什么是联邦学习?
简单来说就是在一个多方的环境中,数据集是零散的(在各个不同的客户端中),那么怎样实现机器学习算法呢?
首先想到的就是将多个数据集合并合并起来,然后统一的使用传统的机器学习或者深度学习算法进行计算,但是如果有一方因为数据隐私问题不愿意提交自己的数据呢?
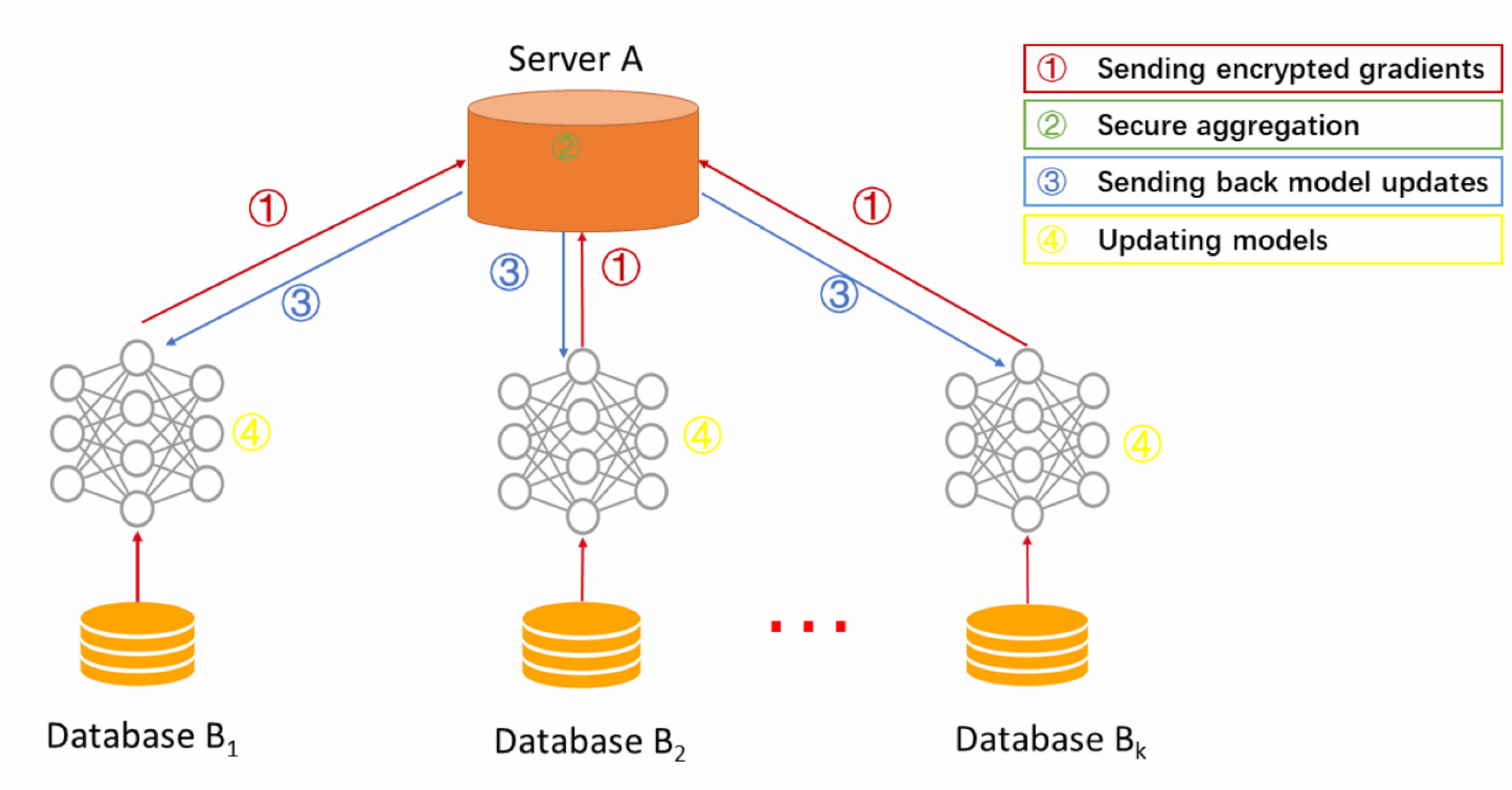
那么就出现了联邦学习,核心就是“数据不动模型动,数据可用不可见”
多个客户端不提交数据而是提交训练时的参数/梯度给中心服务器,中心服务器进行计算后再将参数/梯度返回多个客户端再学习的过程
整个过程数据的所有权依然在用户手中,这就是联邦学习
当然数据隐私方面,联邦学习还将结合同态加密、安全多方计算、查分隐私等隐私计算技术实现更安全的保障
(ps:这里只是简单的介绍,详细的内容请多查阅其他资料)
基本概念入门学习见:《Federated_Machine_Learning:Concept_and_Applications》精读
实验基于机器学习库PyTorch, 所以需要一些基础的PyTorch使用
(ps:不会也没事,下面代码有详细的注释,因为我也刚刚入门 😃 )
pip install torchCUDA、cuDNN数据集:CIFAR10
模型:ResNet-18
环境角色:
为了简化,这里服务器客户端都是在单机上模拟,后面使用FATE会在真实多台机器上实现
基本的流程:
配置文件包含了整个项目的模型、数据集、epoch等核心训练参数
需要注意的是,一般来说配置文件需要在所有的客户端与服务端之间同步一致
创建一个配置文件:
项目文件夹下./utils/conf.json创建配置文件:
{
"model_name" : "resnet18",
"no_models" : 10,
"type" : "cifar",
"global_epochs" : 20,
"local_epochs" : 3,
"k" : 6,
"batch_size" : 32,
"lr" : 0.001,
"momentum" : 0.0001,
"lambda" : 0.1
}
构建数据集代码如下:
datasets.py
import torchvision as tv
# 获取数据集
def get_dataset(dir, name):
if name == 'mnist':
# root: 数据路径
# train参数表示是否是训练集或者测试集
# download=true表示从互联网上下载数据集并把数据集放在root路径中
# transform:图像类型的转换
train_dataset = tv.datasets.MNIST(dir, train=True, download=True, transform=tv.transforms.ToTensor())
eval_dataset = tv.datasets.MNIST(dir, train=False, transform=tv.transforms.ToTensor())
elif name == 'cifar':
# 设置两个转换格式
# transforms.Compose 是将多个transform组合起来使用(由transform构成的列表)
transform_train = tv.transforms.Compose([
# transforms.RandomCrop: 切割中心点的位置随机选取
tv.transforms.RandomCrop(32, padding=4), tv.transforms.RandomHorizontalFlip(),
tv.transforms.ToTensor(),
# transforms.Normalize: 给定均值:(R,G,B) 方差:(R,G,B),将会把Tensor正则化
tv.transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
])
transform_test = tv.transforms.Compose([
tv.transforms.ToTensor(),
tv.transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
])
train_dataset = tv.datasets.CIFAR10(dir, train=True, download=True, transform=transform_train)
eval_dataset = tv.datasets.CIFAR10(dir, train=False, transform=transform_test)
return train_dataset, eval_dataset
服务端的主要功能是模型的聚合、评估,最终的模型也是在服务器上生成
首先创建一个服务类
所有的程序放在server.py
定义其构造函数:
# 定义构造函数
def __init__(self, conf, eval_dataset):
# 导入配置文件
self.conf = conf
# 根据配置获取模型文件
self.global_model = models.get_model(self.conf["model_name"])
# 生成一个测试集合加载器
self.eval_loader = torch.utils.data.DataLoader(
eval_dataset,
# 设置单个批次大小32
batch_size=self.conf["batch_size"],
# 打乱数据集
shuffle=True
)
定义全局联邦平均FedAvg聚合函数:
FedAvg算法的公式如下:
G t + 1 = G t + λ ∑ i = 1 m ( L i t + 1 − G i t ) G^{t+1} = G^{t} + \lambda \sum^m_{i=1}(L_i^{t+1}-G_i^t) Gt+1=Gt+λ∑i=1m(Lit+1−Git)
G t G^t Gt表示第t轮更新的全局模型参数, L i t + 1 L_i^{t+1} Lit+1表示第i个客户端在第t+1轮本地更新后的模型
在模型聚合时,weight_accumulator就是
(
L
i
t
+
1
−
G
i
t
)
i
=
1
,
2
,
.
.
.
m
(L_i^{t+1}-G_i^t) \ i = 1,2,...m
(Lit+1−Git) i=1,2,...m部分,具体weight_accumulator的计算会在后面详细介绍其实现
# 全局聚合模型
# weight_accumulator 存储了每一个客户端的上传参数变化值/差值
def model_aggregate(self, weight_accumulator):
# 遍历服务器的全局模型
for name, data in self.global_model.state_dict().items():
# 更新每一层乘上学习率
update_per_layer = weight_accumulator[name] * self.conf["lambda"]
# 累加和
if data.type() != update_per_layer.type():
# 因为update_per_layer的type是floatTensor,所以将起转换为模型的LongTensor(有一定的精度损失)
data.add_(update_per_layer.to(torch.int64))
else:
data.add_(update_per_layer)
定义模型评估函数
评估函数主要是不断的评估当前模型的性能,判断是否可以提前终止迭代或者是出现了发散退化等现象
# 评估函数
def model_eval(self):
self.global_model.eval() # 开启模型评估模式(不修改参数)
total_loss = 0.0
correct = 0
dataset_size = 0
# 遍历评估数据集合
for batch_id, batch in enumerate(self.eval_loader):
data, target = batch
# 获取所有的样本总量大小
dataset_size += data.size()[0]
# 存储到gpu
if torch.cuda.is_available():
data = data.cuda()
target = target.cuda()
# 加载到模型中训练
output = self.global_model(data)
# 聚合所有的损失 cross_entropy交叉熵函数计算损失
total_loss += torch.nn.functional.cross_entropy(
output,
target,
reduction='sum'
).item()
# 获取最大的对数概率的索引值, 即在所有预测结果中选择可能性最大的作为最终的分类结果
pred = output.data.max(1)[1]
# 统计预测结果与真实标签target的匹配总个数
correct += pred.eq(target.data.view_as(pred)).cpu().sum().item()
acc = 100.0 * (float(correct) / float(dataset_size)) # 计算准确率
total_1 = total_loss / dataset_size # 计算损失值
return acc, total_1
客户端的主要功能是:
此部分所有程序都在client.py中
定义client类
# 构造函数
def __init__(self, conf, model, train_dataset, id = 1):
# 配置文件
self.conf = conf
# 客户端本地模型(一般由服务器传输)
self.local_model = model
# 客户端ID
self.client_id = id
# 客户端本地数据集
self.train_dataset = train_dataset
# 按ID对训练集合的拆分
all_range = list(range(len(self.train_dataset)))
data_len = int(len(self.train_dataset) / self.conf['no_models'])
indices = all_range[id * data_len: (id + 1) * data_len]
# 生成一个数据加载器
self.train_loader = torch.utils.data.DataLoader(
# 制定父集合
self.train_dataset,
# batch_size每个batch加载多少个样本(默认: 1)
batch_size=conf["batch_size"],
# 指定子集合
# sampler定义从数据集中提取样本的策略
sampler=torch.utils.data.sampler.SubsetRandomSampler(indices)
)
本案例中根据ID将数据集进行横向切分,每个客户端之间没有交集
本地模型训练函数:采用交叉熵作为本地训练的损失函数,并使用梯度下降来求解参数
# 模型本地训练函数
def local_train(self, model):
# 整体的过程:拉取服务器的模型,通过部分本地数据集训练得到
for name, param in model.state_dict().items():
# 客户端首先用服务器端下发的全局模型覆盖本地模型
self.local_model.state_dict()[name].copy_(param.clone())
# 定义最优化函数器用于本地模型训练
optimizer = torch.optim.SGD(self.local_model.parameters(), lr=self.conf['lr'], momentum=self.conf['momentum'])
# 本地训练模型
self.local_model.train() # 设置开启模型训练(可以更改参数)
# 开始训练模型
for e in range(self.conf["local_epochs"]):
for batch_id, batch in enumerate(self.train_loader):
data, target = batch
# 加载到gpu
if torch.cuda.is_available():
data = data.cuda()
target = target.cuda()
# 梯度
optimizer.zero_grad()
# 训练预测
output = self.local_model(data)
# 计算损失函数 cross_entropy交叉熵误差
loss = torch.nn.functional.cross_entropy(output, target)
# 反向传播
loss.backward()
# 更新参数
optimizer.step()
print("Epoch %d done" % e)
# 创建差值字典(结构与模型参数同规格),用于记录差值
diff = dict()
for name, data in self.local_model.state_dict().items():
# 计算训练后与训练前的差值
diff[name] = (data - model.state_dict()[name])
print("Client %d local train done" % self.client_id)
# 客户端返回差值
return diff
所有程序代码在main.py中
import argparse
import json
import random
import datasets
from client import *
from server import *
if __name__ == '__main__':
# 设置命令行程序
parser = argparse.ArgumentParser(description='Federated Learning')
parser.add_argument('-c', '--conf', dest='conf')
# 获取所有的参数
args = parser.parse_args()
# 读取配置文件
with open(args.conf, 'r') as f:
conf = json.load(f)
# 获取数据集, 加载描述信息
train_datasets, eval_datasets = datasets.get_dataset("./data/", conf["type"])
# 开启服务器
server = Server(conf, eval_datasets)
# 客户端列表
clients = []
# 添加10个客户端到列表
for c in range(conf["no_models"]):
clients.append(Client(conf, server.global_model, train_datasets, c))
print("\n\n")
# 全局模型训练
for e in range(conf["global_epochs"]):
print("Global Epoch %d" % e)
# 每次训练都是从clients列表中随机采样k个进行本轮训练
candidates = random.sample(clients, conf["k"])
print("select clients is: ")
for c in candidates:
print(c.client_id)
# 权重累计
weight_accumulator = {}
# 初始化空模型参数weight_accumulator
for name, params in server.global_model.state_dict().items():
# 生成一个和参数矩阵大小相同的0矩阵
weight_accumulator[name] = torch.zeros_like(params)
# 遍历客户端,每个客户端本地训练模型
for c in candidates:
diff = c.local_train(server.global_model)
# 根据客户端的参数差值字典更新总体权重
for name, params in server.global_model.state_dict().items():
weight_accumulator[name].add_(diff[name])
# 模型参数聚合
server.model_aggregate(weight_accumulator)
# 模型评估
acc, loss = server.model_eval()
print("Epoch %d, acc: %f, loss: %f\n" % (e, acc, loss))
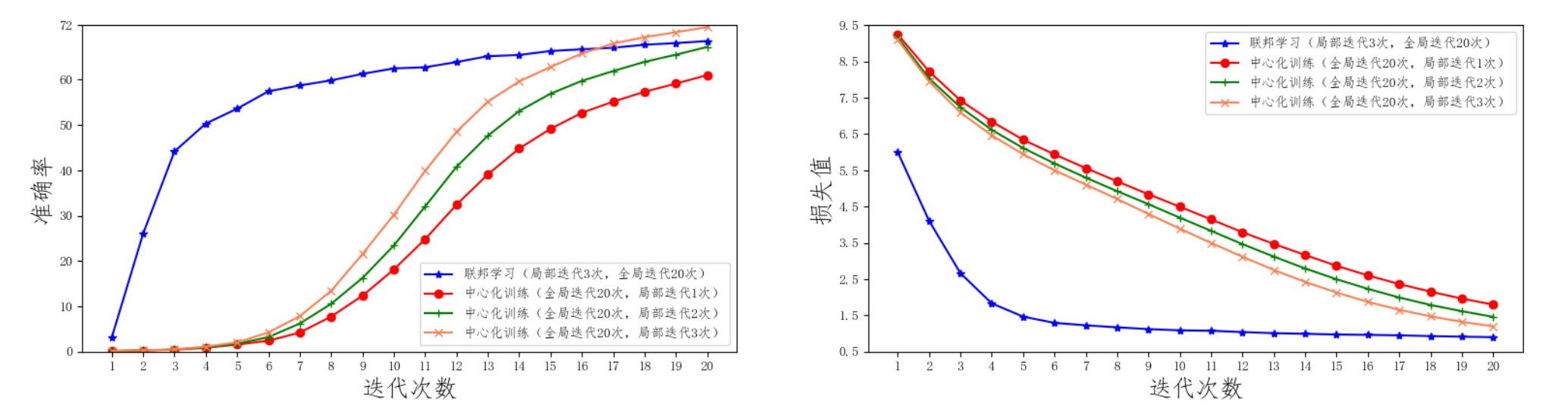
按照以上配置,(本人)运行后的准确度以及损失为:

官方的对比:
联邦学习与中心化训练的效果对比
联邦学习在模型推断上的效果对比
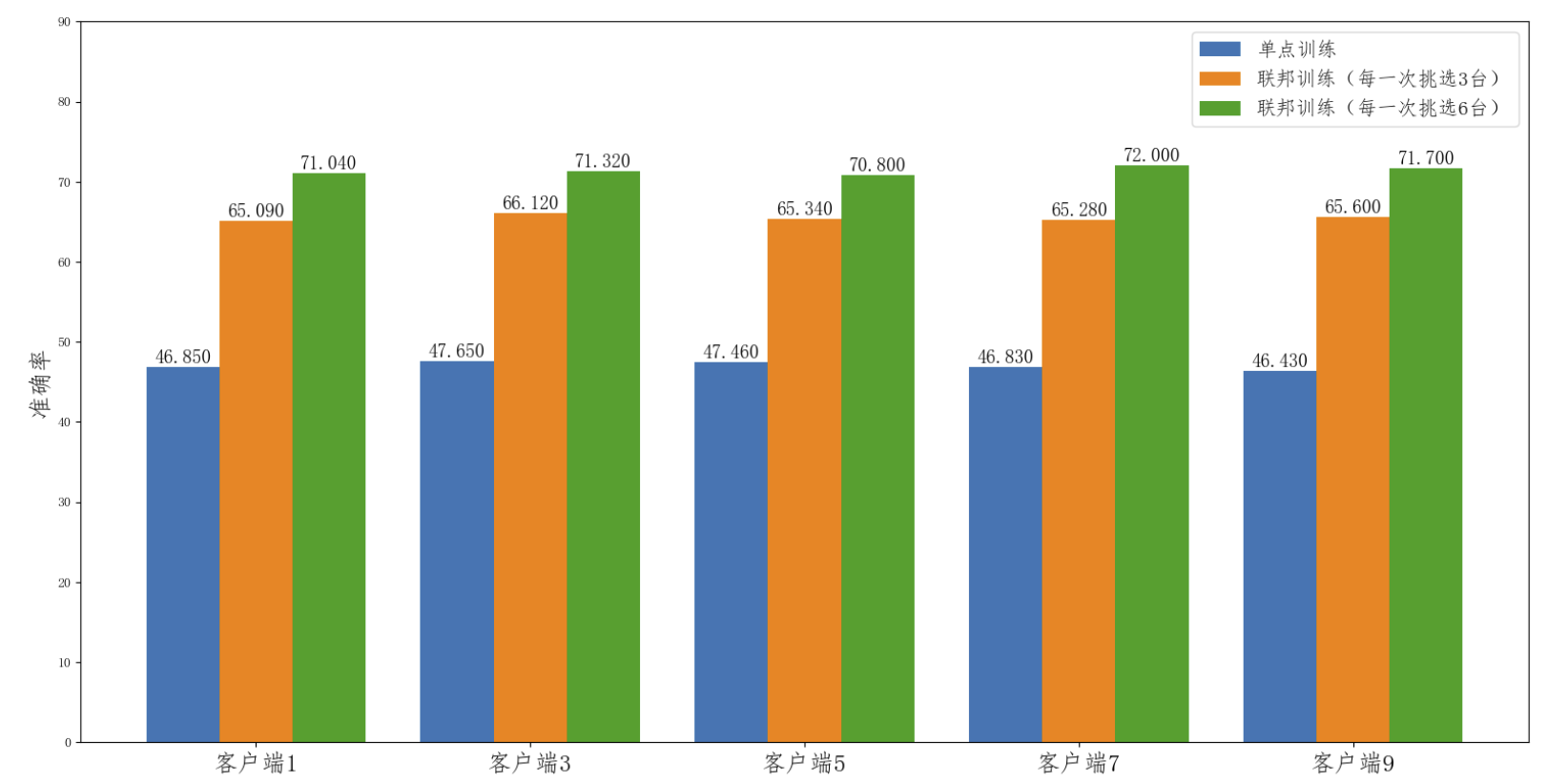
图中的单点训练只的是在某一个客户端下,利用本地的数据进行模型训练的结果。
学习资料来自于:
https://github.com/FederatedAI/Practicing-Federated-Learning/tree/main/chapter03_Python_image_classification
关闭。这个问题是opinion-based.它目前不接受答案。想要改进这个问题?更新问题,以便editingthispost可以用事实和引用来回答它.关闭4年前。Improvethisquestion我想在固定时间创建一系列低音和高音调的哔哔声。例如:在150毫秒时发出高音调的蜂鸣声在151毫秒时发出低音调的蜂鸣声200毫秒时发出低音调的蜂鸣声250毫秒的高音调蜂鸣声有没有办法在Ruby或Python中做到这一点?我真的不在乎输出编码是什么(.wav、.mp3、.ogg等等),但我确实想创建一个输出文件。
我有一个用户工厂。我希望默认情况下确认用户。但是鉴于unconfirmed特征,我不希望它们被确认。虽然我有一个基于实现细节而不是抽象的工作实现,但我想知道如何正确地做到这一点。factory:userdoafter(:create)do|user,evaluator|#unwantedimplementationdetailshereunlessFactoryGirl.factories[:user].defined_traits.map(&:name).include?(:unconfirmed)user.confirm!endendtrait:unconfirmeddoenden
这个问题在这里已经有了答案:关闭10年前。PossibleDuplicate:Pythonconditionalassignmentoperator对于这样一个简单的问题表示歉意,但是谷歌搜索||=并不是很有帮助;)Python中是否有与Ruby和Perl中的||=语句等效的语句?例如:foo="hey"foo||="what"#assignfooifit'sundefined#fooisstill"hey"bar||="yeah"#baris"yeah"另外,类似这样的东西的通用术语是什么?条件分配是我的第一个猜测,但Wikipediapage跟我想的不太一样。
什么是ruby的rack或python的Java的wsgi?还有一个路由库。 最佳答案 来自Python标准PEP333:Bycontrast,althoughJavahasjustasmanywebapplicationframeworksavailable,Java's"servlet"APImakesitpossibleforapplicationswrittenwithanyJavawebapplicationframeworktoruninanywebserverthatsupportstheservletAPI.ht
华为OD机试题本篇题目:明明的随机数题目输入描述输出描述:示例1输入输出说明代码编写思路最近更新的博客华为od2023|什么是华为od,od薪资待遇,od机试题清单华为OD机试真题大全,用Python解华为机试题|机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为o
这篇文章是继上一篇文章“Observability:从零开始创建Java微服务并监控它(一)”的续篇。在上一篇文章中,我们讲述了如何创建一个Javaweb应用,并使用Filebeat来收集应用所生成的日志。在今天的文章中,我来详述如何收集应用的指标,使用APM来监控应用并监督web服务的在线情况。源码可以在地址 https://github.com/liu-xiao-guo/java_observability 进行下载。摄入指标指标被视为可以随时更改的时间点值。当前请求的数量可以改变任何毫秒。你可能有1000个请求的峰值,然后一切都回到一个请求。这也意味着这些指标可能不准确,你还想提取最小/
我想解析一个已经存在的.mid文件,改变它的乐器,例如从“acousticgrandpiano”到“violin”,然后将它保存回去或作为另一个.mid文件。根据我在文档中看到的内容,该乐器通过program_change或patch_change指令进行了更改,但我找不到任何在已经存在的MIDI文件中执行此操作的库.他们似乎都只支持从头开始创建的MIDI文件。 最佳答案 MIDIpackage会为您完成此操作,但具体方法取决于midi文件的原始内容。一个MIDI文件由一个或多个音轨组成,每个音轨是十六个channel中任何一个上的
C#实现简易绘图工具一.引言实验目的:通过制作窗体应用程序(C#画图软件),熟悉基本的窗体设计过程以及控件设计,事件处理等,熟悉使用C#的winform窗体进行绘图的基本步骤,对于面向对象编程有更加深刻的体会.Tutorial任务设计一个具有基本功能的画图软件**·包括简单的新建文件,保存,重新绘图等功能**·实现一些基本图形的绘制,包括铅笔和基本形状等,学习橡皮工具的创建**·设计一个合理舒适的UI界面**注明:你可能需要先了解一些关于winform窗体应用程序绘图的基本知识,以及关于GDI+类和结构的知识二.实验环境Windows系统下的visualstudio2017C#窗体应用程序三.
本文主要介绍在使用Selenium进行自动化测试或者任务时,对于使用了iframe的页面,如何定位iframe中的元素文章目录场景描述解决方案具体代码场景描述当我们在使用Selenium进行自动化测试的时候,可能会遇到一些界面或者窗体是使用HTML的iframe标签进行承载的。对于iframe中的标签,如果直接查找是无法找到的,会抛出没有找到元素的异常。比如近在咫尺的例子就是,CSDN的登录窗体就是使用的iframe,大家可以尝试通过F12开发者模式查看到的tag_name,class_name,id或者xpath来定位中的页面元素,会抛出NoSuchElementException异常。解决
目录前言滤波电路科普主要分类实际情况单位的概念常用评价参数函数型滤波器简单分析滤波电路构成低通滤波器RC低通滤波器RL低通滤波器高通滤波器RC高通滤波器RL高通滤波器部分摘自《LC滤波器设计与制作》,侵权删。前言最近需要学习放大电路和滤波电路,但是由于只在之前做音乐频谱分析仪的时候简单了解过一点点运放,所以也是相当从零开始学习了。滤波电路科普主要分类滤波器:主要是从不同频率的成分中提取出特定频率的信号。有源滤波器:由RC元件与运算放大器组成的滤波器。可滤除某一次或多次谐波,最普通易于采用的无源滤波器结构是将电感与电容串联,可对主要次谐波(3、5、7)构成低阻抗旁路。无源滤波器:无源滤波器,又称