自己编程控制)
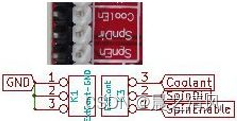
4.2.3 主轴控制K1、K3
4.2.4 为每个轴配置微步进
对于X轴,设置Jpr-X1和pr-X-5V,其他轴类似。


*在下表中,高表示已插入跳线帽,低表示未插入跳线帽。
Pololu A4988步进驱动器配置,5个可选的步进模式:
MS0 MS1 MS2 Microstep Resolution
Low Low Low Full step
High Low Low Half step
Low High Low 1/4 step
High High Low 1/8 step
High High High 1/16 step
Pololu DRV8825 步进驱动器配置,6个可选的步进模式:
MODE0 MODE1 MODE2 Microstep Resolution
Low Low Low Full step
High Low Low Half step
Low High Low 1/4 step
High High Low 1/8 step
Low Low High 1/16 step
High Low High 1/32 step
Low High High 1/32 step
High High High 1/32 step
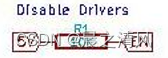
4.2.5 限位开关配置(End Stop Switches or Limit Switch)


X-并列X+标记为X-EndStop连接到D9。
Y-并列Y+标记为Y-EndStop连接到D10。
Z-并列Z+标记为Z-EndStop连接到D11。
ES_Select
常见的RAMPS限位开关有三根电线,易于使用、监测和安装。
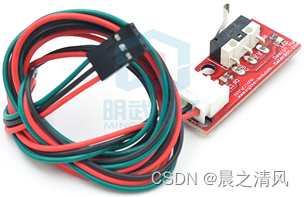
黑和绿之间为常开。
红和绿之间为常闭。红线接3.3V或5V,常闭开关断开时限位开关版上的LED指示灯点亮。
限位开关是标准的“常开”开关。当限位开关绿色引脚接地(黑色引脚)时,在使用默认GRBL设置的情况下,限位功能被激活。
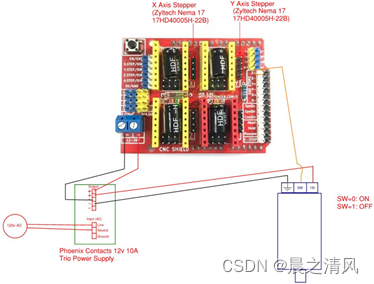
4.2.6 电机电源

外接电源EXT-V通过VMTO给电机供电。
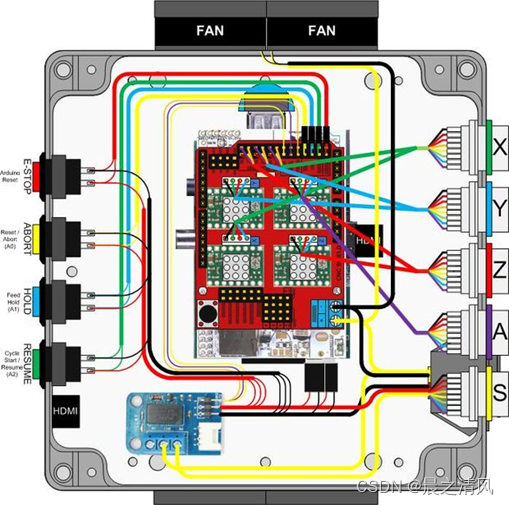
4.2.7 复位
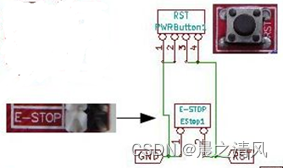
E-STOP相当于RST接Arduino Uno的RESET。
4.2.8 串口、I2C、复位和电源

RX、TX接D0、D1。
SDA、SCL接D18、D19。
4.2.9 其他操作

取消、保持、恢复分别接D14、D15、D6。
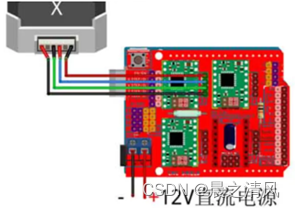
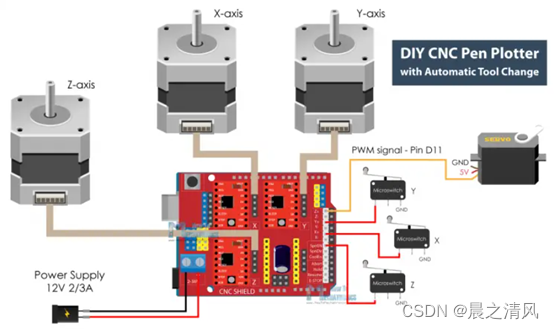
4.2.10 步进电机接线
步进电机接线很简单。将接头插入每个轴的插座上。如果电机转动方向不正确,只需将插头转动180度即可。
下面是X轴接线,其他轴类似。



我正在编写一个包含C扩展的gem。通常当我写一个gem时,我会遵循TDD的过程,我会写一个失败的规范,然后处理代码直到它通过,等等......在“ext/mygem/mygem.c”中我的C扩展和在gemspec的“扩展”中配置的有效extconf.rb,如何运行我的规范并仍然加载我的C扩展?当我更改C代码时,我需要采取哪些步骤来重新编译代码?这可能是个愚蠢的问题,但是从我的gem的开发源代码树中输入“bundleinstall”不会构建任何native扩展。当我手动运行rubyext/mygem/extconf.rb时,我确实得到了一个Makefile(在整个项目的根目录中),然后当
我已经在Sinatra上创建了应用程序,它代表了一个简单的API。我想在生产和开发上进行部署。我想在部署时选择,是开发还是生产,一些方法的逻辑应该改变,这取决于部署类型。是否有任何想法,如何完成以及解决此问题的一些示例。例子:我有代码get'/api/test'doreturn"Itisdev"end但是在部署到生产环境之后我想在运行/api/test之后看到ItisPROD如何实现? 最佳答案 根据SinatraDocumentation:EnvironmentscanbesetthroughtheRACK_ENVenvironm
我们的git存储库中目前有一个Gemfile。但是,有一个gem我只在我的环境中本地使用(我的团队不使用它)。为了使用它,我必须将它添加到我们的Gemfile中,但每次我checkout到我们的master/dev主分支时,由于与跟踪的gemfile冲突,我必须删除它。我想要的是类似Gemfile.local的东西,它将继承从Gemfile导入的gems,但也允许在那里导入新的gems以供使用只有我的机器。此文件将在.gitignore中被忽略。这可能吗? 最佳答案 设置BUNDLE_GEMFILE环境变量:BUNDLE_GEMFI
这似乎非常适得其反,因为太多的gem会在window上破裂。我一直在处理很多mysql和ruby-mysqlgem问题(gem本身发生段错误,一个名为UnixSocket的类显然在Windows机器上不能正常工作,等等)。我只是在浪费时间吗?我应该转向不同的脚本语言吗? 最佳答案 我在Windows上使用Ruby的经验很少,但是当我开始使用Ruby时,我是在Windows上,我的总体印象是它不是Windows原生系统。因此,在主要使用Windows多年之后,开始使用Ruby促使我切换回原来的系统Unix,这次是Linux。Rub
我正在玩HTML5视频并且在ERB中有以下片段:mp4视频从在我的开发环境中运行的服务器很好地流式传输到chrome。然而firefox显示带有海报图像的视频播放器,但带有一个大X。问题似乎是mongrel不确定ogv扩展的mime类型,并且只返回text/plain,如curl所示:$curl-Ihttp://0.0.0.0:3000/pr6.ogvHTTP/1.1200OKConnection:closeDate:Mon,19Apr201012:33:50GMTLast-Modified:Sun,18Apr201012:46:07GMTContent-Type:text/plain
我想这样组织C源代码:+/||___+ext||||___+native_extension||||___+lib||||||___(Sourcefilesarekeptinhere-maycontainsub-folders)||||___native_extension.c||___native_extension.h||___extconf.rb||___+lib||||___(Rubysourcecode)||___Rakefile我无法使此设置与mkmf一起正常工作。native_extension/lib中的文件(包含在native_extension.c中)将被完全忽略。
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visitthehelpcenter指导。关闭10年前。问题1)我想知道rubyonrails是否有功能类似于primefaces的gem。我问的原因是如果您使用primefaces(http://www.primefaces.org/showcase-labs/ui/home.jsf),开发人员无需担心javascript或jquery的东西。据我所知,JSF是一个规范,基于规范的各种可用实现,prim
无论您是想搭建桌面端、WEB端或者移动端APP应用,HOOPSPlatform组件都可以为您提供弹性的3D集成架构,同时,由工业领域3D技术专家组成的HOOPS技术团队也能为您提供技术支持服务。如果您的客户期望有一种在多个平台(桌面/WEB/APP,而且某些客户端是“瘦”客户端)快速、方便地将数据接入到3D应用系统的解决方案,并且当访问数据时,在各个平台上的性能和用户体验保持一致,HOOPSPlatform将帮助您完成。利用HOOPSPlatform,您可以开发在任何环境下的3D基础应用架构。HOOPSPlatform可以帮您打造3D创新型产品,HOOPSSDK包含的技术有:快速且准确的CAD
在应用开发中,有时候我们需要获取系统的设备信息,用于数据上报和行为分析。那在鸿蒙系统中,我们应该怎么去获取设备的系统信息呢,比如说获取手机的系统版本号、手机的制造商、手机型号等数据。1、获取方式这里分为两种情况,一种是设备信息的获取,一种是系统信息的获取。1.1、获取设备信息获取设备信息,鸿蒙的SDK包为我们提供了DeviceInfo类,通过该类的一些静态方法,可以获取设备信息,DeviceInfo类的包路径为:ohos.system.DeviceInfo.具体的方法如下:ModifierandTypeMethodDescriptionstatic StringgetAbiList()Obt
本教程将在Unity3D中混合Optitrack与数据手套的数据流,在人体运动的基础上,添加双手手指部分的运动。双手手背的角度仍由Optitrack提供,数据手套提供双手手指的角度。 01 客户端软件分别安装MotiveBody与MotionVenus并校准人体与数据手套。MotiveBodyMotionVenus数据手套使用、校准流程参照:https://gitee.com/foheart_1/foheart-h1-data-summary.git02 数据转发打开MotiveBody软件的Streaming,开始向Unity3D广播数据;MotionVenus中设置->选项选择Unit