目录
本节内容我们要介绍的是输入捕获,其实也和定时器那部分知识是有关系的,所谓输入捕获,通俗一点来讲,其实就是通过检测上升沿和下降沿来计算你的输入持续时间。具体怎么去检测和捕获呢?我们来慢慢介绍。
输入捕获实验
关于输入捕获呢,我们主要分成4个部分来介绍,先拆分来理解,再综合在一起理解。

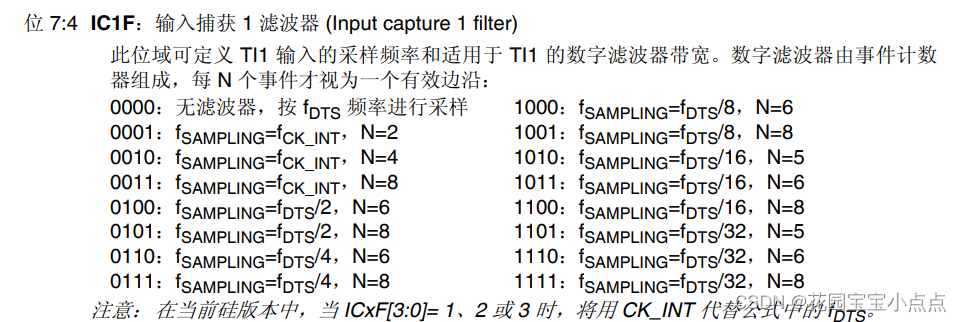
首先是第一部分:设置输入捕获滤波器,这一步是怎么实现的呢? 我们通俗一点来理解整个滤波的过程:其实就是通过设置CCMR1寄存器来选择滤波效果,而起到滤波作用的就是通过检测高电平来滤波。举个具体的例子:当ICF设置为0011时,需要连续检测到8次高电平才算有效,这样就有效的起到了滤波的作用。详细介绍会贴在下面,需要的同学自行观看。
输入捕获1滤波器 ICIF[3:0],这个用来设置输入采样频率和数字滤波器长度。其中,fck_INT是定时器的输入频率(TIMxCLK),一般为 84Mhz,而fDTS则是根据 TIMx_CRI 的 CKD[1:0]的设置来确定的,如果 CKD[1:0]设置为 00,那么fDTS=fcx_INT。N 值就是滤波长度,举个简单的例子;假设 IC1F[3:0]=0011,并设置IC1映射到通道1上,且常上升沿触发。那么在捕获到上升沿的时候,再以fck_INT的频率,连续采样到8次通道1 的电平,如果都是高电平,则说明却是一个有效的触发,就会触发输入捕获中断。这样可以滤除那些高电平脉宽低于 8 个采样周期的脉冲信号,从而达到滤波的效果。
然后就是设置输入捕获极性,这个部分通俗一点来讲,就是用来捕获电平的,经过了前面的滤波操作,现在就是开始记录电平值了,然后设置高电平有效还是低电平有效。

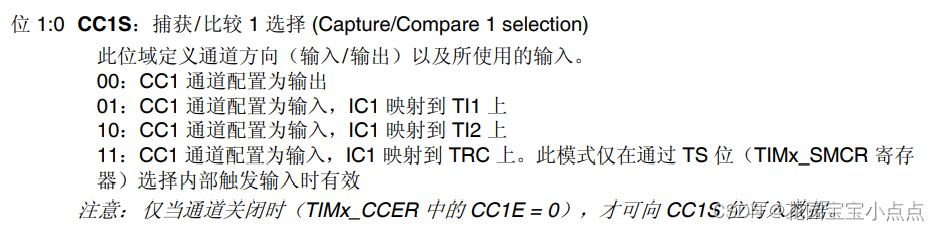
然后是设置输入捕获映射通道,这个就是选择设置信号的通道,或者说来源。
最后就是设置输入捕获分频器,这个怎么去理解呢?就是选择几分频,比如选择2分频,就是两次上升沿才触发一次捕获 。

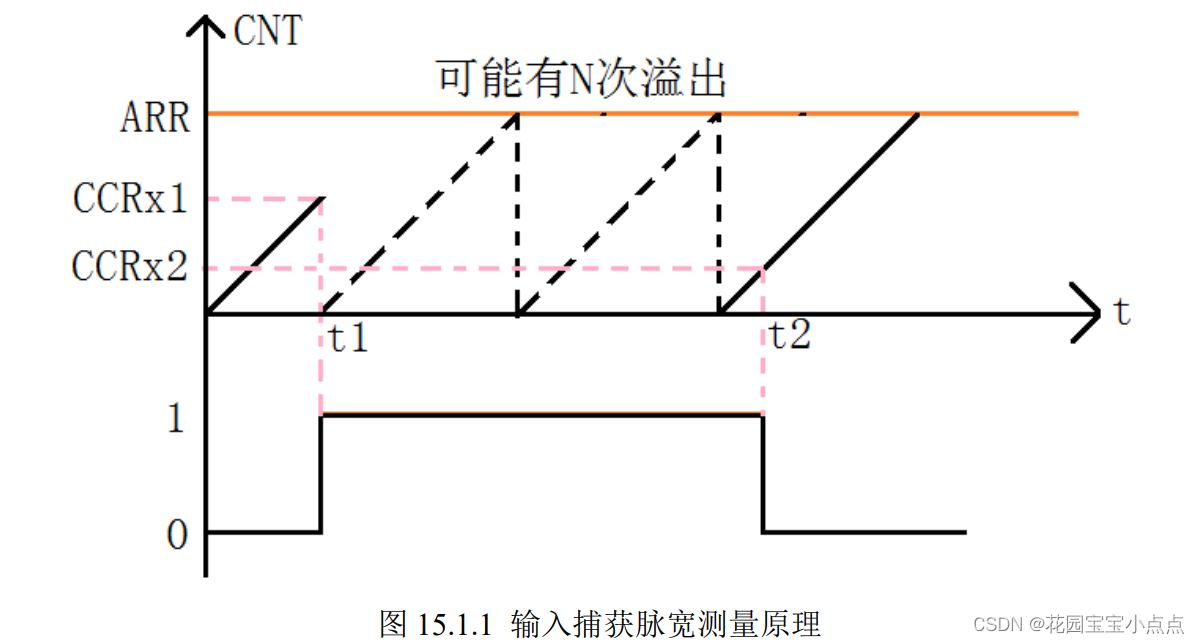
我们最后来总结一下,整个过程就是通过检测TIMx_CHx上的边沿信号,在边沿信号发生跳变(比如上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。
关于如何获取所需时间,有同学可能第一时间想到的就是在上升沿计数器设为0,然后下降沿读出计数器,就能得到相应时间了,但是这样其实有个小问题,就是有可能有溢出。我们如何解决这个问题呢?答案就是记录中断溢出的次数,然后在后面加上这些时间就好了。
- 开启 TIM5 时钟,配置 PA0 为复用功能(AF2),并开启下拉电阻。
- 初始化 TIM5,设置 TIM5 的 ARR 和 PSC。
- 设置 TIM5 的输入捕获参数,开启输入捕获。
- 使能捕获和更新中断(设置 TIM5 的 DIER 寄存器)。
- 设置中断优先级,编写中断服务函数。
- 使能定时器(设置 TIM5 的 CR1 寄存器)。
接下来我们就来结合代码来解释一下。
#include "timer.h"
//TIM14 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM14_PWM_Init(u32 arr,u32 psc)
{
//此部分需手动修改IO口设置
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14,ENABLE); //TIM14时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); //使能PORTF时钟
GPIO_PinAFConfig(GPIOF,GPIO_PinSource9,GPIO_AF_TIM14); //GPIOF9复用位定时器14
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //GPIOA9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF,&GPIO_InitStructure); //初始化PF9
TIM_TimeBaseStructure.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=arr; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM14,&TIM_TimeBaseStructure);
//初始化TIM14 Channel1 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_Pulse=0;
TIM_OC1Init(TIM14, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM14, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_ARRPreloadConfig(TIM14,ENABLE);
TIM_Cmd(TIM14, ENABLE); //使能TIM14
}
//定时器5通道1输入捕获配置
//arr:自动重装值(TIM2,TIM5是32位的!!)
//psc:时钟预分频数
void TIM5_CH1_Cap_Init(u32 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM5_ICInitStruct;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5,ENABLE);//TIM5时钟使能
GPIO_PinAFConfig(GPIOA,GPIO_PinSource0,GPIO_AF_TIM5);//使能PORTA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIOA0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN; //下拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA0
TIM_TimeBaseStructure.TIM_Prescaler=psc; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period=arr; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM5,&TIM_TimeBaseStructure);
TIM5_ICInitStruct.TIM_Channel = TIM_Channel_1;//选择输入端 IC1映射到TI1上
TIM5_ICInitStruct.TIM_ICFilter = 0x00;//上升沿捕获
TIM5_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;//映射到TI1上
TIM5_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;//配置输入分频,不分频
TIM5_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;// 配置输入滤波器 不滤波
TIM_ICInit(TIM5 ,&TIM5_ICInitStruct);
TIM_ITConfig(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);
TIM_Cmd(TIM5,ENABLE ); //使能定时器5
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =2; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
}
//捕获状态
//[7]:0,没有成功的捕获;1,成功捕获到一次.
//[6]:0,还没捕获到低电平;1,已经捕获到低电平了.
//[5:0]:捕获低电平后溢出的次数(对于32位定时器来说,1us计数器加1,溢出时间:4294秒)
u8 TIM5CH1_CAPTURE_STA=0; //输入捕获状态
u32 TIM5CH1_CAPTURE_VAL; //输入捕获值(TIM2/TIM5是32位)
//定时器5中断服务程序
void TIM5_IRQHandler(void)
{
if((TIM5CH1_CAPTURE_STA&0X80)==0)//还未成功捕获
{
//溢出
if(TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET)
{
if(TIM5CH1_CAPTURE_STA&0X40)//已经捕获到高电平了
{
if((TIM5CH1_CAPTURE_STA&0X3F)==0X3F)//高电平太长了
{
TIM5CH1_CAPTURE_STA|=0X80; //标记成功捕获了一次
TIM5CH1_CAPTURE_VAL=0XFFFFFFFF;
}else TIM5CH1_CAPTURE_STA++;
}
}
//未溢出
if(TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET)//捕获1发生捕获事件
{
if(TIM5CH1_CAPTURE_STA&0X40) //捕获到一个下降沿
{
TIM5CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽
TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5);//获取当前的捕获值.
TIM_OC1PolarityConfig(TIM5,TIM_OCPolarity_High); //CC1P=0 设置为上升沿捕获
}else //还未开始,第一次捕获上升沿
{
TIM5CH1_CAPTURE_STA=0; //清空
TIM5CH1_CAPTURE_VAL=0;
TIM5CH1_CAPTURE_STA|=0X40; //标记捕获到了上升沿
TIM_Cmd(TIM5,DISABLE ); //关闭定时器5
TIM_SetCounter(TIM5,0);
TIM_OC1PolarityConfig(TIM5,TIM_OCPolarity_Low); //CC1P=1 设置为下降沿捕获
TIM_Cmd(TIM5,ENABLE ); //使能定时器5
}
}
}
TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); //清除中断标志位
}#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "timer.h"
extern u8 TIM5CH1_CAPTURE_STA; //输入捕获状态
extern u32 TIM5CH1_CAPTURE_VAL; //输入捕获值
int main(void)
{
long long temp=0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(168); //初始化延时函数
uart_init(115200);//初始化串口波特率为115200
TIM5_CH1_Cap_Init(0XFFFFFFFF,84-1); //以1Mhz的频率计数
while(1)
{
delay_ms(10);
if(TIM5CH1_CAPTURE_STA&0X80) //成功捕获到了一次高电平
{
temp=TIM5CH1_CAPTURE_STA&0X3F; // 一共溢出几次
temp*=0XFFFFFFFF; //溢出时间总和
temp+=TIM5CH1_CAPTURE_VAL; //得到总的高电平时间
printf("HIGH:%lld us\r\n",temp); //打印总的高点平时间
TIM5CH1_CAPTURE_STA=0; //开启下一次捕获
}
}
}本节介绍的是输入捕获实验,其实也是定时器的一个运用,还是觉得繁琐一点,但确实精确了许多。好了,我们就介绍到这,希望对大家有所帮助,如果有错误也希望能及时指出,谢谢大家。
文章目录1.开发板选择*用到的资源2.串口通信(个人理解)3.代码分析(注释比较详细)1.主函数2.串口1配置3.串口2配置以及中断函数4.注意问题5.源码链接1.开发板选择我用的是STM32F103RCT6的板子,不过代码大概在F103系列的板子上都可以运行,我试过在野火103的霸道板上也可以,主要看一下串口对应的引脚一不一样就行了,不一样的就更改一下。*用到的资源keil5软件这里用到了两个串口资源,采集数据一个,串口通信一个,板子对应引脚如下:串口1,TX:PA9,RX:PA10串口2,TX:PA2,RX:PA32.串口通信(个人理解)我就从串口采集传感器数据这个过程说一下我自己的理解,
我正在尝试使用ruby编写一个双线程客户端,一个线程从套接字读取数据并将其打印出来,另一个线程读取本地数据并将其发送到远程服务器。我发现的问题是Ruby似乎无法捕获线程内的错误,这是一个示例:#!/usr/bin/rubyThread.new{loop{$stdout.puts"hi"abc.putsefsleep1}}loop{sleep1}显然,如果我在线程外键入abc.putsef,代码将永远不会运行,因为Ruby将报告“undefinedvariableabc”。但是,如果它在一个线程内,则没有错误报告。我的问题是,如何让Ruby捕获这样的错误?或者至少,报告线程中的错误?
我在使用自定义RailsFormBuilder时遇到了问题,从昨天晚上开始我就发疯了。基本上我想对我的构建器方法之一有一个可选block,以便我可以在我的主要content_tag中显示其他内容。:defform_field(method,&block)content_tag(:div,class:'field')doconcatlabel(method,"Label#{method}")concattext_field(method)capture(&block)ifblock_given?endend当我在我的一个Slim模板中调用该方法时,如下所示:=f.form_field:e
这是针对我无法破坏的现有公共(public)API,但我确实希望对其进行扩展。目前,该方法采用字符串或符号或任何其他在作为第一个参数传递给send时有意义的内容我想添加发送字符串、符号等列表的功能。我可以只使用is_a吗?数组,但还有其他发送列表的方法,这不是很像ruby。我将调用列表中的map,所以第一个倾向是使用respond_to?:map。但是字符串也会响应:map,所以这行不通。 最佳答案 如何将它们全部视为数组?String的行为与仅包含String的Array相同:deffoo(obj,arg)[*arg].eac
我想从rubyrake脚本运行一个可执行文件,比如foo.exe我希望将foo.exe的STDOUT和STDERR输出直接写入我正在运行rake任务的控制台.当进程完成时,我想将退出代码捕获到一个变量中。我如何实现这一目标?我一直在玩backticks、process.spawn、system但我无法获得我想要的所有行为,只有部分更新:我在Windows上,在标准命令提示符下,而不是cygwin 最佳答案 system获取您想要的STDOUT行为。它还返回true作为零退出代码,这可能很有用。$?填充了有关最后一次system调
我有一个像这样的ruby类:require'logger'classTdefdo_somethinglog=Logger.new(STDERR)log.info("Hereisaninfomessage")endend测试脚本行如下:#!/usr/bin/envrubygem"minitest"require'minitest/autorun'require_relative't'classTestMailProcessorClasses当我运行这个测试时,out和err都是空字符串。我看到消息打印在stderr上(在终端上)。有没有办法让Logger和capture_io一起玩得
关于SSHkit-Github它说:Allbackendssupporttheexecute(*args),test(*args)&capture(*args)来自SSHkit-Rubydoc,我明白execute实际上是test的别名?test之间有什么区别?,execute,capture在Capistrano/SSHKit中我应该什么时候使用? 最佳答案 执行只是执行命令。使用非0退出引发错误。测试方法的行为与execute完全相同,但是它返回bool值(true如果命令以0退出,而false否则)。它通常用于控制任务中的流程
我们如何捕获或/和处理ruby中所有未处理的异常?例如,这样做的动机可能是将某种异常记录到不同的文件或发送电子邮件给系统管理。在Java中我们会做Thread.setDefaultUncaughtExceptionHandler(UncaughtExceptionHandlerex);在Node.js中process.on('uncaughtException',function(error){/*code*/});在PHP中register_shutdown_function('errorHandler');functionerrorHandler(){$error=error_
这就是我做的a="%span.rockets#diamonds.ribbons.forever"a=a.match(/(^\%\w+)([\.|\#]\w+)+/)putsa.inspect这是我得到的#这就是我想要的#帮助?我尝试过但失败了:( 最佳答案 通常,您不能获得任意数量的捕获组,但如果您使用扫描,您可以为您想要捕获的每个标记获得一个匹配:a="%span.rockets#diamonds.ribbons.forever"a=a.scan(/^%\w+|\G[.|#]\w+/)putsa.inspect["%span","
我希望访问我机器上的所有HTTP流量(我的Windows机器-不是服务器)。据我了解,拥有一个本地代理是所有流量路线的必经之路。我一直在谷歌搜索但未能找到任何资源(关于Ruby)来帮助我。非常感谢任何提示或链接。 最佳答案 WEBrick中有一个HTTP代理(Rubystdlib的一部分)和here's一个实现示例。如果你喜欢生活在边缘,还有em-proxy伊利亚·格里戈里克。这postIlya暗示它似乎确实需要一些调整来解决您的问题。 关于ruby-如何捕获所有HTTP流量(本地代理)